TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024131707
公報種別
公開特許公報(A)
公開日
2024-09-30
出願番号
2023042133
出願日
2023-03-16
発明の名称
作業車両
出願人
井関農機株式会社
代理人
弁理士法人新大阪国際特許事務所
主分類
A01B
69/00 20060101AFI20240920BHJP(農業;林業;畜産;狩猟;捕獲;漁業)
要約
【課題】 従来のトラクターのような作業車両については、便利な機能を利用するときの使い勝手が必ずしもよくない。
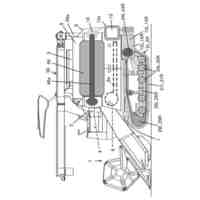
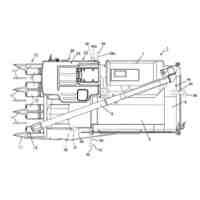
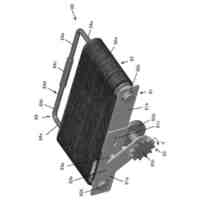
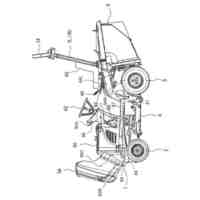
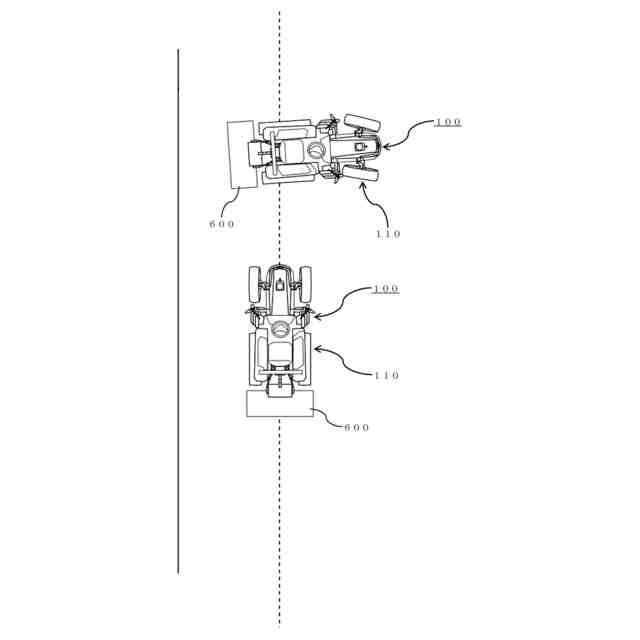
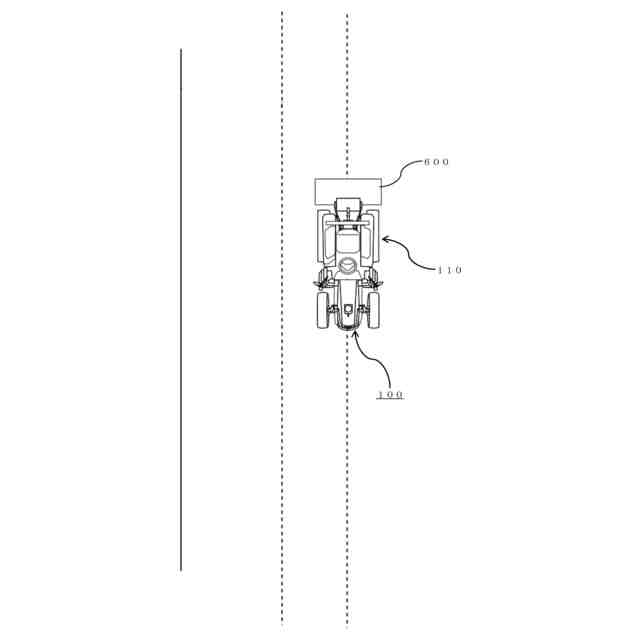
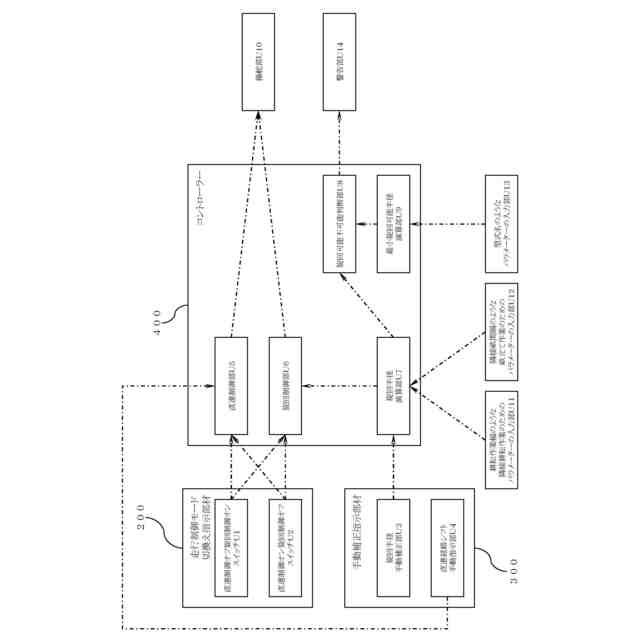
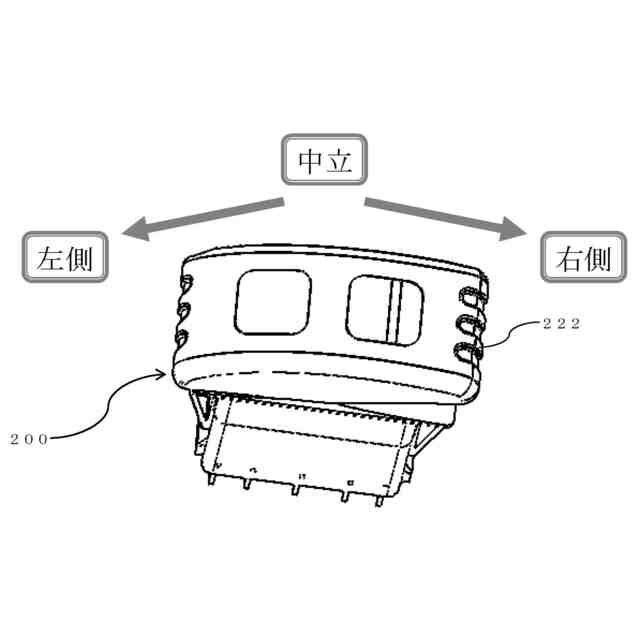
【解決手段】 複数の平行な直線経路に沿って走行するトラクターであって、車体100が直線経路に沿って直進させられる直進制御モードと、車体100が直線経路から直線経路への移行のために旋回させられる旋回制御モードと、の間での走行制御モード切換えの指示を行う走行制御モード切換え指示部材200と、走行制御モード切換え指示部材200により行われた指示に応じて、直進制御モードまたは旋回制御モードで走行制御を行うコントローラー400と、を備えており、直進制御モードから旋回制御モードへの走行制御モード切換えの指示が行われたとき、旋回が最小旋回可能半径を下回らない所定の旋回半径で行われるように、コントローラー400は車体100を旋回させる走行制御を行うトラクターである。
【選択図】 図1
特許請求の範囲
【請求項1】
複数の平行な直線経路に沿って走行する作業車両であって、
車体が直線経路に沿って直進させられる直進制御モードと、前記車体が直線経路から直線経路への移行のために旋回させられる旋回制御モードと、の間での走行制御モード切換えの指示を行う走行制御モード切換え指示部材と、
前記走行制御モード切換え指示部材により前記行われた指示に応じて、前記直進制御モードまたは前記旋回制御モードで走行制御を行うコントローラーと、
を備えており、
前記直進制御モードから前記旋回制御モードへの走行制御モード切換えの指示が行われたとき、旋回が最小旋回可能半径を下回らない所定の旋回半径で行われるように、前記コントローラーは前記車体を旋回させる走行制御を行うことを特徴とする作業車両。
続きを表示(約 700 文字)
【請求項2】
前記走行制御モード切換え指示部材は、車体左右方向を基準としたステアリングホイールの左側または右側へ突出している、前記ステアリングホイールの下方へ設けられたレバーを有し、
前記車体左右方向を基準とした前記コントローラーへの旋回向き選択の指示は、前記レバーのレバー操作向きを利用して行われることを特徴とする請求項1に記載の作業車両。
【請求項3】
前記直進制御モードまたは前記旋回制御モードで行われている走行制御における手動補正の指示を行う手動補正指示部材を備えていることを特徴とする請求項2に記載の作業車両。
【請求項4】
前記コントローラーは、入力された旋回半径パラメーターに基づいて前記所定の旋回半径を算出することを特徴とする請求項3に記載の作業車両。
【請求項5】
前記算出された所定の旋回半径が前記最小旋回可能半径を下回る場合においては、前記コントローラーは警告を出力することを特徴とする請求項4に記載の作業車両。
【請求項6】
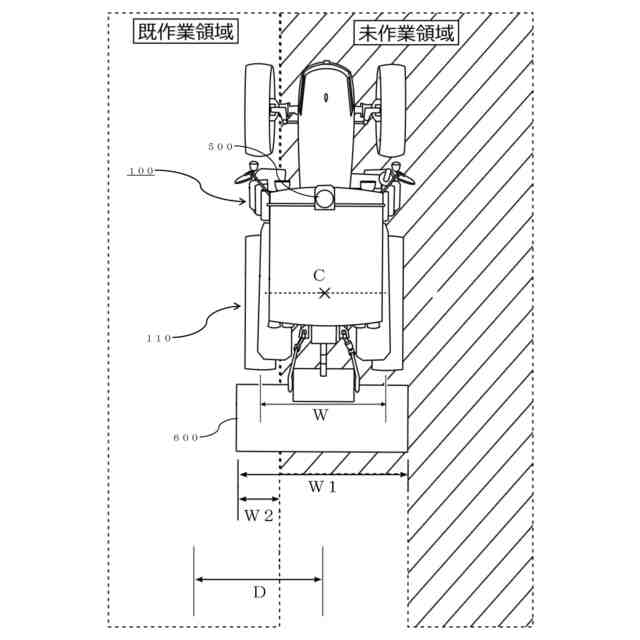
隣接耕耘作業が行われる場合においては、前記旋回半径パラメーターは耕耘作業幅および耕耘作業ラップ幅であり、前記所定の旋回半径の値は前記耕耘作業ラップ幅の値を前記耕耘作業幅の値から減算することにより得られた値の半分の値であることを特徴とする請求項5に記載の作業車両。
【請求項7】
畝立て作業が行われる場合においては、前記旋回半径パラメーターは隣接畝間隔であり、前記所定の旋回半径の値は前記隣接畝間隔の値の半分の値であることを特徴とする請求項5に記載の作業車両。
発明の詳細な説明
【技術分野】
【0001】
本発明は、トラクターのような作業車両に関する。
続きを表示(約 1,200 文字)
【背景技術】
【0002】
トラクターのような作業車両が、知られている(たとえば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
特開2022-95323号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、本発明者は、作業車両ユーザーのさまざまなニーズを考慮し、便利な機能がかくの如き作業車両へつぎつぎと実装される趨勢はますます加速すると考えている。
【0005】
しかしながら、上述された従来のトラクターのような作業車両については、便利な機能を利用するときの使い勝手が必ずしもよくないことに本発明者は気付いた。
【0006】
本発明は、上述された従来の課題を考慮し、使い勝手を向上することができる作業車両を提供することを目的とする。
【課題を解決するための手段】
【0007】
第1の本発明は、複数の平行な直線経路に沿って走行する作業車両であって、
車体が直線経路に沿って直進させられる直進制御モードと、前記車体が直線経路から直線経路への移行のために旋回させられる旋回制御モードと、の間での走行制御モード切換えの指示を行う走行制御モード切換え指示部材と、
前記走行制御モード切換え指示部材により前記行われた指示に応じて、前記直進制御モードまたは前記旋回制御モードで走行制御を行うコントローラーと、
を備えており、
前記直進制御モードから前記旋回制御モードへの走行制御モード切換えの指示が行われたとき、旋回が最小旋回可能半径を下回らない所定の旋回半径で行われるように、前記コントローラーは前記車体を旋回させる走行制御を行うことを特徴とする作業車両である。
【0008】
これにより、直進制御モードから旋回制御モードへの走行制御モード切換えの指示が行われたとき、旋回が最小旋回可能半径を下回らない所定の旋回半径で行われるように、コントローラーは車体を旋回させる走行制御を行うので、使い勝手を向上することができる。
【0009】
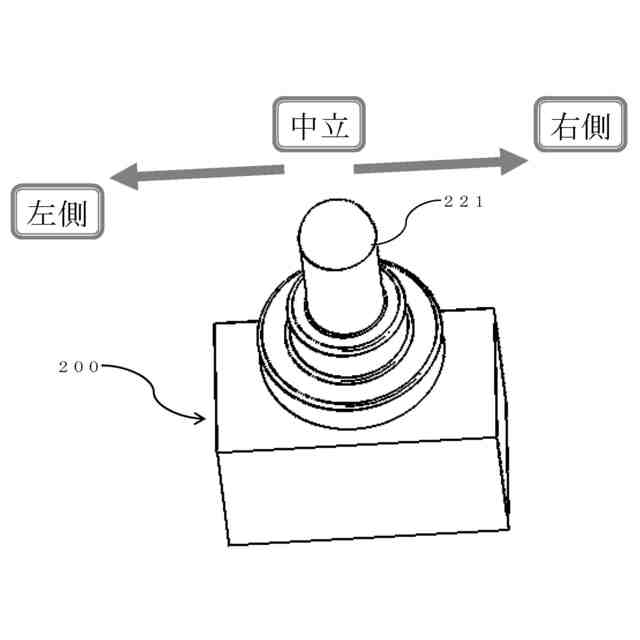
第2の本発明は、前記走行制御モード切換え指示部材は、車体左右方向を基準としたステアリングホイールの左側または右側へ突出している、前記ステアリングホイールの下方へ設けられたレバーを有し、
前記車体左右方向を基準とした前記コントローラーへの旋回向き選択の指示は、前記レバーのレバー操作向きを利用して行われることを特徴とする第1の本発明の作業車両である。
【0010】
これにより、車体左右方向を基準としたコントローラーへの旋回向き選択の指示は、レバーのレバー操作向きを利用して行われるので、使い勝手をさらに向上することができる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
井関農機株式会社
作業機
1か月前
井関農機株式会社
収穫機
12日前
井関農機株式会社
作業機
13日前
井関農機株式会社
作業車両
今日
井関農機株式会社
作業車両
26日前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
苗移植機
1か月前
井関農機株式会社
苗移植機
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
2か月前
井関農機株式会社
苗移植機
22日前
井関農機株式会社
苗移植機
22日前
井関農機株式会社
作業車両
12日前
井関農機株式会社
コンバイン
1か月前
井関農機株式会社
コンバイン
1か月前
井関農機株式会社
コンバイン
1か月前
井関農機株式会社
コンバイン
1か月前
井関農機株式会社
収穫作業機
1か月前
井関農機株式会社
コンバイン
12日前
井関農機株式会社
コンバイン
1か月前
井関農機株式会社
穀粒乾燥機
1か月前
井関農機株式会社
乗用芝刈機
1か月前
井関農機株式会社
コンバイン
14日前
井関農機株式会社
コンバイン
14日前
井関農機株式会社
乗用芝刈機
12日前
井関農機株式会社
歩行型管理機
1か月前
井関農機株式会社
植物栽培設備
1か月前
井関農機株式会社
植物栽培設備
1か月前
井関農機株式会社
植物栽培設備
2か月前
井関農機株式会社
乗用型苗移植機
1か月前
井関農機株式会社
乗用作業車の操縦装置
26日前
井関農機株式会社
電動作業車の安全装置
26日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ