TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024144574
公報種別
公開特許公報(A)
公開日
2024-10-11
出願番号
2024118796,2023019950
出願日
2024-07-24,2017-09-15
発明の名称
作業車両
出願人
井関農機株式会社
代理人
主分類
A01B
69/00 20060101AFI20241003BHJP(農業;林業;畜産;狩猟;捕獲;漁業)
要約
【課題】直進走行の制御の開始直後であっても植付始めの乱れがなく、植付精度が低下するおそれのない作業車両を提供すること。
【解決手段】制御部は、対地作業部が対地作業を行える対地作業可能状態で、姿勢検出部)により検出した走行車体の姿勢が、本来の進行方向に沿う姿勢で走行しているときに直進サポートが利用可能であることを報知する報知装置を備え、走行車体の操舵状態を検出する検出部を備え、制御部は、対地作業部が対地作業を行える対地作業可能状態で、検出部が検出した操舵状態が走行車体を直進させる状態ではない場合、直進サポートが利用不可能であることを報知装置により報知することを特徴とする。
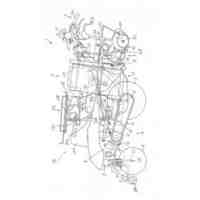
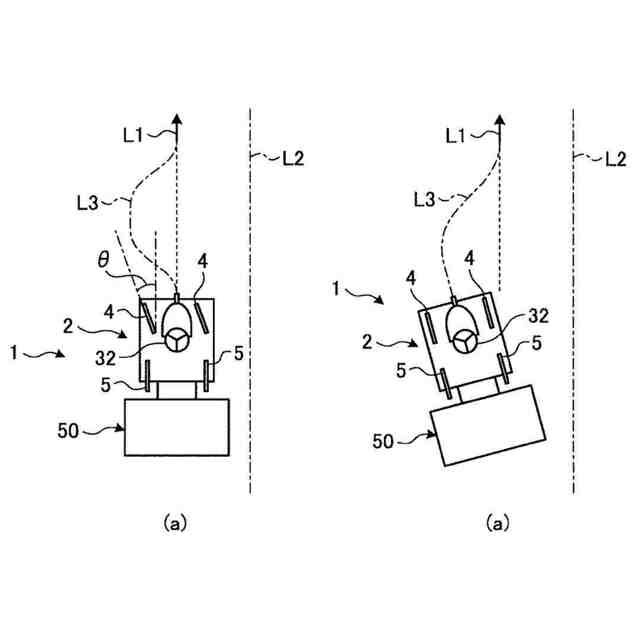
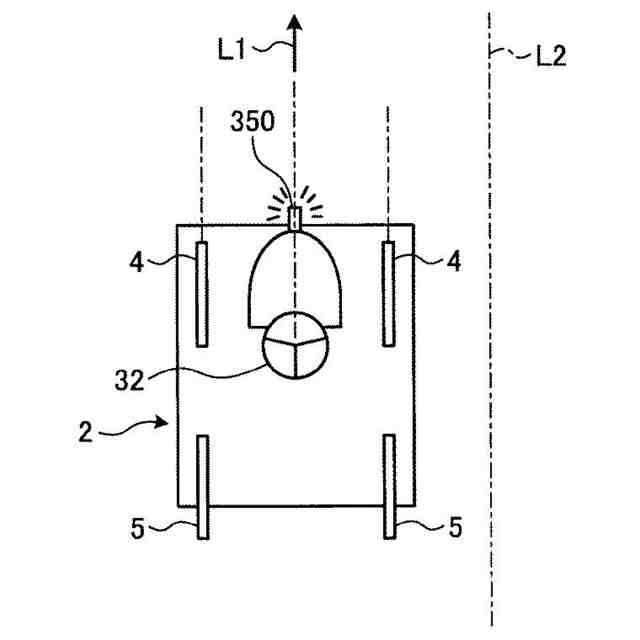
【選択図】図1A
特許請求の範囲
【請求項1】
後部に対地作業部(50)を連結可能であり、操舵装置(110)により操舵される転
舵輪(4)を備えた走行車体(2)と、
前記走行車体(2)の位置情報を取得する位置情報取得装置(120)と、
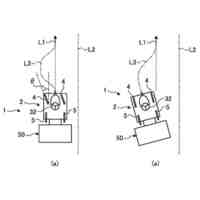
前記位置情報取得装置(120)が取得した位置情報に基づき前記操舵装置(110)を制御して前記走行車体(2)の自動直進走行を支援する直進サポートを行う制御部(150)と、前記走行車体(2)の進行方向が本来の進行方向である前記直進サポートにおける走行車体(2)の直進走行の基準となる方向からずれているか検出する姿勢検出部(170)を備え、
前記制御部(150)は、前記対地作業部(50)が対地作業を行える対地作業可能状態で、前記姿勢検出部(170)により検出した前記走行車体(2)の姿勢が、本来の進行方向に沿う姿勢で走行しているときに前記直進サポートが利用可能であることを報知する報知装置(200)を備え、
前記走行車体(2)の操舵状態を検出する検出部を備え、
前記制御部(150)は、前記対地作業部(50)が対地作業を行える対地作業可能状態で、前記検出部が検出した操舵状態が前記走行車体(2)を直進させる状態ではない場合、前記直進サポートが利用不可能であることを前記報知装置(200)により報知することを特徴とする作業車両。
続きを表示(約 330 文字)
【請求項2】
前記走行車体(2)は、
進行方向の目安となる指標部材を備え、前記指標部材を前記報知装置(200)として機能させることを特徴とする請求項1に記載の作業車両。
【請求項3】
前記位置情報取得装置(120)には、走行機体(2)の傾きを検出する慣性航法装置
が備えられ、
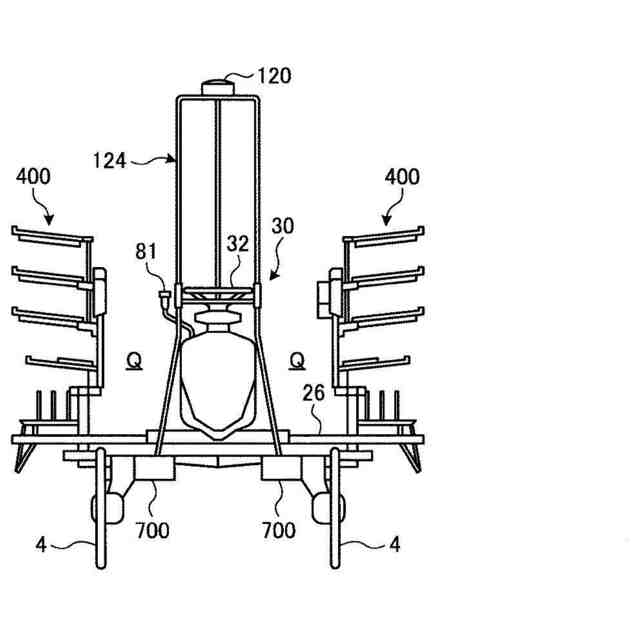
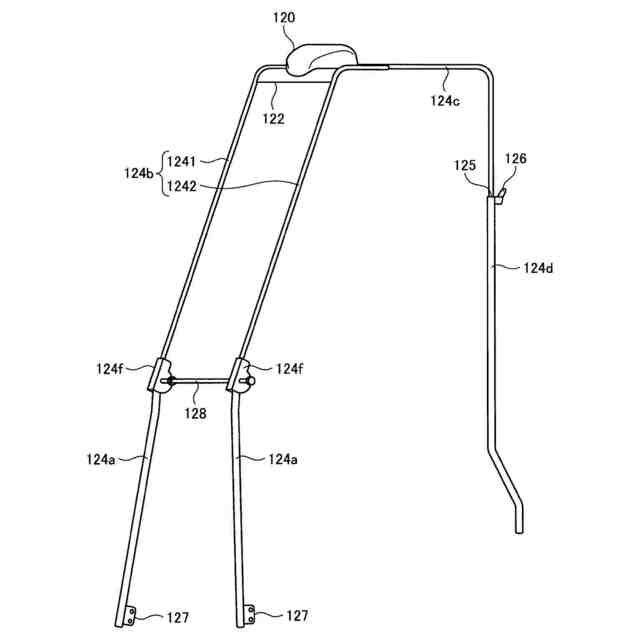
前記位置情報取得装置(120)は、フレーム(124)により支持し、
前記位置情報取得装置(120)から延在する配線が前記フレーム(124)に沿って
配索され、
前記フレーム(124)を回動させて前記位置情報取得装置(120)を下方へ移動さ
せることができることを特徴とする請求項1または2に記載の作業車両。
発明の詳細な説明
【技術分野】
【0001】
本発明は、作業車両に関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
従来、苗の植付け等の作業を行う際に用いる苗移植機等の作業車両には、直進走行を支援する自動操舵装置が設けられたものがあり、例えば、操舵装置の操舵輪を制御して直進位置に保持することによって自動直進走行を行うものが知られている(例えば、特許文献1を参照)。
【先行技術文献】
【特許文献】
【0003】
特開2016-24541号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、例えば、特許文献1に開示された従来の作業車両は、自動操舵装置による直進走行の制御を開始するときに、操舵装置による舵角が直進状態に見合った所定範囲内にあるか否かを認識することが作業者にとって困難であることは考慮されていない。また、走行車体自体が進行方向に対して真っ直ぐな姿勢になっているか否かを識別するにも、作業者には熟練した技術や長年の経験が必要となる。
【0005】
そのため、従来の作業車両では、自動操舵装置による直進走行の制御を開始した直後の植付け始めが乱れ、植付精度が低下するおそれがあった。
【0006】
本発明は、上記に鑑みてなされたものであって、直進走行の制御の開始直後であっても植付始めの乱れがなく、植付精度が低下するおそれのない作業車両を提供することを目的とする。
【課題を解決するための手段】
【0007】
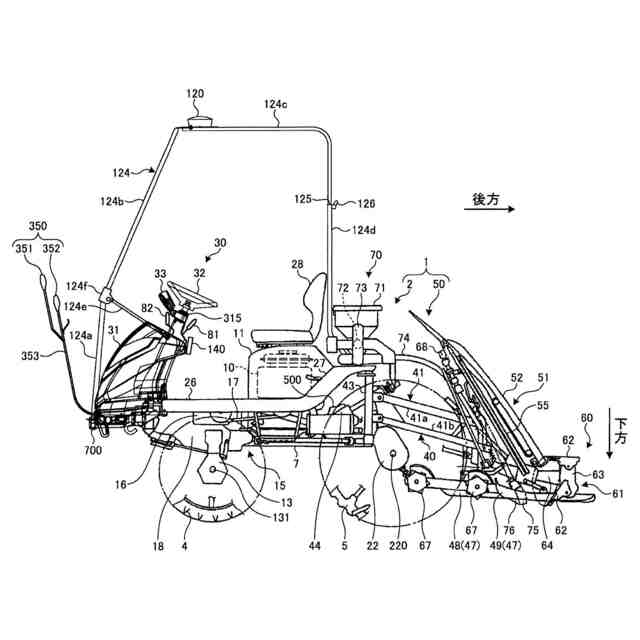
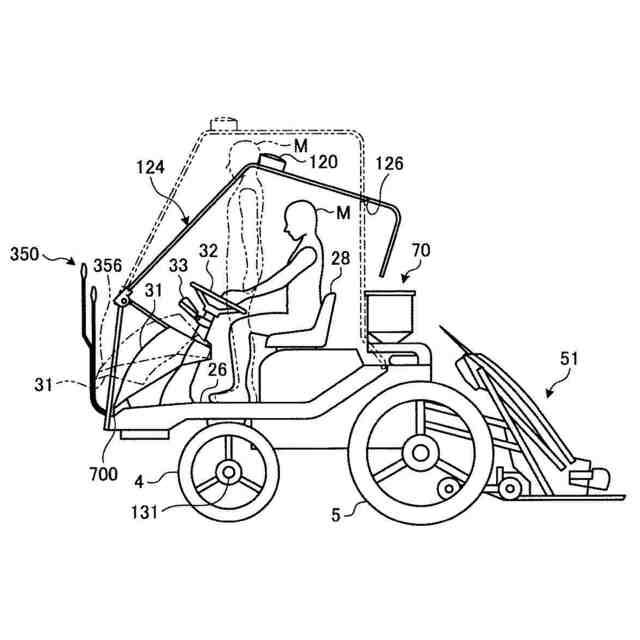
上述した課題を解決し、目的を達成するために、請求項1に記載の作業車両(1)は、後部に対地作業部(50)を連結可能であり、操舵装置(110)により操舵される転
舵輪(4)を備えた走行車体(2)と、
前記走行車体(2)の位置情報を取得する位置情報取得装置(120)と、
前記位置情報取得装置(120)が取得した位置情報に基づき前記操舵装置(110)を制御して前記走行車体(2)の自動直進走行を支援する直進サポートを行う制御部(150)と、前記走行車体(2)の進行方向が本来の進行方向である前記直進サポートにおける走行車体(2)の直進走行の基準となる方向からずれているか検出する姿勢検出部(170)を備え、
前記制御部(150)は、前記対地作業部(50)が対地作業を行える対地作業可能状態で、前記姿勢検出部(170)により検出した前記走行車体(2)の姿勢が、本来の進行方向に沿う姿勢で走行しているときに前記直進サポートが利用可能であることを報知する報知装置(200)を備え、
前記走行車体(2)の操舵状態を検出する検出部を備え、
前記制御部(150)は、前記対地作業部(50)が対地作業を行える対地作業可能状態で、前記検出部が検出した操舵状態が前記走行車体(2)を直進させる状態ではない場合、前記直進サポートが利用不可能であることを前記報知装置(200)により報知することを特徴とする。
【0008】
請求項2に記載の作業車両(1)は、請求項1において、前記走行車体(2)は、進行方向の目安となる指標部材を備え、前記指標部材を前記報知装置(200)として機能させることを特徴とする。
【0009】
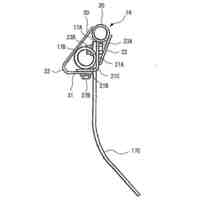
請求項3に記載の作業車両(1)は、請求項1または2において、前記位置情報取得装置(120)には、走行機体(2)の傾きを検出する慣性航法装置が備えられ、前記位置情報取得装置(120)は、フレーム(124)により支持し、前記位置情報取得装置(120)から延在する配線が前記フレーム(124)に沿って配索され、前記フレーム(124)を回動させて前記位置情報取得装置(120)を下方へ移動させることができることを特徴とする。
【発明の効果】
【0010】
請求項1に記載の作業車両によれば、走行車体が旋回した後に姿勢検出部が検出した走行車体の姿勢が真っ直ぐな状態で走行しているときに、利用可能であることを報知装置により報知するため、走行車体が想定された進行方向に対して斜め方向へ進行することが防止される。したがって、作業車両が例えば苗植付機などの場合、作業開始直後の苗の植付始めが乱れてしまうことの防止効果をより高めることができる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
井関農機株式会社
作業機
9日前
井関農機株式会社
苗移植機
1日前
井関農機株式会社
苗移植機
5日前
井関農機株式会社
作業車両
6日前
井関農機株式会社
コンバイン
1日前
井関農機株式会社
コンバイン
1日前
井関農機株式会社
収穫作業機
5日前
井関農機株式会社
コンバイン
6日前
井関農機株式会社
植物栽培設備
1日前
井関農機株式会社
歩行型管理機
5日前
井関農機株式会社
乗用型苗移植機
5日前
井関農機株式会社
乗用芝刈機の管理システム
5日前
井関農機株式会社
作業車両
5日前
井関農機株式会社
作業車両
9日前
井関農機株式会社
籾摺選別機
5日前
個人
釣り用ルアー
5日前
個人
ハーブの育種法
6日前
東レ株式会社
海苔網
7日前
個人
ルアーホルダ
12日前
井関農機株式会社
作業機
9日前
井関農機株式会社
コンバイン
1日前
個人
手押し式草刈り機
12日前
井関農機株式会社
コンバイン
1日前
個人
回転式草刈刃
1日前
株式会社たねまき
収穫装置
6日前
東邦化学工業株式会社
除菌剤組成物
12日前
松山株式会社
農作業機
9日前
ユシロ化学工業株式会社
組成物
5日前
井関農機株式会社
収穫作業機
5日前
株式会社クボタ
作業車
5日前
セッツ株式会社
殺菌剤組成物
6日前
グローブライド株式会社
釣用仕掛け
9日前
株式会社クボタ
作業車
5日前
第一精工株式会社
逆巻替え装置
6日前
個人
太陽光パネル付植物栽培システム
1日前
株式会社ランテクノ
植物育成システム
5日前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ