TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024133164
公報種別
公開特許公報(A)
公開日
2024-10-01
出願番号
2024110930,2023136427
出願日
2024-07-10,2021-11-15
発明の名称
作業車両
出願人
井関農機株式会社
代理人
主分類
B60R
11/02 20060101AFI20240920BHJP(車両一般)
要約
【課題】小物やアイテムを収納することができ、利便性が向上する作業車両を提供する。
【解決手段】走行車体と、前記走行車体に取り付けられた作業機と、前記走行車体の位置情報を取得する受信アンテナと、前記受信アンテナを支持するフレームと、前記受信アンテナを覆うアンテナカバーと、を備えた作業車両において、前記受信アンテナの下方に収納スペースを備え、前記収納スペースは前記フレームに固定され、前記受信アンテナに関する配線を前記フレームに沿って配策することを特徴とする作業車両。
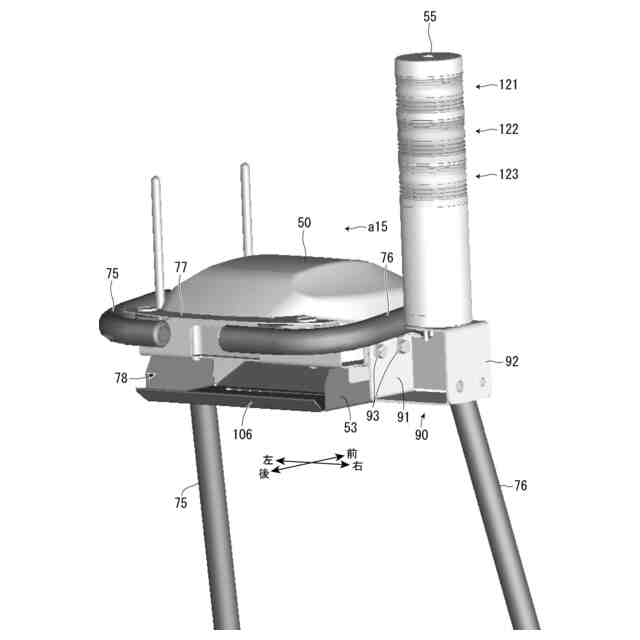
【選択図】図8
特許請求の範囲
【請求項1】
走行車体と、
前記走行車体に取り付けられた作業機と、
前記走行車体の位置情報を取得する受信アンテナと、
前記受信アンテナを支持するフレームと、
前記受信アンテナを覆うアンテナカバーと、を備えた作業車両において、
前記受信アンテナの下方に収納スペースを備えたことを特徴とする作業車両。
続きを表示(約 210 文字)
【請求項2】
前記収納スペースは前記フレームに固定され、
前記受信アンテナに関する配線を前記フレームに沿って配策することを特徴とする請求項1に記載の作業車両。
【請求項3】
前記収納スペースに位置情報用の端末を配置し、
前記端末用の配線の一部が配置され、
前記収納スペースに、電源を取り出すことができる電源供給部を配置したことを特徴とする請求項1または2に記載の作業車両。
発明の詳細な説明
【技術分野】
【0001】
本発明は、自動運転を行うことが可能な田植機、トラクターなどの農業用の作業車両に関するものである。
続きを表示(約 2,500 文字)
【背景技術】
【0002】
特許文献1には、ステアリングモータを駆動してステアリングホイールの舵角を調整し、自動運転を行うことが可能な作業車両が開示されている。以下、作業車両のことを単に「車両」ともいう。
【0003】
作業車両には、自動運転を行う間、特に、無人の状態で作業車両が自動運転を行う間に車両上にある小物やアイテムが収納できることが望ましい。
【先行技術文献】
【特許文献】
【0004】
特開2021-108595号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、作業者が機体を操縦する際には、フロアステップや、座席に小物やアイテム置くことはできるが、利便性が良くない。
【0006】
したがって、本発明は、小物やアイテムを収納することができ、利便性が向上する作業車両を提供することを目的とするものである。
【課題を解決するための手段】
【0007】
本発明のかかる目的は、
走行車体(2)と、前記走行車体(2)に取り付けられた作業機と、
前記走行車体(2)の位置情報を取得する受信アンテナ(130)と、
前記受信アンテナ(130)を支持するフレームと、
前記受信アンテナ(130)を覆うアンテナカバー(50)と、を備えた作業車両において、
前記受信アンテナ(130)の下方に収納スペースを備えたことを特徴とする作業車両。
【0008】
本発明によれば、状態表示灯を支持する支持部材が、受信アンテナの下方に収納スペースを備えたことで、アイテムや小物を収納できることで、利便性が向上する。
【発明の効果】
【0009】
本発明によれば、小物やアイテムを収納することができ、利便性が向上する。
【図面の簡単な説明】
【0010】
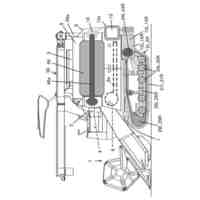
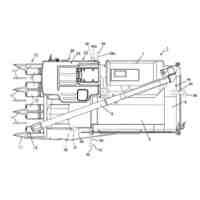
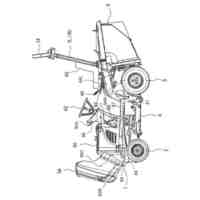
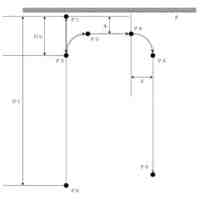
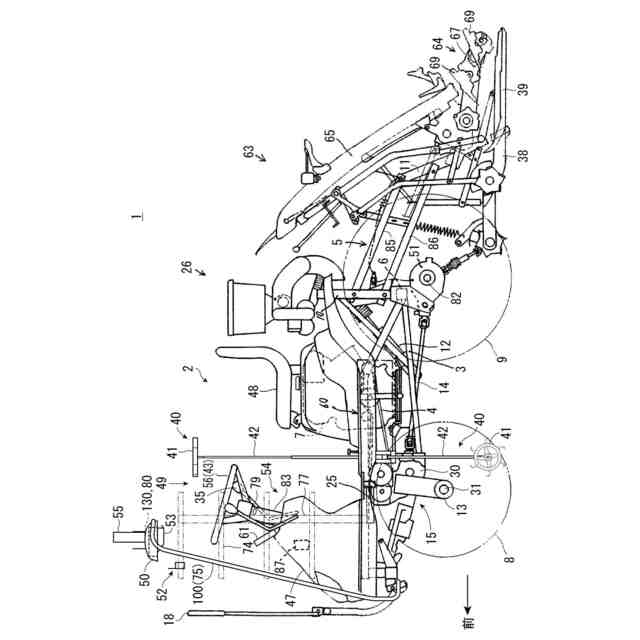
図1は、本発明の好ましい実施態様にかかる作業車両の模式的左側面図である。
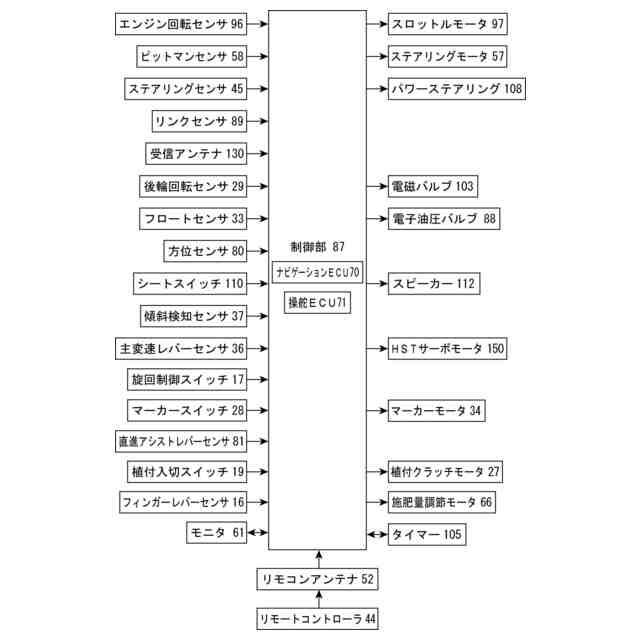
図2は、図1に示された作業車両のブロックダイアグラムである。
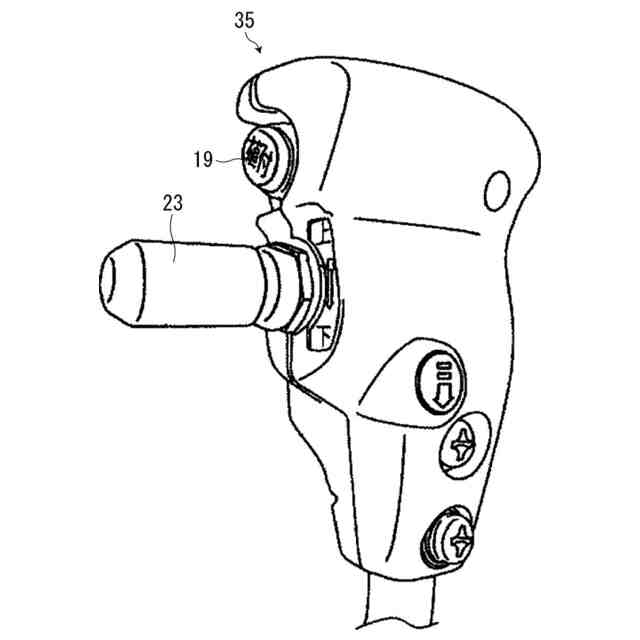
図3は、図1に示される主変速レバーの拡大図である。
図4は、作業車両を遠隔操作するリモートコントローラを示す図面である。
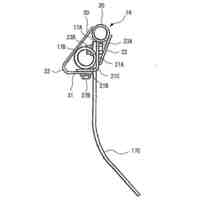
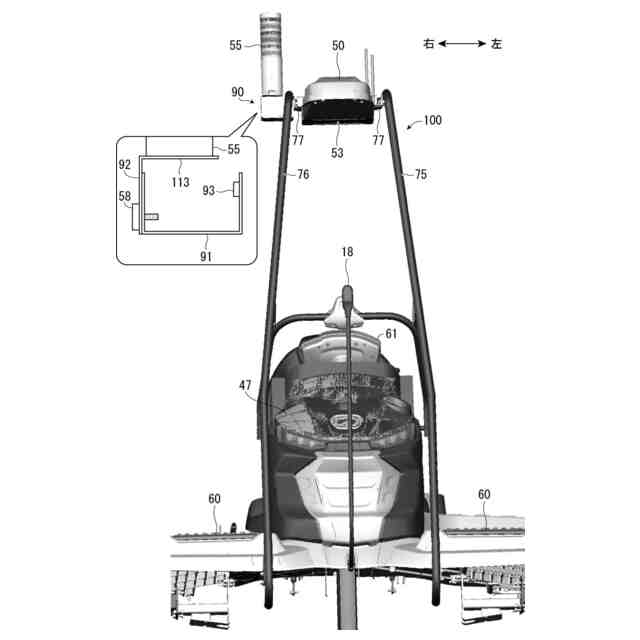
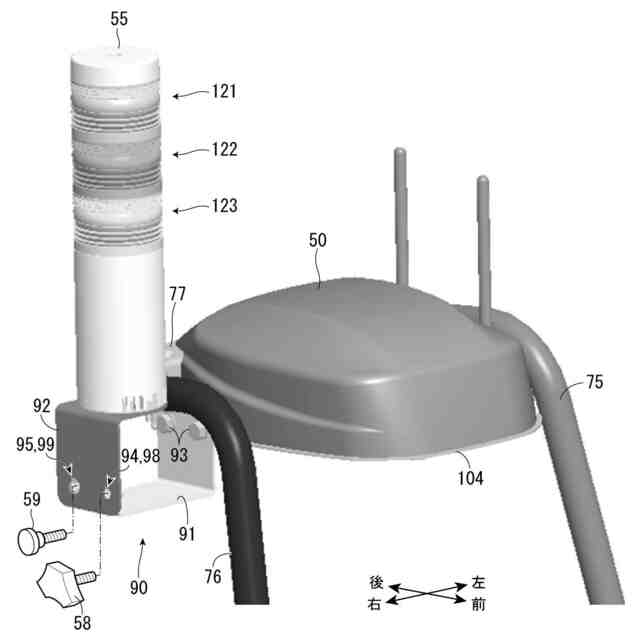
図5は、図1に示された状態表示灯の近傍の略正面図である。
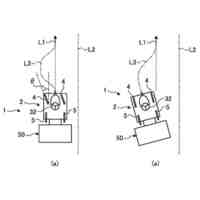
図6は、上下方向に延びる姿勢をとった状態表示灯の近傍の拡大斜視図である。
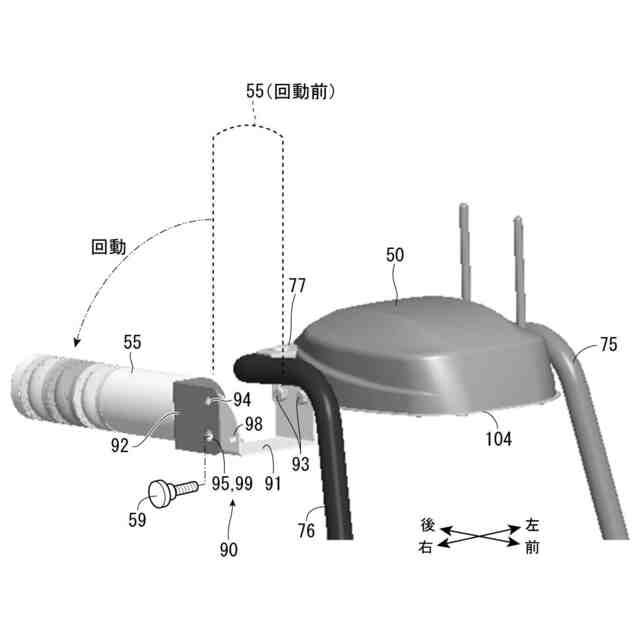
図7は、水平方向に延びる姿勢をとった状態表示灯の近傍の拡大斜視図である。
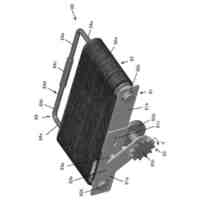
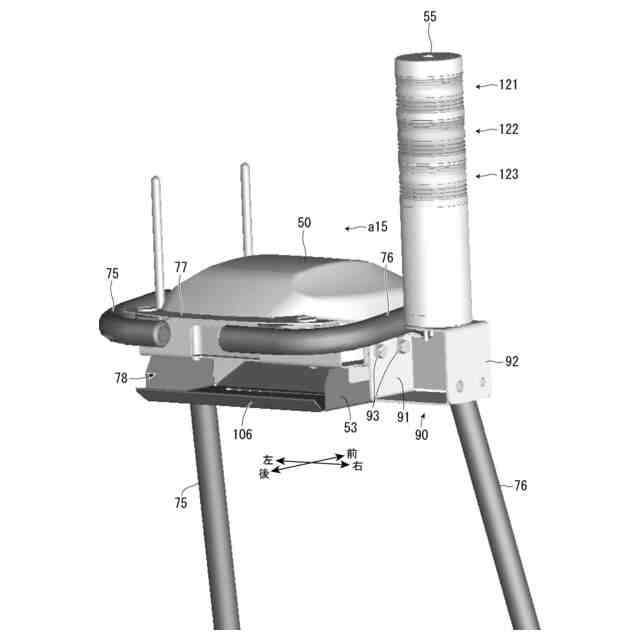
図8は、右斜め後方から見た状態表示灯の近傍の拡大斜視図である。
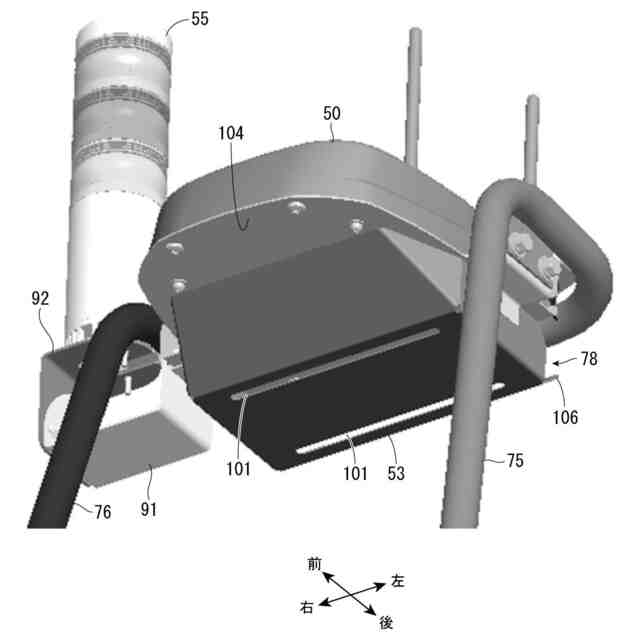
図9は、左前斜め下方から見た状態表示灯の近傍の拡大斜視図である。
図10は、図8に示された小物入れの内面を示す拡大斜視図である。
図11は、田植え作業の流れを示す図面である。
図12は、ティーチングの行程を示す図面である。
図13は、無人自動運転モードによる往復行程を示す図面である。
図14は、往復行程中の植え幅の自動調整を示す図面である。
図15は、無人自動運転モードによる内周行程を示す図面である。
図16は、操縦席への着座の有無により一時停止し又は報知する手順を示すフローチャートである。
図17(a)は、圃場進入口がない場合の退出方法を示す図面であり、図17(b)は、圃場進入口がある場合の退出方法を示す図面である。
図18は、前進退出する場合の第1ないし第4行程を示す図面である。
図19は、前進退出する場合の第5ないし第7行程を示す図面である。
図20は、前進退出する場合の第8ないし第11行程を示す図面である。
図21は、植え始め位置の調節を示す図面である。
図22は、除草剤の補給の手順を示す図面である。
図23は、変形田での作業を示す図面である。
図24は、ティーチング時の走行順序と往復植えの方向との関係を示す図面である。
図25(a)は、逆台形圃場での苗補給作業を示す図面であり、図25(b)は、軽微な逆台形圃場での苗補給作業を示す図面である。
図26(a)は、サブ経路の生成を示す図面であり、図26(b)は、サブ経路を生成しないための1つ目の対策を示す図面であり、図26(c)は、サブ経路を生成しないための2つ目の対策を示す図面である。
図27(a)は、往復行程を2分割する圃場においてサブ経路が生成される様子を示す図面であり、図27(b)は、図27(a)に示される圃場でサブ経路の生成を防止するティーチング経路を示す図面である。
図28は、巨大な圃場などで両側から苗補給する場合のティーチング経路を示す図面である。
図29(a)は、苗補給側の辺に3m以上張り出した障害物に作業車両が衝突する様子を示す図面であり、図29(b)は、図29(a)に示された障害物の張り出し形状を認識させるティーチング経路を示す図面である。
図30(a)は、進入口の影響により植え残しが発生する様子を示す図面であり、図30(b)は、進入口の分を残してティーチングを行う様子を示す図面であり、図30(b)は、残りの部分に手動運転により植付けを行う様子を示す図面である。
図31は、図1および図5に示されるモニタに表示される画面を示す図面である。
図32は、モニタに表示される苗補給位置を示す図面である。
図33は、各作業行程がモニタ上で色分けされて表示される様子を示す図面である。
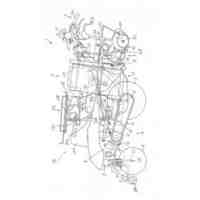
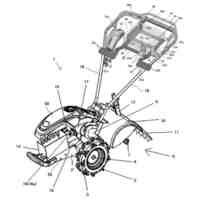
図34は、本発明の他の好ましい実施態様にかかる作業車両の略斜視図である。
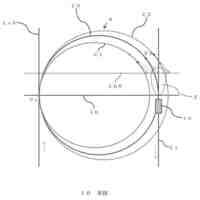
図35は、図34に示された実施態様において、リモコンアンテナに対するリモートコントローラの相対位置の3つのパターンを示す模式的平面図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
井関農機株式会社
作業機
13日前
井関農機株式会社
収穫機
12日前
井関農機株式会社
作業車両
今日
井関農機株式会社
苗移植機
22日前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
苗移植機
1か月前
井関農機株式会社
苗移植機
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
26日前
井関農機株式会社
苗移植機
22日前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
12日前
井関農機株式会社
コンバイン
14日前
井関農機株式会社
コンバイン
1か月前
井関農機株式会社
収穫作業機
1か月前
井関農機株式会社
コンバイン
1か月前
井関農機株式会社
コンバイン
14日前
井関農機株式会社
乗用芝刈機
1か月前
井関農機株式会社
穀粒乾燥機
1か月前
井関農機株式会社
コンバイン
1か月前
井関農機株式会社
コンバイン
12日前
井関農機株式会社
乗用芝刈機
12日前
井関農機株式会社
植物栽培設備
1か月前
井関農機株式会社
植物栽培設備
1か月前
井関農機株式会社
歩行型管理機
1か月前
井関農機株式会社
乗用型苗移植機
1か月前
井関農機株式会社
乗用作業車の操縦装置
26日前
井関農機株式会社
電動作業車の安全装置
26日前
井関農機株式会社
乗用芝刈機の管理システム
1か月前
井関農機株式会社
自律走行作業車の暗渠作成システム
26日前
井関農機株式会社
移植機
12日前
井関農機株式会社
作業車両
5日前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
5日前
井関農機株式会社
作業車両
1か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ