TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024022272
公報種別
公開特許公報(A)
公開日
2024-02-16
出願番号
2022125729
出願日
2022-08-05
発明の名称
ハイパスフィルタを用いた2慣性系制御
出願人
CKD日機電装株式会社
代理人
主分類
G05B
13/04 20060101AFI20240208BHJP(制御;調整)
要約
【課題】2慣性系の簡易的な負荷挙動推定法と制御法を提供する。
【解決手段】
本発明は、負荷モデルとモータモデルのみを利用する方式であり、結合部(カップリング)のモデルが不要なため、状態推定法として知られるオブザーバに比べて性能は劣るが、適用が簡単である。さらに本発明では、2慣性系制御では、制御入力にハイパスフィルタをかけることが有効なことを示す。
【選択図】図5
特許請求の範囲
【請求項1】
制御入力信号を負荷モデルに入力したときの出力信号(以下、信号1)を求め、さらに負荷モデルと動力系逆モデルをかけあわせたモデルに動力系出力を通したときの信号(以下、信号2)を求め、信号1から信号2を引算することに基づく2慣性系負荷挙動の推定方式(以下、方法1)、および方法1による推定値を利用した2慣性系制御方式
続きを表示(約 71 文字)
【請求項2】
制御入力信号に高域通過特性をもつフィルタをかけることによって、請求項1の2慣性系制御方式を簡略的に実現する方法
発明の詳細な説明
【技術分野】
【0001】
本発明は制御系の設計法に関する。
続きを表示(約 2,800 文字)
【背景技術】
【0002】
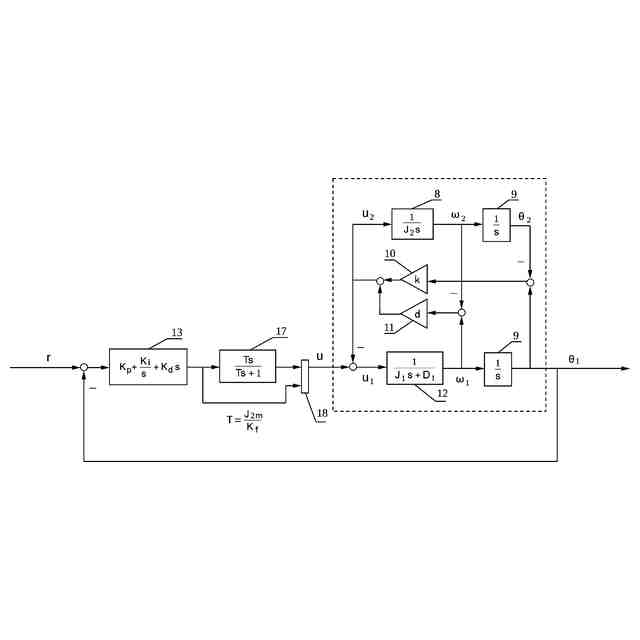
2慣性系はバネで連結された2つの質量からなる振動モデルであり、負荷につながるモータの代表的なモデルでもある。典型的な2慣性モデルは次のように表される(図4点線枠)。
TIFF
2024022272000002.tif
8
21
TIFF
2024022272000003.tif
4
29
TIFF
2024022272000004.tif
8
29
TIFF
2024022272000005.tif
4
12
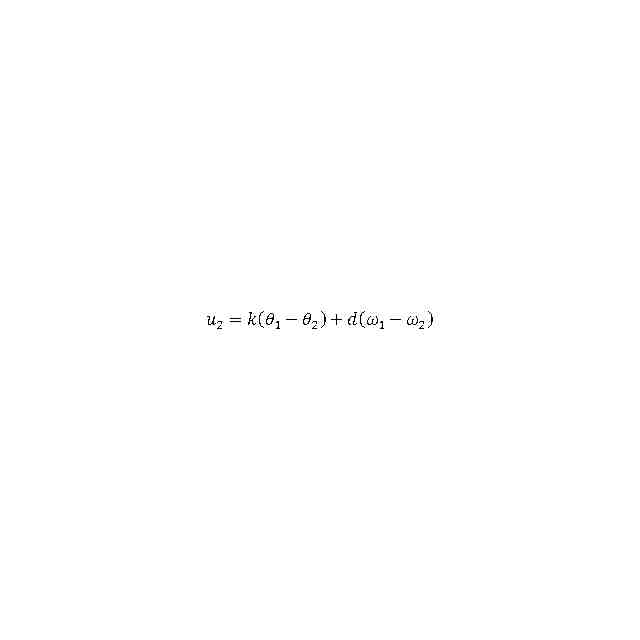
ここでsはラプラス演算子であり、sは微分、1/sは積分の作用を表す。数式中の添字1はモータに関する量、添字2は負荷に関する量を表す。JとDは慣性モーメントと粘性摩擦係数である。ωは角速度、θは角度である。数2は結合部のモデルであり、kはカップリングの剛性を表すバネ定数、dは振動の減衰度を表す粘性摩擦係数である。u2はモータと負荷の挙動のずれ(カップリングのねじれ)によって生じるトルクであり、負荷に対しては駆動力として働き、モータに対してはマイナス符号で入るので反力として働く。数4のuは2慣性系全体に加わる制御入力である。
【0003】
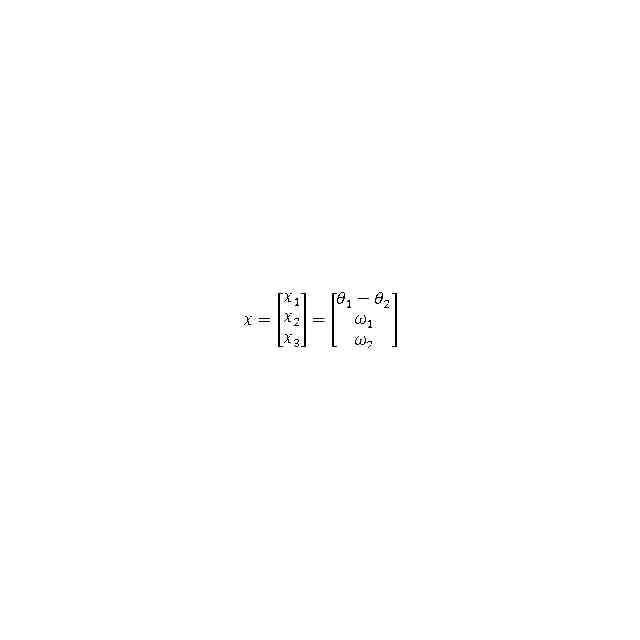
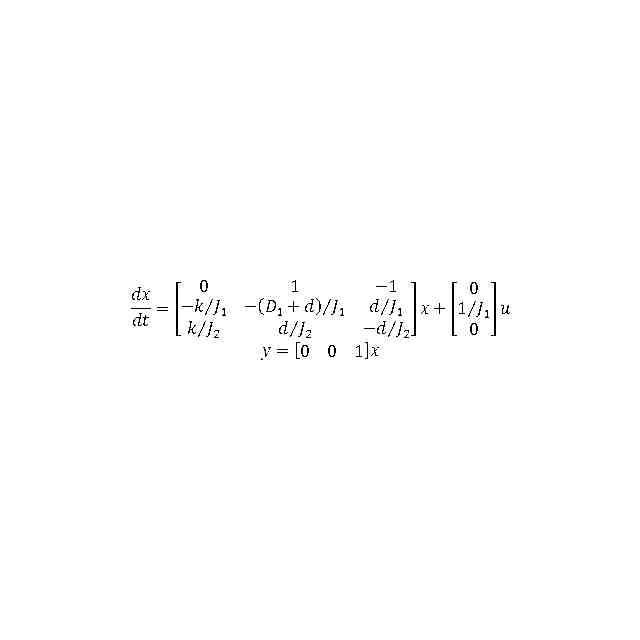
2慣性系の制御では、負荷の挙動を測定または推定する必要がある。推定のための代表的な方法にオブザーバ(非特許文献1)がある。上述の2慣性系の状態を数5で定義した場合、数6の状態空間モデルが得られ、オブザーバは数7で与えられる。
TIFF
2024022272000006.tif
8
20
TIFF
2024022272000007.tif
12
49
TIFF
2024022272000008.tif
12
84
ここで添字mはパラメータの推定値を表し、これらは真値に一致することが仮定される。ハット記号は信号の推定値を表し、オブザーバゲインLを適切に設計することで状態xの推定が可能になる。
【先行技術文献】
【非特許文献】
【0004】
D.G. Luenberger, An Introduction to Observers, IEEE Transactions on Automatic Control, Vol.16, No.6, 1971
【発明の概要】
【発明が解決しようとする課題】
【0005】
本発明は、2慣性系の負荷挙動の簡易推定法(本発明の方式1)およびハイパスフィルタを用いた2慣性系の簡易制御法(本発明の方式2)を提供する。
【課題を解決するための手段】
【0006】
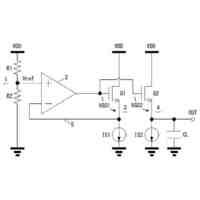
2慣性系のブロック線図を図1に示す。P2は負荷、P1はモータ(動力)を表し、その入出力には次の関係がある。
TIFF
2024022272000009.tif
4
12
TIFF
2024022272000010.tif
8
10
数8と数9からu2とu1を消去すると数10を得る。
TIFF
2024022272000011.tif
8
32
ただし1/P1はP1の逆システムである。よってP1, P2のモデルをP1m, P2mで表すと、負荷出力y2の簡易推定式として数11を得る。
TIFF
2024022272000012.tif
8
19
数11による推定値は、例えば図2のようにコントローラCを介して制御に利用できる。図1の各ブロック出力を角速度に対応させた場合(数12)、数11は数13となる。
TIFF
2024022272000013.tif
12
24
TIFF
2024022272000014.tif
8
55
【0007】
イナーシャ比J2/J1が大きい場合は振動的になりやすく、その場合、数13は数14で近似することができる。
TIFF
2024022272000015.tif
8
21
数14はω1を含まないので、観測ノイズ等を含む実信号θ1の微分計算が不要になり、実用上の都合もよい。以上が本発明の方式1である。次に本発明の方式2を述べる。
【0008】
数14の右辺第2項をさらに省いた数15を考える。
TIFF
2024022272000016.tif
8
12
数15は、数4の制御入力uがほぼ負荷側で費やされる状況、すなわち数16の近似が成り立つ状況と解釈できる。
TIFF
2024022272000017.tif
4
27
また別の観点では、数13の簡略版として数15を用いることは、数17の近似を行うこと、すなわち図2からP2m/P1mのブロックを省くことに対応する。
TIFF
2024022272000018.tif
8
22
P2m/P1mがない図2は、制御入力に数18のフィルタをかけた図3と等価である。
TIFF
2024022272000019.tif
8
14
コントローラCが比例ゲイン(数19)の場合、数18は数20のハイパスフィルタとなる。
TIFF
2024022272000020.tif
4
7
TIFF
2024022272000021.tif
12
33
【0009】
上記ハイパスフィルタは、定常状態(s=0)でのゲインが0なので、過渡状態のためのフィルタである。サーボ系の場合、このハイパスフィルタは定常状態(の近傍)では基本的にはオフにする。ヒトが手で2慣性系を制御する場面を想定してみると、負荷の揺れが大きいときは、まずその揺れを抑えることに専念すると思われる。そして負荷の揺れが収まってきてから、負荷を希望の位置にもっていくと思われる。上記ハイパスフィルタのオンオフの切換えは、このような状況に類似する。
【発明の効果】
【0010】
数11による推定は、オブザーバよりも性能は劣るが、結合部(図1の記号2)のモデルを利用しないためカップリング剛性などを知る必要がなく、その分適用が容易である。
【図面の簡単な説明】
(【0011】以降は省略されています)
特許ウォッチbot のツイートを見る
この特許をJ-PlatPatで参照する
関連特許
株式会社ディスコ
加工装置
2か月前
株式会社豊田自動織機
無人走行体
2か月前
川崎重工業株式会社
制御装置
2か月前
株式会社クボタ
作業車
1か月前
アズビル株式会社
流量制御装置
21日前
アズビル株式会社
電圧出力回路
1か月前
ミネベアミツミ株式会社
入力装置
12日前
トヨタ自動車株式会社
自動走行搬送車
20日前
エイブリック株式会社
ボルテージレギュレータ
20日前
株式会社クボタ
故障診断装置
19日前
株式会社クボタ
操作機構及び作業車
1か月前
株式会社デンソー
制御装置
25日前
日本プラスト株式会社
節度感付加装置
1か月前
リックス株式会社
状態検出装置
15日前
株式会社デンソー
制御装置
25日前
CKD日機電装株式会社
むだ時間を用いた高調波除去
2か月前
株式会社オリジン
電源装置
1か月前
株式会社オリジン
電源装置
1か月前
村田機械株式会社
搬送車システム
5日前
株式会社デンソー
減圧弁制御装置
1か月前
株式会社GSユアサ
電力変換装置
28日前
株式会社デンソー
電子制御装置
1か月前
株式会社豊田自動織機
車両用の電動圧縮機
2か月前
NTN株式会社
情報処理装置
2か月前
THK株式会社
編集装置及び編集方法
1か月前
THK株式会社
編集装置及び編集方法
1か月前
川崎重工業株式会社
要因分析装置及び要因分析方法
25日前
村田機械株式会社
搬送車システム
2か月前
株式会社FUJI
暖機運転システムを備えた工作機械
1か月前
東洋電装株式会社
移動検出装置および鞍乗車両
27日前
株式会社ディスコ
加工装置
1か月前
国立大学法人 名古屋工業大学
パラメータ探索空間算出方法
1か月前
村田機械株式会社
走行車システム
1か月前
愛三工業株式会社
弁システム
1か月前
株式会社デンソー
ペダル装置
1か月前
DMG森精機株式会社
工作機械
1か月前
続きを見る
他の特許を見る





 特許ウォッチ
特許ウォッチ