TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024046060
公報種別
公開特許公報(A)
公開日
2024-04-03
出願番号
2022151219
出願日
2022-09-22
発明の名称
車両制御装置
出願人
三菱電機株式会社
代理人
個人
,
個人
,
個人
,
個人
,
個人
主分類
G08G
1/00 20060101AFI20240327BHJP(信号)
要約
【課題】グローバルマップ情報に基づく道路情報と、車両のセンサによって検出された情報に基づく道路情報とに差異が生じている場合であっても、より精度の高い運転支援を行うことができる車両制御装置を得る。
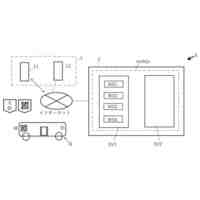
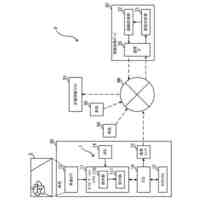
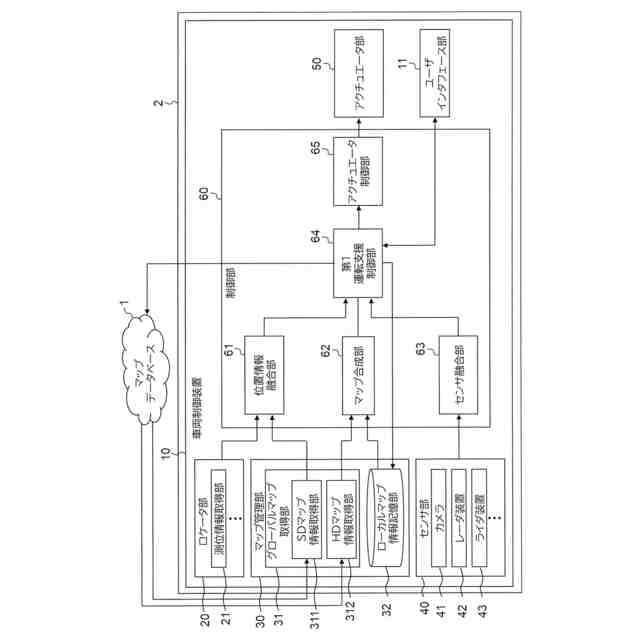
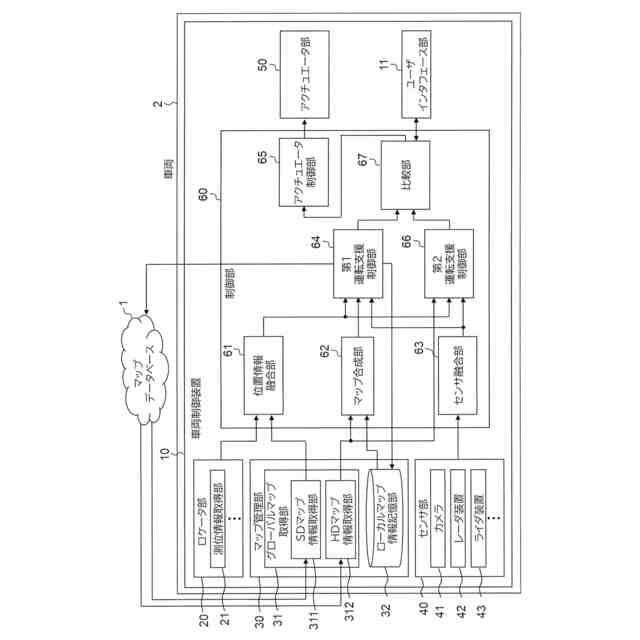
【解決手段】制御部60は、センサ融合情報と、測位情報と、グローバルマップ情報と、ローカルマップ情報とに基づいて、車両2の位置及び車両2の進行方向を特定する。センサ融合情報は、カメラ41、レーダ装置42、及びライダ装置43によるセンシング情報を融合した情報である。制御部60は、車両2の位置及び車両2の進行方向に基づいて、走行計画を生成する。制御部60は、走行計画に従って、アクチュエータ部50に対する制御量を決定し、決定された制御量に基づいて、アクチュエータ部50を制御する。
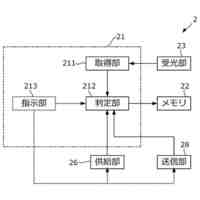
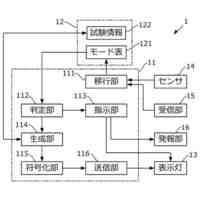
【選択図】図2
特許請求の範囲
【請求項1】
車両についての測位情報を取得するロケータ部、
前記車両外部のマップデータベースから、グローバルマップ情報として、少なくとも前記車両の自動運転に必要な情報を含むマップ情報を取得するグローバルマップ情報取得部、
前記車両固有のマップ情報であるローカルマップ情報を記憶しているローカルマップ情報記憶部、
前記車両の周辺をセンシングすることにより、センシング情報を取得する複数のセンサを有しているセンサ部、
前記車両の運転を制御するアクチュエータ部、及び
前記アクチュエータ部を制御する制御部を備え、
前記制御部は、
複数の前記センシング情報を融合した情報であるセンサ融合情報と、前記測位情報と、前記グローバルマップ情報と、前記ローカルマップ情報とに基づいて、前記車両の位置及び前記車両の進行方向を特定し、
前記位置及び前記進行方向に基づいて、前記車両の局所的な走行軌跡の計画である走行計画を生成し、
前記走行計画に従って、前記アクチュエータ部に対する制御量を決定し、
決定された前記制御量に基づいて、前記アクチュエータ部を制御する
車両制御装置。
続きを表示(約 1,800 文字)
【請求項2】
前記グローバルマップ情報取得部は、
前記車両のナビゲーションに用いられるSDマップに関する情報であるSDマップ情報を前記マップデータベースから取得するSDマップ情報取得部を有しており、
前記制御部は、前記測位情報と前記SDマップ情報とを融合することにより前記位置を特定する
請求項1に記載の車両制御装置。
【請求項3】
前記グローバルマップ情報取得部は、前記SDマップよりも高精度のHDマップに関する情報であるHDマップ情報を前記マップデータベースから取得するHDマップ情報取得部をさらに有しており、
前記HDマップ情報取得部は、
前記HDマップ情報として、前記HDマップが複数の領域に分割されてできた分割領域毎の情報である分割マップ情報を取得可能に構成され、
前記車両の前記位置を含む関連領域と重なる前記分割領域に対応する前記分割マップ情報を取得する
請求項2に記載の車両制御装置。
【請求項4】
前記HDマップ情報取得部は、
前記車両が前記位置を変えることにより、前記関連領域と新たに重なることとなった前記分割領域に対応する前記分割マップ情報を新たに取得し、
前記車両が前記位置を変えることにより、前記関連領域との重なりがなくなることとなった前記分割領域に対応する取得済みの前記分割マップ情報を解放する
請求項3に記載の車両制御装置。
【請求項5】
前記制御部は、
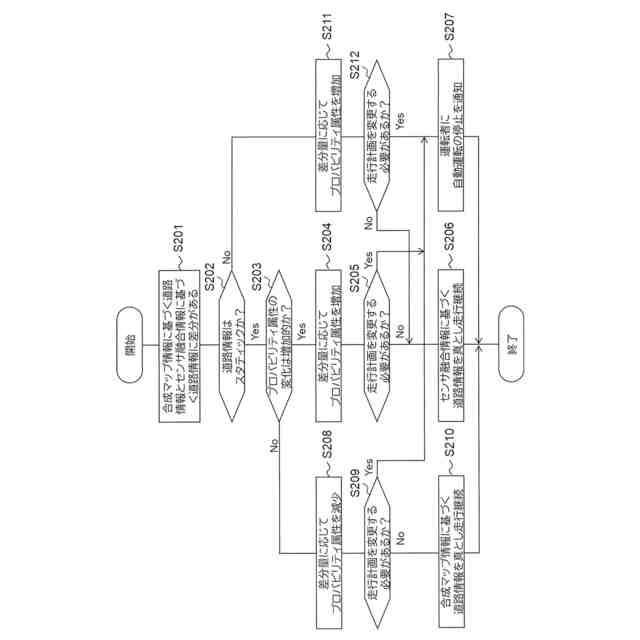
前記HDマップ情報と前記ローカルマップ情報とを合成することにより得られる合成マップ情報に基づく道路情報と、前記センサ融合情報に基づく道路情報とを比較し、
前記合成マップ情報に基づく道路情報と前記センサ融合情報に基づく道路情報とに差分が生じた場合、前記差分の情報である差分情報を前記ローカルマップ情報に加えるとともに、前記差分情報を前記マップデータベースに送信する
請求項3又は請求項4に記載の車両制御装置。
【請求項6】
前記制御部は、
前記差分情報によって前記走行計画を変更する必要があるか否かを判定し、
前記走行計画を変更する必要がない場合、前記走行計画に従って、前記アクチュエータ部を制御し、
前記走行計画を変更する必要がある場合、前記アクチュエータ部の制御を停止する
請求項5に記載の車両制御装置。
【請求項7】
前記制御部は、
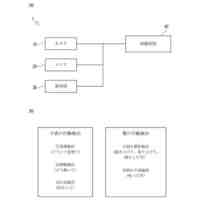
前記センサ融合情報に基づく道路情報、前記HDマップ情報に基づく道路情報、及び前記ローカルマップ情報として記憶されている道路情報を、前記車両の走行中に状態が変化しない情報であるスタティック道路情報と、前記車両の走行中に状態が変化する情報であるダイナミック道路情報とに分類し、
前記スタティック道路情報に関連する前記差分情報及び前記ダイナミック道路情報に関連する前記差分情報に対して、それぞれ前記走行計画の変更の必要可否を判定する
請求項6に記載の車両制御装置。
【請求項8】
前記制御部は、
前記差分情報の確からしさを表す属性としてプロバビリティ属性が前記差分情報に付加されたとき、
前記差分情報の差分量に応じて前記プロバビリティ属性を変化させ、
前記プロバビリティ属性の大きさに基づいて前記走行計画の変更の必要可否を判定する
請求項7に記載の車両制御装置。
【請求項9】
前記制御部は、
前記HDマップ情報と前記ローカルマップ情報とを合成することにより得られる合成マップ情報に基づく道路情報と、前記センサ融合情報に基づく道路情報とに基づいて生成される第1走行計画に従って第1制御量を算出するとともに、
前記HDマップ情報に基づく道路情報と、前記センサ融合情報に基づく道路情報とに基づいて生成される第2走行計画に従って第2制御量を算出し、
前記第1制御量と前記第2制御量とを比較するとともに、前記第1制御量及び前記第2制御量のいずれかを前記制御量として決定し、
前記第1制御量と前記第2制御量との間に差が生じている場合、前記差を記憶する
請求項3又は請求項4に記載の車両制御装置。
発明の詳細な説明
【技術分野】
【0001】
本開示は、車両制御装置に関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
従来の運転支援装置では、自車のセンサにより取得されたデータに基づく自車位置の周辺情報と、自車位置が属するエリアにおける部分地図の情報との相違点が検出された場合、当該相違点に関する情報がサーバー装置に送信される(例えば、特許文献1)。
【先行技術文献】
【特許文献】
【0003】
特開2016-156973号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上記のような従来の運転支援装置では、部分地図の情報と、自車のセンサにより取得された情報とに差異が生じていても、当該差異を考慮した運転支援は行われないため、精度の高い運転支援を行うことができないことがあった。
【0005】
本開示は、上記のような課題を解決するために為されたものであり、グローバルマップ情報に基づく道路情報と、車両のセンサによって検出された情報に基づく道路情報とに差異が生じている場合であっても、より精度の高い運転支援を行うことができる車両制御装置を得ることを目的とする。
【課題を解決するための手段】
【0006】
本開示に係る車両制御装置は、車両についての測位情報を取得するロケータ部、車両外部のマップデータベースから、グローバルマップ情報として、少なくとも車両の自動運転に必要な情報を含むマップ情報を取得するグローバルマップ情報取得部、車両固有のマップ情報であるローカルマップ情報を記憶しているローカルマップ情報記憶部、車両の周辺をセンシングすることにより、センシング情報を取得する複数のセンサを有しているセンサ部、車両の運転を制御するアクチュエータ部、及びアクチュエータ部を制御する制御部を備え、制御部は、複数のセンシング情報を融合した情報であるセンサ融合情報と、測位情報と、グローバルマップ情報と、ローカルマップ情報とに基づいて、車両の位置及び車両の進行方向を特定し、位置及び進行方向に基づいて、車両の局所的な走行軌跡の計画である走行計画を生成し、走行計画に従って、アクチュエータ部に対する制御量を決定し、決定された制御量に基づいて、アクチュエータ部を制御する。
【発明の効果】
【0007】
本開示に係る車両制御装置によれば、グローバルマップ情報に基づく道路情報と、車両のセンサによって検出された情報に基づく道路情報とに差異が生じている場合であっても、より精度の高い運転支援を行うことができる。
【図面の簡単な説明】
【0008】
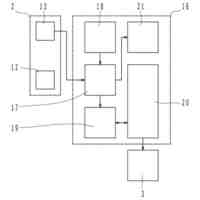
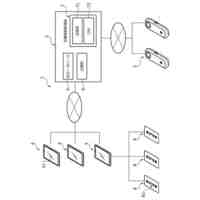
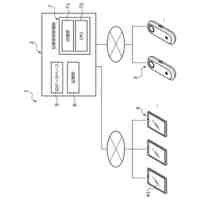
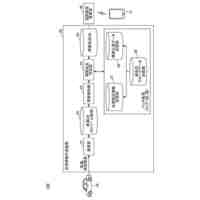
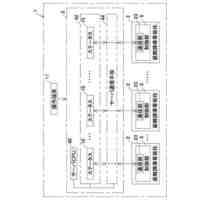
実施の形態1に係る車両制御装置の構成を示すブロック図である。
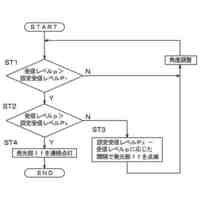
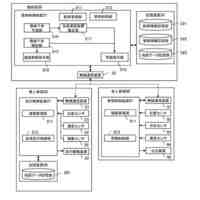
図1の制御部が実行する運転支援ルーチンを示すフローチャートである。
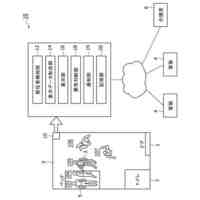
関連領域及び分割領域の第1の例を示す模式図である。
関連領域及び分割領域の第2の例を示す模式図である。
HDマップ情報のダイナミックアロケーションの例を示す図である。
実施の形態2に係る車両制御装置の制御部が実行する運転支援ルーチンを示すフローチャートである。
実施の形態3に係る車両制御装置の構成を示すブロック図である。
実施の形態1~3の車両制御装置の機能を実現する処理回路の第1の例を示す構成図である。
実施の形態1~3の車両制御装置の機能を実現する処理回路の第2の例を示す構成図である。
【発明を実施するための形態】
【0009】
以下、実施の形態について、図面を参照して説明する。
実施の形態1.
図1は、実施の形態1に係る車両制御装置の構成を示すブロック図である。車両制御装置10は、車両2に設けられている。
【0010】
車両2は、自動運転により走行可能な車両である。ここで、自動運転には、AD(Autonomous Driving)及びADAS(Autonomous Driving/Advanced Driver-Assistance Systems)が含まれる。車両2は、図示しない駆動装置、操舵装置、及び制動装置を有している。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
非常放送システム
6日前
個人
バス送迎支援システム
26日前
能美防災株式会社
警報器
1か月前
能美防災株式会社
表示灯
22日前
ニッタン株式会社
感度試験装置
22日前
トヨタ自動車株式会社
制御装置
今日
個人
配車システム
1か月前
個人
配車システム
1か月前
株式会社アガタ
閉空間監視装置
23日前
トヨタ自動車株式会社
情報収集システム
16日前
株式会社大林組
異常検知システム
1か月前
株式会社京三製作所
車両検出装置
7日前
竹中エンジニアリング株式会社
緊急呼出システム
29日前
竹中エンジニアリング株式会社
緊急呼出システム
29日前
ユニット株式会社
人感センサー音声警報器
22日前
トヨタ自動車株式会社
運転支援装置
20日前
井関農機株式会社
トラクタの制御システム
1か月前
トヨタ自動車株式会社
渋滞情報作成装置
8日前
能美防災株式会社
試験器
22日前
大和ハウス工業株式会社
見守りシステム
21日前
トヨタ自動車株式会社
車両情報配信装置
1か月前
表示灯株式会社
災害警報システム
6日前
本田技研工業株式会社
運転代行仲介装置
1か月前
能美防災株式会社
感知器
22日前
株式会社アサヒ電子研究所
居住者監視システム
8日前
日立建機株式会社
車両管理システム
20日前
株式会社京三製作所
歩行者用音声案内装置
1か月前
能美防災株式会社
差動式分布型感知器
28日前
鹿島建設株式会社
警告装置
13日前
大和ハウス工業株式会社
異常判定システム
1か月前
トヨタ自動車株式会社
運転支援装置
1か月前
トヨタ自動車株式会社
情報処理装置
14日前
綜合警備保障株式会社
警備システム及び警備方法
1か月前
株式会社LIXIL
閉込警告システム
21日前
パイオニア株式会社
置き去り検出装置
1か月前
CMN株式会社
情報伝達システム
23日前
続きを見る
他の特許を見る







 特許ウォッチ
特許ウォッチ