TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024142840
公報種別
公開特許公報(A)
公開日
2024-10-11
出願番号
2023055194
出願日
2023-03-30
発明の名称
収穫作業機
出願人
井関農機株式会社
代理人
個人
,
個人
主分類
A01D
67/00 20060101AFI20241003BHJP(農業;林業;畜産;狩猟;捕獲;漁業)
要約
【課題】従来、収穫作業機では完全に平坦にはなり得ない圃場内での作業走行が強いられ、作業走行をする際、機体は地面に合わせて前後または左右に傾斜することがある。
【解決手段】収穫装置4の後方で走行支持フレーム1の上方には収穫装置4で収穫した作物を調製処理する調整装置3を設け、調整装置3の近傍に収穫物を回収する回収部5を設け、走行支持フレーム1の上方所定位置には、走行装置2と収穫装置4と調整装置3等を駆動するアクチュエータ10を設け、このアクチュエータ10に給電するバッテリー11を備える収穫作業機において、搭載したバッテリー11の位置を移動させて重心を変更するバッテリ移動台12を設け、バッテリ移動台12は、走行装置2を支持する走行支持フレーム1が形成する空間部13内に、前後または左右方向に移動可能に配置されることを特徴とする収穫作業機。
【選択図】 図9
特許請求の範囲
【請求項1】
走行支持フレーム(1)の下方に走行装置(2)を設け、走行装置(2)の前方に圃場の作物を収穫する収穫装置(4)を設け、収穫装置(4)の後方で走行支持フレーム(1)の上方には収穫装置(4)で収穫した作物を調製処理する調整装置(3)を設け、調整装置(3)の近傍に収穫物を回収する回収部(5)を設け、前記走行支持フレーム(1)の上方所定位置には、前記走行装置(2)と収穫装置(4)と調整装置(3)等を駆動するアクチュエータ(10)を設け、このアクチュエータ(10)に給電するバッテリー(11)を備える収穫作業機において、搭載したバッテリー(11)の位置を移動させて重心を変更するバッテリ移動台(12)を設け、バッテリ移動台(12)は、走行装置(2)を支持する走行支持フレーム(1)が形成する空間部(13)内に、前後または左右方向に移動可能に配置されることを特徴とする収穫作業機。
続きを表示(約 1,900 文字)
【請求項2】
前記収穫装置(4)は機体左右一側寄りに配置し、前記回収部(5)は機体左右他側寄りに配置し、収穫物を回収し収容する回収部(5)に、収穫物の収容量を検出する収量センサ(15)を設け、収量センサ(15)が回収部(5)の所定量以上の収穫物の収容を検出すると、回収部(5)を備える側に重量バランスが偏っていると判定し、バッテリ移動台(12)を移動させることを特徴とする請求項1に記載の収穫作業機。
【請求項3】
バッテリ移動台(12)は、移動アクチュエータ(16)を備えると共に、バッテリ移動台(12)の移動をアシストすると共にズレやメカロックを防止する移動ガイド体(17)を設けたことを特徴とする請求項1または2に記載の収穫作業機。
【請求項4】
移動アクチュエータ(16)は、バッテリ移動台(12)を機体左右方向に移動させる配置とし、走行支持フレーム(1)上に左右の左右傾斜センサ(20)を各々設け、左右の左右傾斜センサ(20)のうち、より上方に検知された側にバッテリ移動台(12)を移動させるように移動アクチュエータ(16)を作動させる構成としたことを特徴とする請求項3に記載の収穫作業機。
【請求項5】
移動アクチュエータ(16)は、バッテリ移動台(12)を機体前後方向に移動させる配置とし、走行支持フレーム(1)の左右中央部で且つ機体後方寄りに前後傾斜センサ(21)を設け、前後傾斜センサ(21)の検出角度に合わせて移動アクチュエータ(16)を作動させる構成としたことを特徴とする請求項3に記載の収穫作業機。
【請求項6】
移動アクチュエータ(16)は、バッテリ移動台(12)を左右方向に移動させる左右移動アクチュエータ(16A)と、バッテリ移動台(12)を前後方向に移動させる前後移動アクチュエータ(16B)を各々設け、バッテリ移動台(12)は、左右移動アクチュエータ(16A)の作動により左右に移動する左右ラック機構(22)と、前後移動アクチュエータ(16B)の作動により前後に移動する前後ラック機構(23)を備え、収穫装置(4)の前側で機体上下位置変更可能に設けられる収穫装置(4A)の上下位置を検出する上下検知部材(24)と、左右の左右傾斜センサ(20)及び前後傾斜センサ(21)を設け、上下検知部材(24)が、収穫装置(4A)が上昇位置にあると判定したときや、前後傾斜センサ(21)が機体の前後傾斜を検出したときには、前後移動アクチュエータ(16)を作動させ、収量センサ(15)が穀物の一定以上の収容を検出したときや、左右の左右傾斜センサ(20)が機体の左右傾斜を検出したときには、左右移動アクチュエータ(16A)を作動させることを特徴とする請求項3に記載の収穫作業機。
【請求項7】
回収部(5)にサブバッテリー(11A)を備え、回収部(5)は機体左右一側に着脱可能な構成とし、回収部(5)には、電池残量を示す表示部(26)を設けたことを特徴とする請求項1から3のいずれか1項に記載の収穫作業機。
【請求項8】
収穫作業機の走行支持フレーム(1)の下方に走行装置(2)を設け、走行装置(2)の前方に圃場の作物を収穫する収穫装置(4)を設け、収穫装置(4)の後方で走行支持フレーム(1)の上方には収穫装置(4)で収穫した作物を調製処理する調整装置(3)を設け、調整装置(3)の近傍に収穫物を回収する回収部(5)を設け、前記走行支持フレーム(1)は、前後方向の前後フレーム(28)と左右方向の左右フレーム(29)を複数有して構成し、前記走行装置(2)と収穫装置(4)と調整装置(3)等の各部を駆動するアクチュエータ(10)に給電するバッテリー(11)を、前記走行支持フレーム(1)の複数ある前後フレーム(28)のうちの左右両外側に配置した前後フレーム(28A)間であって、前記調整装置(3)と回収部(5)の下方位置を、左右方向に移動自在に設けたことを特徴とする収穫作業機。
【請求項9】
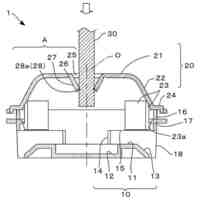
前記走行支持フレーム(1)の所定の前後一対の左右フレーム(29)は、断面「コ」型形状に形成して移動溝(30)を設け、前後一対の左右フレーム(29)の各移動溝(30)は相対峙させて配置し、移動溝(30)にはバッテリー(11)のバッテリ移動台(12)の前後両側にそれぞれ設けたロ-ラ(31)を転動自在に嵌合させたことを特徴とする請求項8に記載の収穫作業機。
【請求項10】
バッテリー(11)およびバッテリ移動台(12)の上面は、左右フレーム(29)の上面と同じか下方に配置したことを特徴とする請求項9に記載の収穫作業機。
発明の詳細な説明
【技術分野】
【0001】
本発明は、走行装置と収穫装置と調整装置と回収部を備えた収穫作業機に係るものである。
続きを表示(約 8,900 文字)
【背景技術】
【0002】
先行特許文献1に示すコンバインには、電装系の電源となるバッテリーを、充電や交換のための着脱が容易である位置に配置することで、充電や交換作業に要する時間や労力を軽減するものが示されている。
また、先行特許文献2に示すコンバインには、機体の一部、または全体の駆動源である電動モータを含めての電源となるバッテリーを備え、電動モータ等が過負荷で故障することを防止すべく、通電を制御するものが示されている。
【先行技術文献】
【特許文献】
【0003】
特開2020-65505号公報
特開2020-99218号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
従来の収穫作業機では完全に平坦にはなり得ない圃場内での作業走行が強いられ、作業走行をする際、機体は地面に合わせて前後または左右に傾斜することがある。また、穀稈の収穫作業中は、グレンタンク内に穀粒が逐次回収されるので、重量バランスが機体左右一側、さらには後方寄りになることがある。
左右方向の傾斜では、機体の進路がズレて刈り残される作物が発生すると共に、機体左右方向で穀稈の刈り高さが異なり、一方では切り株が走行を妨げ得る高さで残ると共に、他方では分草体等が地面に接近し過ぎて、地面との接触で汚れる、あるいは破損する問題が生じる。
前後方向の傾斜では、穀稈の刈り高さが高くなれば走行に支障がでる丈の高い切株が圃場に残され、低くなると刈刃や分草体が地面にめり込み、破損する問題がある。
上記の先行特許文献では、作業者の搭乗が前提であり、機体バランスの偏りは作業者の操作によってある程度補助できるためか、機体のバランスを自動的に安定させる構成は開示されていない。
上記の問題は、有人機では大きな問題ではないかもしれないが、ロボットコンバインを実現するにあたっては、頻繁に警告やエラーを発信することになり、ロボット化によりかえって作業精度を低下させると共に、作業に要する人的な労力の削減に繋がらなくなる問題がある。
本願は、圃場内での収穫作業機の走行および作業の安定化を図るものである。
【課題を解決するための手段】
【0005】
請求項1の発明は、走行支持フレーム1の下方に走行装置2を設け、走行装置2の前方に圃場の作物を収穫する収穫装置4を設け、収穫装置4の後方で走行支持フレーム1の上方には収穫装置4で収穫した作物を調製処理する調整装置3を設け、調整装置3の近傍に収穫物を回収する回収部5を設け、前記走行支持フレーム1の上方所定位置には、前記走行装置2と収穫装置4と調整装置3等を駆動するアクチュエータ10を設け、このアクチュエータ10に給電するバッテリー11を備える収穫作業機において、搭載したバッテリー11の位置を移動させて重心を変更するバッテリ移動台12を設け、バッテリ移動台12は、走行装置2を支持する走行支持フレーム1が形成する空間部13内に、前後または左右方向に移動可能に配置されることを特徴とする収穫作業機としたものである。
請求項2の発明は、前記収穫装置4は機体左右一側寄りに配置し、前記回収部5は機体左右他側寄りに配置し、収穫物を回収し収容する回収部5に、収穫物の収容量を検出する収量センサ15を設け、収量センサ15が回収部5の所定量以上の収穫物の収容を検出すると、回収部5を備える側に重量バランスが偏っていると判定し、バッテリ移動台12を移動させることを特徴とする請求項1に記載の収穫作業機としたものである。
請求項3の発明は、バッテリ移動台12は、移動アクチュエータ16を備えると共に、バッテリ移動台12の移動をアシストすると共にズレやメカロックを防止する移動ガイド体17を設けたことを特徴とする請求項1または2に記載の収穫作業機としたものである。
請求項4の発明は、移動アクチュエータ16は、バッテリ移動台12を機体左右方向に移動させる配置とし、走行支持フレーム1上に左右の左右傾斜センサ20を各々設け、左右の左右傾斜センサ20のうち、より上方に検知された側にバッテリ移動台12を移動させるように移動アクチュエータ16を作動させる構成としたことを特徴とする請求項3に記載の収穫作業機としたものである。
請求項5の発明は、移動アクチュエータ16は、バッテリ移動台12を機体前後方向に移動させる配置とし、走行支持フレーム1の左右中央部で且つ機体後方寄りに前後傾斜センサ21を設け、前後傾斜センサ21の検出角度に合わせて移動アクチュエータ16を作動させる構成としたことを特徴とする請求項3に記載の収穫作業機としたものである。
請求項6の発明は、移動アクチュエータ16は、バッテリ移動台12を左右方向に移動させる左右移動アクチュエータ16Aと、バッテリ移動台12を前後方向に移動させる前後移動アクチュエータ16Bを各々設け、バッテリ移動台12は、左右移動アクチュエータ16Aの作動により左右に移動する左右ラック機構22と、前後移動アクチュエータ16Bの作動により前後に移動する前後ラック機構23を備え、収穫装置4の前側で機体上下位置変更可能に設けられる収穫装置4Aの上下位置を検出する上下検知部材24と、左右の左右傾斜センサ20及び前後傾斜センサ21を設け、上下検知部材24が、収穫装置4Aが上昇位置にあると判定したときや、前後傾斜センサ21が機体の前後傾斜を検出したときには、前後移動アクチュエータ16を作動させ、収量センサ15が穀物の一定以上の収容を検出したときや、左右の左右傾斜センサ20が機体の左右傾斜を検出したときには、左右移動アクチュエータ16Aを作動させることを特徴とする請求項3に記載の収穫作業機としたものである。
請求項7の発明は、回収部5にサブバッテリー11Aを備え、回収部5は機体左右一側に着脱可能な構成とし、回収部5には、電池残量を示す表示部26を設けたことを特徴とする請求項1から3のいずれか1項に記載の収穫作業機としたものである。
請求項8の発明は、収穫作業機の走行支持フレーム1の下方に走行装置2を設け、走行装置2の前方に圃場の作物を収穫する収穫装置4を設け、収穫装置4の後方で走行支持フレーム1の上方には収穫装置4で収穫した作物を調製処理する調整装置3を設け、調整装置3の近傍に収穫物を回収する回収部5を設け、前記走行支持フレーム1は、前後方向の前後フレーム28と左右方向の左右フレーム29を複数有して構成し、前記走行装置2と収穫装置4と調整装置3等の各部を駆動するアクチュエータ10に給電するバッテリー11を、前記走行支持フレーム1の複数ある前後フレーム28のうちの左右両外側に配置した前後フレーム28A間であって、前記調整装置3と回収部5の下方位置を、左右方向に移動自在に設けたことを特徴とする収穫作業機としたものである。
請求項9の発明は、前記走行支持フレーム1の所定の前後一対の左右フレーム29は、断面「コ」型形状に形成して移動溝30を設け、前後一対の左右フレーム29の各移動溝30は相対峙させて配置し、移動溝30にはバッテリー11のバッテリ移動台12の前後両側にそれぞれ設けたロ-ラ31を転動自在に嵌合させたことを特徴とする収穫作業機としたものである。
請求項10の発明は、バッテリー11およびバッテリ移動台12の上面は、左右フレーム29の上面と同じか下方に配置したことを特徴とする収穫作業機としたものである。
【発明の効果】
【0006】
請求項1の発明では、走行装置2と収穫装置4と調整装置3と回収部5を有し、前記走行装置2と収穫装置4と調整装置3等の各部をアクチュエータ10で駆動し、アクチュエータ10にバッテリー11から給電する構成とし、積載したバッテリー11の位置を移動させて重心位置を変更するバッテリ移動台12を設け、バッテリ移動台12は、走行装置走行装置2を支持する走行支持フレーム1が形成する空間部13内に、前後または左右方向に移動可能に配置しているので、バッテリ移動台12を前後、左右方向に移動可能に設けることにより、圃場の傾斜や収穫物の回収量により機体のバランスが崩れても、バッテリ移動台12を移動させて安定状態を保たせることができ、作物の刈取ミス(進路ズレによる刈り残しや、刈高さが乱れて丈の高い切株が圃場に残される、等)の発生が防止することができ、また、走行支持フレーム1が形成する空間部13内にバッテリ移動台12を配置することにより、移動するバッテリー11が収穫装置4や回収部5等に接触することを防止できると共に、バッテリー11が機体の前後または左右に偏った位置に移動することを防止できる。
請求項2の発明では、収穫装置4は(大部分を)機体左右一側寄りに配置し、回収部5は機体左右他側寄りに配置し、収穫物を回収し収容する回収部5に、収穫物の収容量を検出する収量センサ15を設け、収量センサ15が回収部5の所定量以上の収穫物の収容を検出すると、回収部5を備える側に重量バランスが偏っていると判定し、バッテリ移動台12を移動させるので、回収部5を備える側に重量バランスが偏ることを防止でき、機体の進行方向にズレが生じることや、機体が左右傾斜して収穫物の収穫高さが機体左右で異なることが防止することができる。
請求項3の発明では、バッテリ移動台12は、(前後・左右の何れか一辺に)移動アクチュエータ16を備えると共に、バッテリ移動台12の移動をアシストすると共にズレやメカロックを防止する移動ガイド体17を設けているので、移動ガイド体17により、バッテリ移動台12の姿勢が移動中に乱れて定位置からズレた状態で停止することを防止でき、バッテリー11位置がズレて重量バランスが不安定なまま作業が継続されることが防止される。
バッテリ移動台12が移動経路に引っ掛かり、進退できなくなることが防止されるので、バッテリ移動台12の位置修正のために作業者が圃場に呼ばれる頻度を抑えることができる。
請求項4の発明では、移動アクチュエータ16は、バッテリ移動台12を機体左右方向に移動させる配置とし、走行支持フレーム1上に左右の左右傾斜センサ20を各々設け、左右の左右傾斜センサ20のうち、より上方に検知された側にバッテリ移動台12を移動させるように移動アクチュエータ16を作動させる構成としているので、収穫物の重量による重量バランスの変動だけでなく、圃場の傾斜等により機体の重量バランスが乱れたときにも、バッテリ移動台12が自動的に移動して重量バランスの改善が図られるので、走行姿勢がズレて収穫物を刈り損なうことを防止できる。
左右の左右傾斜センサ20の検出値を用いることにより、傾斜方向の変動にも素早く対応できると共に、バッテリ移動台12の移動量の適正化が図られる。
請求項5の発明では、移動アクチュエータ16は、バッテリ移動台12を機体前後方向に移動させる配置とし、走行支持フレーム1の左右中央部で且つ機体後方寄りに前後傾斜センサ21を設け、前後傾斜センサ21の検出角度に合わせて移動アクチュエータ16を作動させるので、機体前後方向の傾斜角度に合わせてバッテリ移動台12を機体の前側または後側に移動させることにより、機体前側が浮き上がり、収穫物の収穫高さ(刈取高さ)が高くなることを防止できる。これにより、丈の長い切株が圃場に残りにくく、切株を踏むことで走行が妨げられることが防止される。
あるいは、機体前側が地面に沈み込み、収穫装置4の前部が圃場面と接触して破損することを防止できる。
なお、破損しないまでも、収穫物の収穫作業高さが低過ぎ、収穫物を刈らずに引き抜き、形の太い株元が搬送経路に詰まり、作業が中断されることを防止できる。
請求項6の発明では、移動アクチュエータ16は、バッテリ移動台12を左右方向に移動させる左右移動アクチュエータ16Aと、バッテリ移動台12を前後方向に移動させる前後移動アクチュエータ16Bを各々設け、バッテリ移動台12は、左右移動アクチュエータ16の作動により左右に移動する左右ラック機構22と、前後移動アクチュエータ16の作動により前後に移動する前後ラック機構23を備え、収穫装置4の前側で機体上下位置変更可能に設けられる収穫装置4Aの上下位置を検出する上下検知部材24と、左右の左右傾斜センサ20及び前後傾斜センサ21を設け、上下検知部材24が、収穫装置4Aが上昇位置にあると判定したときや、前後傾斜センサ21が機体の前後傾斜を検出したときには、前後移動アクチュエータ16を作動させ、収量センサ15が穀物の一定以上の収容を検出したときや、左右の左右傾斜センサ20が機体の左右傾斜を検出したときには、左右移動アクチュエータ16を作動させるので、機体の傾斜や、センサ系統の検出によりバッテリー11載置台を前後及び左右に移動可能に構成したことにより、進行方向のズレや収穫物の収穫高さのズレの発生を抑えられるので、後工程でやり直しの必要のない能率のよい作業が可能になる。
請求項7の発明では、回収部5にサブバッテリー11Aを備え、回収部5は機体左右一側に着脱可能な構成とし、回収部5には、電池残量を示す表示部26を設けているので、回収部5にサブバッテリー11Aの機能を備えることで、電源容量を増やすことができ、稼働時間の延長が図られる。
回収部5を着脱自在としたことにより、サブバッテリー11Aの残量が少ないときに収穫物の収容量が満杯であれば、サブバッテリー11Aは充電され、且つ収穫物の入っていない回収部5と取り換えることができるので、能率よく稼働時間の延長を図ることができる。
電池残量が表示されることにより、おおよそどの程度の作業時間が残っているかを判断できるので、回収部5の交換時期を想定しやすく、電池切れで停止してしまい、作業が中断されることが防止される。
請求項8の発明では、走行支持フレーム1は、前後方向の前後フレーム28と左右方向の左右フレーム29を複数有して構成し、前記走行装置2と収穫装置4と調整装置3等の各部を駆動するアクチュエータ10に給電するバッテリー11を、走行支持フレーム1の複数ある前後フレーム28のうちの左右両外側に配置した前後フレーム28A間であって、前記調整装置3と回収部5の下方位置を、左右方向に移動自在に設けているので、調整装置3と回収部5の下方を広くバッテリー11が左右に移動させることができ、バッテリー11の移動量を広くでき、重量バランスの修正を容易に行える。
請求項9の発明では、走行支持フレーム1の前後一対の左右フレーム29は、断面「コ」型形状に形成して移動溝30を設け、前後一対の左右フレーム29の各移動溝30は相対峙させて配置し、移動溝30にはバッテリー11のバッテリ移動台12の前後両側にそれぞれ設けたロ-ラ31を転動自在に嵌合させているので、バッテリー11を走行支持フレーム1の上下幅を利用して設置でき、調整装置3および回収部5と走行装置2との間のスペースを有効利用してバッテリー11を設置できる。
請求項10の発明では、バッテリー11およびバッテリ移動台12の上面は、左右フレーム29の上面と同じか下方に配置したので、バッテリー11を走行支持フレーム1の上下幅を利用して設置でき、調整装置3および回収部5と走行装置2との間のスペースを有効利用してバッテリー11を設置できると共に、バッテリー11の移動と走行装置2との干渉を回避できる。
【図面の簡単な説明】
【0007】
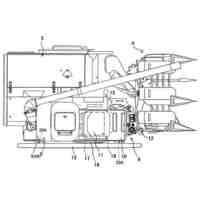
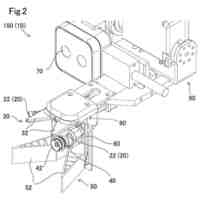
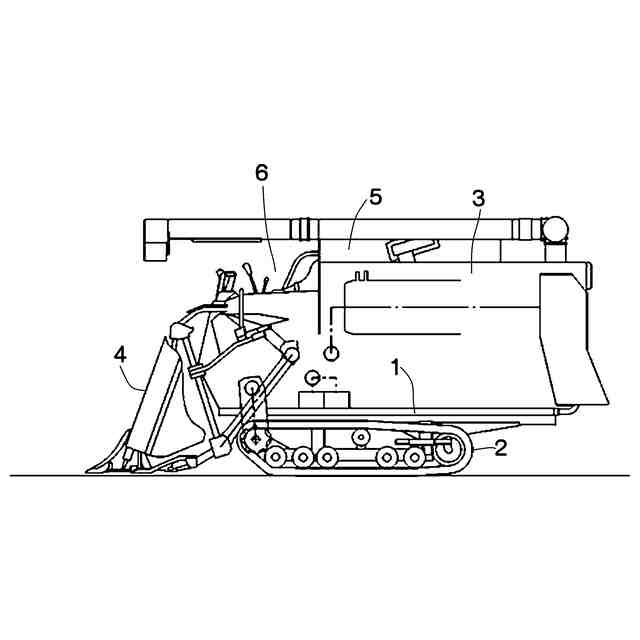
収穫作業機の側面図。
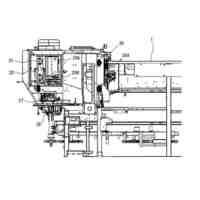
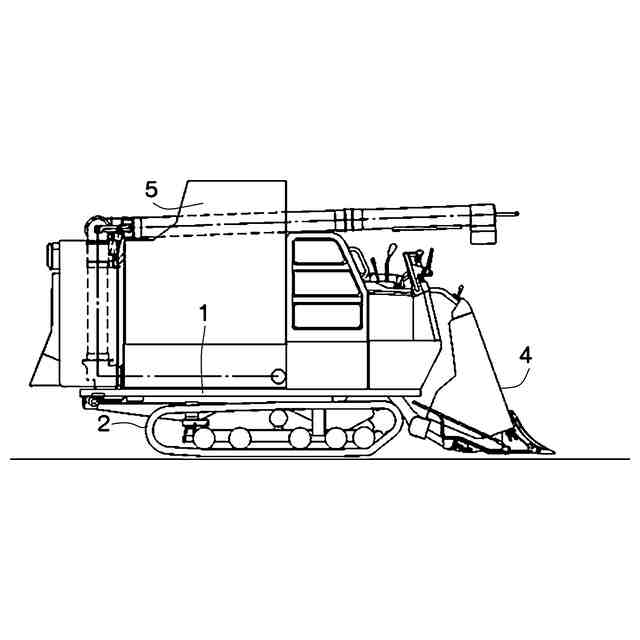
同側面図。
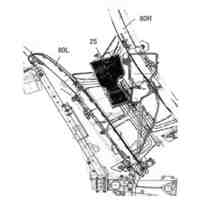
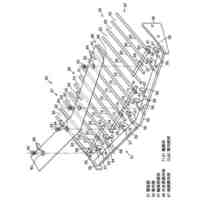
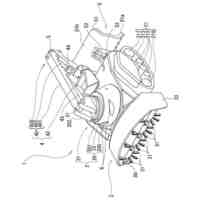
収穫装置と走行支持フレームの概略斜視図。
収穫作業機が傾斜した状態説明図。
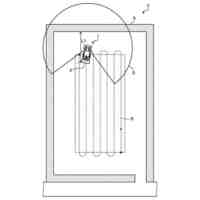
収穫作業機とバッテリーとの配置の概略説明背面図。
収穫作業機の重量バランスの変化状態を示す概略イメージ説明背面図。
回収装置に満了センサを設けた背面図。
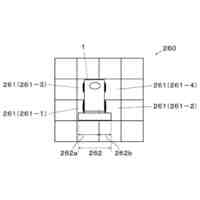
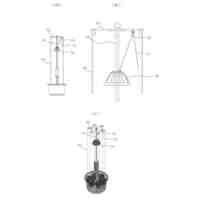
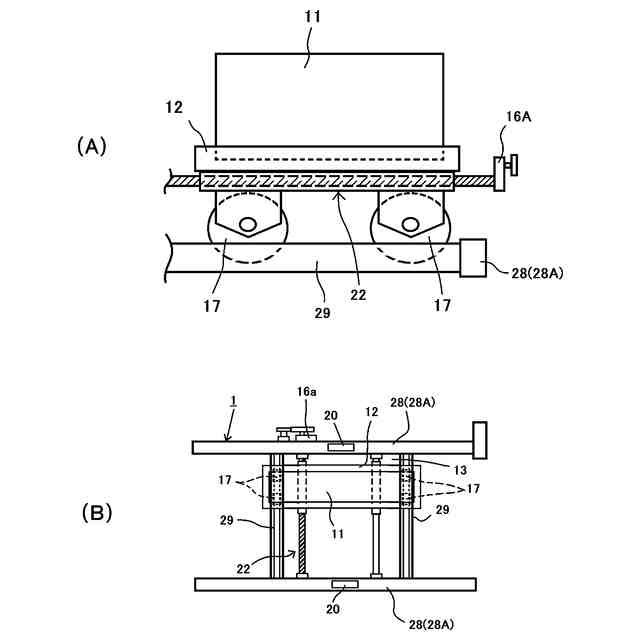
バッテリーの移動構成の一例を示す背面図および移動台の斜視図。
(A)移動台の背面図。 (B)移動台の平面図。
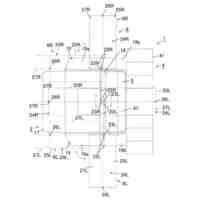
走行支持フレームの平面図。
走行支持フレームの平面図。
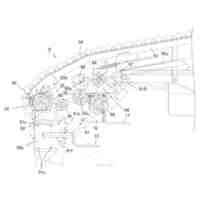
走行支持フレームとバッテリーの移動機構の平面図。
走行支持フレームとバッテリーの移動機構の他の実施形態の平面図。
走行支持フレームとバッテリーの移動機構の他の実施形態の平面図。
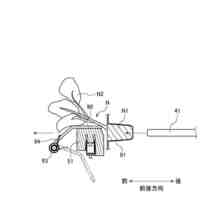
バッテリーの移動機構の一部拡大図。
走行支持フレームとバッテリーの移動機構の他の実施形態の平面図。
走行支持フレームとバッテリーの移動機構の他の実施形態の平面図。
走行支持フレームとバッテリーの移動機構の他の実施形態の平面図。
走行支持フレームとバッテリーの移動機構の他の実施形態の平面図。
走行支持フレームとバッテリーの移動機構の他の実施形態の平面図。
回収装置の概略背面図。
回収装置の概略背面図。
収穫作業機の側面図。
収穫作業機の他の実施形態側面図。
収穫作業機の他の実施形態概略平面図および概略背面図。
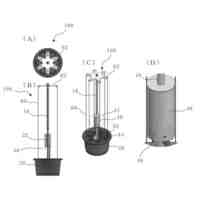
(A)燃料タンクの概略背面図。 (B)燃料タンクの他の実施形態の概略背面図。
走行支持フレームと走行装置の概略側面図。
【発明を実施するための形態】
【0008】
本発明の収穫作業機の一実施形態をコンバインの例にて図面により説明するが、収穫作業機は、例えば、にんじん収穫機でもよく、にんじん収穫作業機は、走行支持フレーム1の機体左右一側に、圃場に植生する人参などの根菜類の茎葉部を圃場面から引き起こす、正面視で反時計回り方向に引起しラグを周回させる横引起し装置と、横引起し装置で引き起こした茎葉部を後上方に掻き上げる縦引起し装置と、縦引起し装置が掻き上げて露出させた茎葉部の生え際を左右一対の弾性ベルトで挟持して圃場から引き抜き、機体後方へ搬送する引抜搬送装置を備え、この引抜搬送装置の搬送終端側には、根菜本体の上昇を規制しつつ、茎葉部は引抜搬送装置により更に上方に引っ張られる状態とする肩揃え装置を備え、この肩揃え装置で切断高さに揃えられた根菜から、茎葉部の生え際を狙って切除する茎葉切断刃を設けると共に、茎葉切断刃によって根菜から切り離された茎葉部を機体後方に排出する排葉搬送装置を配置する。
【0009】
そして、引抜搬送装置、肩揃え装置及び茎葉切断刃の下方には、落下する根菜を受けて機体左右一側から左右他側に搬送する残葉処理コンベアを配置し、この残葉処理コンベアには、搬送方向に斜交して独立して回転し、根菜本体に残された茎葉部を回転で引きちぎる残葉処理ローラを設けており、根菜は斜交姿勢の残葉処理ローラに沿って機体前側で且つ機体左右他側に搬送される。このとき、残葉処理ローラに引きちぎられて下方を通過した茎葉部は、残葉処理コンベアの機体他側端部から(圃場に)排出される。
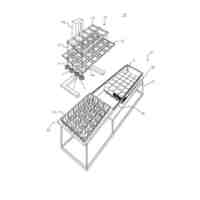
残葉処理コンベアの機体前側には、機体左右一側から左右他側に向かって根菜を搬送し、搬送中の根菜に付着した泥土を振動で落下させつつ、搬送途中で選別作業者が収穫に不適な根菜を目視で除去選別する選別搬送コンベアを配置する。この選別搬送コンベアの搬送終端側は、昇降シリンダによって昇降可能に構成されており、搬送終端部にはフレキシブルコンテナ等の収容部材を吊り下げ、選別搬送コンベアの終端部の上下回動位置と収容部材の落差をできるだけ小さくしつつ、選別搬送コンベアの終端部を上昇させると収容部材が上下方向に伸びて容量が増える構成としている。
【0010】
この収容容器は、選別搬送コンベアの搬送終端側の下方に設けられ、機体左右他側に部分的に突出する支持台に底部を受けられた状態であり、根菜の収穫量が多くなるほど重量が増加し、重量物を四角形状に配置して構成する根菜類収穫機の機体バランスを機体左右他側寄りに偏らせる要因である(一般的に満量時で200kg増加)。
さらには、引抜搬送装置の左右他側で、且つ選別搬送コンベアの機体前方には、機体操縦者が搭乗する作業座席と操縦部が配置され、作業座席の下方にはエンジンや燃料タンク、ラジエータ等の重量物が配置される。
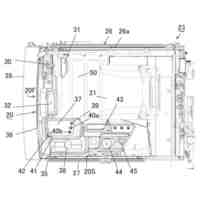
図において、1は収穫作業機の走行支持フレーム(機体フレーム)であり、走行支持フレーム1の下方に走行装置2を設け、走行装置2の前方に圃場の作物を収穫(刈取)する収穫装置(刈取装置)4を設け、収穫装置4の後方で走行支持フレーム1の上方には収穫装置4で収穫した作物を調製処理(脱穀)する調整装置3を設け、調整装置3の近傍に収穫物(穀粒等)を回収する回収部(グレンタンク)5を設け、回収部5と前記調整装置3との間に調整装置3が収穫した収穫物を回収部5に搬送回収する搬送回収部(揚穀螺旋等)7を設ける。6は操縦部、8は回収部5内の収穫物を排出する収穫物排出装置(排出オーガ)である。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
井関農機株式会社
精米設備
3日前
井関農機株式会社
作業車両
3日前
井関農機株式会社
作業車両
4日前
井関農機株式会社
作業車両
4日前
井関農機株式会社
作業車両
10日前
井関農機株式会社
収穫作業機
4日前
井関農機株式会社
コンバイン
10日前
井関農機株式会社
コンバイン
10日前
井関農機株式会社
コンバイン
10日前
井関農機株式会社
乗用型苗植機
10日前
井関農機株式会社
乗用型苗移植機
10日前
井関農機株式会社
多条植付用の苗移植機
4日前
井関農機株式会社
植物工場の生産流通システム
3日前
井関農機株式会社
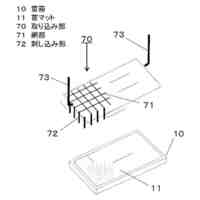
苗マット取り出し装置
12日前
個人
植裁物への水やり装置
10日前
井関農機株式会社
作業車両
4日前
タキイ種苗株式会社
レタス植物
18日前
株式会社ロッソ
植物栽培器
14日前
みのる産業株式会社
移植機
今日
みのる産業株式会社
移植機
今日
株式会社ロッソ
植物栽培器
14日前
株式会社大貴
動物用トイレ
3日前
松山株式会社
収穫機
3日前
株式会社東海化成
ポット保持具
24日前
個人
ルアー
18日前
三菱マヒンドラ農機株式会社
作業車両
4日前
三菱マヒンドラ農機株式会社
作業車両
3日前
井関農機株式会社
コンバイン
10日前
AGRIST株式会社
収穫装置
21日前
株式会社クボタ
作業機
11日前
みのる産業株式会社
苗箱および移植装置
今日
株式会社BARKS
ペット収容袋付衣類
11日前
井関農機株式会社
植物工場の生産流通システム
3日前
日本製紙クレシア株式会社
ペット用吸収性物品
11日前
株式会社吉野工業所
除虫用餌剤容器
4日前
大日本除蟲菊株式会社
薬剤揮散装置
18日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ