TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024068099
公報種別
公開特許公報(A)
公開日
2024-05-17
出願番号
2023130017,2022178263
出願日
2023-08-09,2022-11-07
発明の名称
作業車両
出願人
井関農機株式会社
代理人
主分類
A01C
15/00 20060101AFI20240510BHJP(農業;林業;畜産;狩猟;捕獲;漁業)
要約
【課題】 田植え機のような作業車両が、知られている。本発明者は、作業車両ユーザーのさまざまなニーズを考慮し、便利な機能がかくの如き作業車両へつぎつぎと実装される趨勢はますます加速すると考えている。しかしながら、従来の田植え機のような作業車両については、便利な機能を利用するときの使い勝手が必ずしもよくないことに本発明者は気付いた。
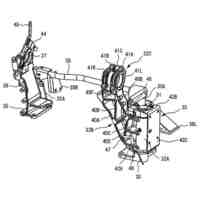
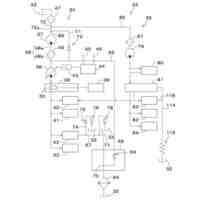
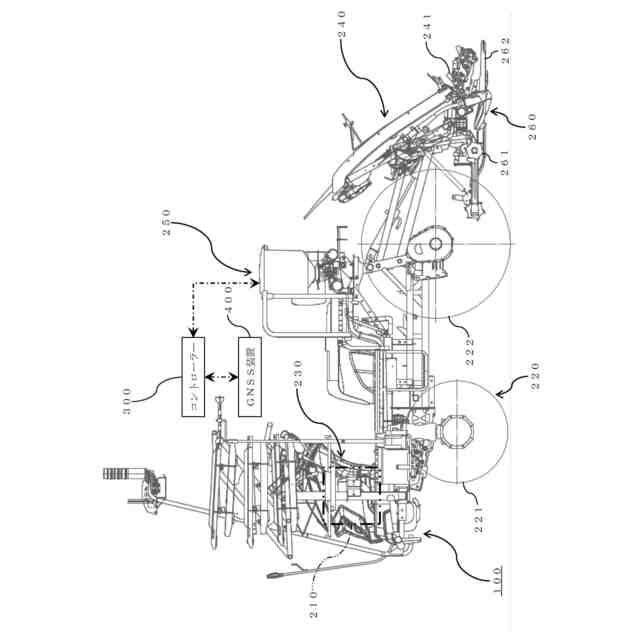
【解決手段】 作業地の施肥作業マップおよび車体100のGNSS車体位置情報に基づいて、前記作業地における施肥作業を行うコントローラー300を備えており、前記コントローラー300は、前記施肥作業マップおよび前記GNSS車体位置情報を利用することにより、前記車体100が前記作業地の外に位置すると判断したときでも、あらかじめ定められた例外的施肥ルールが満足されている場合においては、施肥作業を例外的に行う田植え機である。
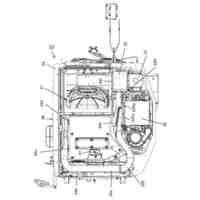
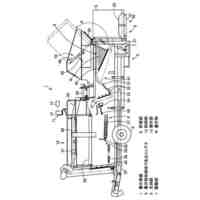
【選択図】 図1
特許請求の範囲
【請求項1】
作業地の施肥作業マップおよび車体(100)のGNSS車体位置情報に基づいて、前記作業地における施肥作業を行うコントローラー(300)を備えており、
前記コントローラー(300)は、前記施肥作業マップおよび前記GNSS車体位置情報を利用することにより、前記車体(100)が前記作業地の外に位置すると判断したときでも、あらかじめ定められた例外的施肥ルールが満足されている場合においては、施肥作業を例外的に行う作業車両であって、
前記施肥作業は、メッシュ状に区切られた前記施肥作業マップの前記作業地の区画に対応付けられて入力された施肥指示値に応じて行われ、
前記例外的施肥ルールが満足されている場合とは、前記車体(100)が前記作業地の外周部から逸脱したレベルがあらかじめ定められたレベルを超えない場合であり、
前記車体(100)が前記作業地から逸脱したとき、車体(100)位置から近傍の各区画に対応付けられて入力された平均施肥指示値が施肥指示値としてセットされることを特徴とする作業車両。
続きを表示(約 430 文字)
【請求項2】
セットされた前記施肥指示値は、保持され、リセット条件が満足された場合においては、リセットされ、
前記リセット条件が満足された場合とは、前記車体(100)が周部から逸脱したレベルがあらかじめ定められたレベルを超えた場合であることを特徴とする請求項1に記載の作業車両。
【請求項3】
セットされた前記施肥指示値は、保持され、リセット条件が満足された場合においては、リセットされ、
前記リセット条件が満足された場合とは、前記車体(100)が所定の角度以上の傾斜
角度で傾斜した場合であることを特徴とする請求項1または2に記載の作業車両。
【請求項4】
セットされた前記施肥指示値は、保持され、リセット条件が満足された場合においては、リセットされ、
前記リセット条件が満足された場合とは、前記車体(100)の近傍に施肥指示値がない場合であることを特徴とする請求項1または2に記載の作業車両。
発明の詳細な説明
【技術分野】
【0001】
本発明は、田植え機のような作業車両に関する。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
田植え機のような作業車両が、知られている(たとえば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
特開2016-24541号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、本発明者は、作業車両ユーザーのさまざまなニーズを考慮し、便利な機能がかくの如き作業車両へつぎつぎと実装される趨勢はますます加速すると考えている。
【0005】
しかしながら、上述された従来の田植え機のような作業車両については、便利な機能を利用するときの使い勝手が必ずしもよくないことに本発明者は気付いた。
【0006】
本発明は、上述された従来の課題を考慮し、使い勝手を向上することができる作業車両を提供することを目的とする。
【課題を解決するための手段】
【0007】
第1の本発明は、作業地の施肥作業マップおよび車体(100)のGNSS車体位置情報に基づいて、前記作業地における施肥作業を行うコントローラー(300)を備えており、
前記コントローラー(300)は、前記施肥作業マップおよび前記GNSS車体位置情報を利用することにより、前記車体(100)が前記作業地の外に位置すると判断したときでも、あらかじめ定められた例外的施肥ルールが満足されている場合においては、施肥作業を例外的に行う作業車両であって、
前記施肥作業は、メッシュ状に区切られた前記施肥作業マップの前記作業地の区画に対応付けられて入力された施肥指示値に応じて行われ、
前記例外的施肥ルールが満足されている場合とは、前記車体(100)が前記作業地の外周部から逸脱したレベルがあらかじめ定められたレベルを超えない場合であり、
前記車体(100)が前記作業地から逸脱したとき、車体(100)位置から近傍の各区画に対応付けられて入力された平均施肥指示値が施肥指示値としてセットされることを特徴とする作業車両である。
【0008】
第2の本発明は、セットされた前記施肥指示値は、保持され、リセット条件が満足された場合においては、リセットされ、
前記リセット条件が満足された場合とは、前記車体(100)が周部から逸脱したレベルがあらかじめ定められたレベルを超えた場合であることを特徴とする請求項1に記載の作業車両である。
【0009】
第3の本発明は、セットされた前記施肥指示値は、保持され、リセット条件が満足された場合においては、リセットされ、
前記リセット条件が満足された場合とは、前記車体(100)が所定の角度以上の傾斜
角度で傾斜した場合であることを特徴とする請求項1または2に記載の作業車両である。
【0010】
第4の本発明は、セットされた前記施肥指示値は、保持され、リセット条件が満足された場合においては、リセットされ、
前記リセット条件が満足された場合とは、前記車体(100)の近傍に施肥指示値がない場合であることを特徴とする請求項1または2に記載の作業車両である。
【発明の効果】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
井関農機株式会社
作業車両
6日前
井関農機株式会社
作業車両
6日前
井関農機株式会社
作業車両
24日前
井関農機株式会社
作業車両
27日前
井関農機株式会社
コンバイン
12日前
井関農機株式会社
コンバイン
12日前
井関農機株式会社
植物栽培設備
17日前
井関農機株式会社
自律走行コンバイン
27日前
井関農機株式会社
作業車両
5日前
個人
釣り用錘り
1か月前
個人
イカ釣りの仕掛け
6日前
個人
ルアーホルダ
2日前
井関農機株式会社
作業機
1か月前
井関農機株式会社
作業車両
27日前
個人
ペット用オムツカバー
24日前
株式会社シマノ
蓋栓
23日前
個人
手押し式草刈り機
2日前
株式会社ジェンク
除草システム
3日前
株式会社大貴
動物用トイレ
1か月前
井関農機株式会社
作業車両
1か月前
株式会社DRT
釣り用ルアー
12日前
松山株式会社
農作業機
6日前
東邦化学工業株式会社
除菌剤組成物
2日前
個人
穂先先端部釣糸導入孔中通し釣竿
1か月前
株式会社ナカショウ
園芸用防虫ネット
5日前
株式会社リレイション
猫用絵本
24日前
RUDIE’S株式会社
釣り用錘
27日前
株式会社ワイズグロウ
水浄化設備
16日前
株式会社小川農具製作所
穴明け装置
1か月前
株式会社大阪製薬
ダニ防除剤
24日前
有限会社ルミエール
有害動物忌避装置
1か月前
グローブライド株式会社
ルアー
6日前
株式会社リッチェル
ペット用玩具
2日前
株式会社クボタ
作業車両
6日前
住友化学株式会社
液状農薬組成物
6日前
本田技研工業株式会社
芝刈機
6日前
続きを見る
他の特許を見る









 特許ウォッチ
特許ウォッチ