TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024119075
公報種別
公開特許公報(A)
公開日
2024-09-03
出願番号
2023025683
出願日
2023-02-22
発明の名称
作業車両
出願人
井関農機株式会社
代理人
個人
主分類
A01B
69/00 20060101AFI20240827BHJP(農業;林業;畜産;狩猟;捕獲;漁業)
要約
【課題】作業車両を圃場での走行経路に沿って精度よく走行させること。
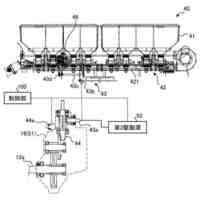
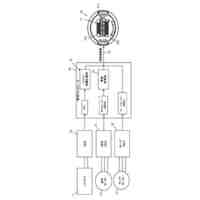
【解決手段】第1の計測手段(31)および第2の計測手段(41)の計測結果に基づいて、予め定められた走行経路(201)に沿って走行車体(1a)を走行させる走行制御手段(108)が、第1の計測手段(31)および第2の計測手段(41)の少なくとも一方の計測結果が予め定められた範囲を超える場合に、第2の計測手段(41)の計測結果に基づいて走行車体(1a)の進行方向(D)の制御を行うことで、作業車両を圃場での走行経路に沿って精度よく走行させることができる。
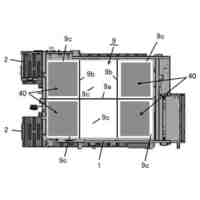
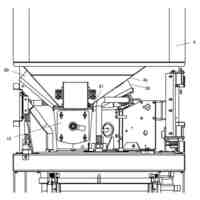
【選択図】図1
特許請求の範囲
【請求項1】
走行車体(1a)と、
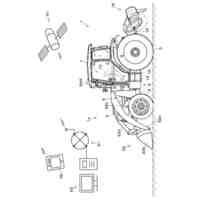
人工衛星との間の通信を利用して前記走行車体(1a)の位置を計測する第1の計測手段(31)と、
前記走行車体(1a)の姿勢を計測する第2の計測手段(41)と、
前記第1の計測手段(31)および前記第2の計測手段(41)の計測結果に基づいて、予め定められた走行経路(201)に沿って前記走行車体(1a)を走行させる走行制御手段(108)であって、前記第1の計測手段(31)および前記第2の計測手段(41)の少なくとも一方の計測結果が、予め定められた範囲を超える場合に、前記第2の計測手段(41)の計測結果に基づいて、前記走行車体(1a)の進行方向(D)の制御を行う前記走行制御手段(108)と、
を備えたことを特徴とする作業車両(1)。
続きを表示(約 1,100 文字)
【請求項2】
前記第2の計測手段(41)の計測結果において前記走行車体(1a)の進行方向に対する左右方向の傾斜が予め定められた範囲を超える場合に、前記走行車体(1a)の左右の傾斜に基づいて、前記走行車体(1a)の操舵時の制御量である操舵角を傾斜していない場合の操舵角に対して補正する前記走行制御手段(108)、
を備えたことを特徴とする請求項1に記載の作業車両(1)。
【請求項3】
前記走行車体(1a)の左右の傾斜に基づいて操舵角を補正する場合に、前記走行車体(1a)の右側の車輪と左側の車輪とで異なる操舵角にする前記走行制御手段(108)、
を備えたことを特徴とする請求項2に記載の作業車両(1)。
【請求項4】
前記第2の計測手段(41)の計測結果において前記走行車体(1a)の進行方向に対する前後方向の傾斜が予め定められた範囲を超える場合に、前記走行車体(1a)の前後の傾斜に基づいて、前記走行車体(1a)の操舵時の制御量である操舵角を前後方向に傾斜していない場合の操舵角に対して補正する前記走行制御手段(108)、
を備えたことを特徴とする請求項1に記載の作業車両(1)。
【請求項5】
前記予め定められた走行経路(201)に沿った走行制御を開始する場合に、前記走行経路(201)の進行方向(201a)に対する前記走行車体(1a)の進行方向(D)のズレ(θ)が、予め定められた範囲を超える場合に、前記ズレ(θ)が前記予め定められた範囲内になるまで、前記走行車体(1a)の左右方向の一方の車輪のブレーキを作動させる前記走行制御手段(108)、
を備えたことを特徴とする請求項1に記載の作業車両(1)。
【請求項6】
前記第1の計測手段(31)の計測結果において前記人工衛星との通信が不通になった場合に、前記走行車体(1a)の加速度に基づいて、前記走行車体(1a)の現在位置(P)と進行方向(D)を算出して、前記走行車体(1a)を走行させる前記走行制御手段(108)、
を備えたことを特徴とする請求項1に記載の作業車両(1)。
【請求項7】
前記走行車体(1a)の外部の停止物の撮像結果に基づいて、前記走行車体(1a)の現在位置(P3)および進行方向(D3)を計測する第3の計測手段(51,52)と、
前記第1の計測手段(31)の計測結果において前記人工衛星との通信が不通になった場合に、前記第2の計測手段(41)の計測結果と前記第3の計測手段(51,52)の計測結果とに基づいて、前記走行車体(1a)を走行させる前記走行制御手段(108)、
を備えたことを特徴とする請求項6に記載の作業車両(1)。
発明の詳細な説明
【技術分野】
【0001】
この発明は、トラクタやコンバイン、苗移植機、野菜収穫機等の作業車両に関し、特に、圃場内の所定を走行経路に沿って走行制御される作業車両に関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
トラクタやコンバイン、苗移植機、野菜収穫機等の作業車両において、傾斜センサを備え、傾斜異常を検出した場合に、機体を停車させたり、作業機を停止させたり、異常を検出した位置に応じて減速が異なるように制御したりする技術が知られている(特許文献1)。
【先行技術文献】
【特許文献】
【0003】
特開2022-85683号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1に記載の技術では、主に、作業車両が畔を越える際の傾斜を検出して速度調整を行うものであり、作業中の圃場内での微小な傾斜による対応をするための制御ではない。すなわち、特許文献1に記載の技術を、圃場内での微小な傾斜に適用した場合、圃場内での局所的な窪みや土の硬軟等に応じて作業車両が停止したり、作業機が停止したり、走行速度が変動することとなる。よって、作業時間が長くなったり、速度変動により作業の精度が変化したりする問題がある。
【0005】
本発明は、作業車両を圃場での走行経路に沿って精度よく走行させることを技術的課題とする。
【課題を解決するための手段】
【0006】
本発明の上記課題は次の解決手段により解決される。
請求項1に記載の発明は、走行車体(1a)と、人工衛星との間の通信を利用して前記走行車体(1a)の位置を計測する第1の計測手段(31)と、前記走行車体(1a)の姿勢を計測する第2の計測手段(41)と、前記第1の計測手段(31)および前記第2の計測手段(41)の計測結果に基づいて、予め定められた走行経路(201)に沿って前記走行車体(1a)を走行させる走行制御手段(108)であって、前記第1の計測手段(31)および前記第2の計測手段(41)の少なくとも一方の計測結果が、予め定められた範囲を超える場合に、前記第2の計測手段(41)の計測結果に基づいて、前記走行車体(1a)の進行方向(D)の制御を行う前記走行制御手段(108)と、を備えたことを特徴とする作業車両(1)である。
【0007】
請求項2に記載の発明は、前記第2の計測手段(41)の計測結果において前記走行車体(1a)の進行方向に対する左右方向の傾斜が予め定められた範囲を超える場合に、前記走行車体(1a)の左右の傾斜に基づいて、前記走行車体(1a)の操舵時の制御量である操舵角を傾斜していない場合の操舵角に対して補正する前記走行制御手段(108)を備えたことを特徴とする請求項1に記載の作業車両(1)である。
【0008】
請求項3に記載の発明は、前記走行車体(1a)の左右の傾斜に基づいて操舵角を補正する場合に、前記走行車体(1a)の右側の車輪と左側の車輪とで異なる操舵角にする前記走行制御手段(108)を備えたことを特徴とする請求項2に記載の作業車両(1)である。
【0009】
請求項4に記載の発明は、前記第2の計測手段(41)の計測結果において前記走行車体(1a)の進行方向に対する前後方向の傾斜が予め定められた範囲を超える場合に、前記走行車体(1a)の前後の傾斜に基づいて、前記走行車体(1a)の操舵時の制御量である操舵角を前後方向に傾斜していない場合の操舵角に対して補正する前記走行制御手段(108)を備えたことを特徴とする請求項1に記載の作業車両(1)である。
【0010】
請求項5に記載の発明は、前記予め定められた走行経路(201)に沿った走行制御を開始する場合に、前記走行経路(201)の進行方向(201a)に対する前記走行車体(1a)の進行方向(D)のズレ(θ)が、予め定められた範囲を超える場合に、前記ズレ(θ)が前記予め定められた範囲内になるまで、前記走行車体(1a)の左右方向の一方の車輪のブレーキを作動させる前記走行制御手段(108)を備えたことを特徴とする請求項1に記載の作業車両(1)である。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
井関農機株式会社
作業機
1か月前
井関農機株式会社
収穫機
9日前
井関農機株式会社
田植機
15日前
井関農機株式会社
収穫機
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
29日前
井関農機株式会社
作業車両
22日前
井関農機株式会社
作業車両
16日前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業装置
9日前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
9日前
井関農機株式会社
作業車両
9日前
井関農機株式会社
作業車両
9日前
井関農機株式会社
作業車両
4日前
井関農機株式会社
作業車両
9日前
井関農機株式会社
作業車両
9日前
井関農機株式会社
乗用芝刈機
1か月前
井関農機株式会社
コンバイン
16日前
井関農機株式会社
コンバイン
10日前
井関農機株式会社
コンバイン
1か月前
井関農機株式会社
歩行型管理機
9日前
井関農機株式会社
汎用コンバイン
10日前
井関農機株式会社
乗用型苗移植機
22日前
井関農機株式会社
炊飯用洗米装置
29日前
井関農機株式会社
農薬散布作業車
4日前
井関農機株式会社
営農管理システム
15日前
井関農機株式会社
作業管理システム
9日前
井関農機株式会社
作業機管理システム
10日前
井関農機株式会社
圃場の水位管理システム
23日前
井関農機株式会社
作業車両の管理システム
4日前
井関農機株式会社
作業車のクローラ走行装置
9日前
株式会社タイワ精機
精米設備
10日前
井関農機株式会社
ディーゼルエンジン作業車の排気浄化再生表示装置
15日前
続きを見る
他の特許を見る







 特許ウォッチ
特許ウォッチ