TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025179442
公報種別
公開特許公報(A)
公開日
2025-12-10
出願番号
2024086189
出願日
2024-05-28
発明の名称
区画線施工車、施工方法および施工管理プログラム
出願人
信号器材株式会社
,
中日本高速道路株式会社
代理人
個人
主分類
E01C
23/22 20060101AFI20251203BHJP(道路,鉄道または橋りょうの建設)
要約
【課題】区画線施工の高速化に対応しつつ、充分な精度で路面に区画線を形成可能な区画線施工車を提供する。
【解決手段】
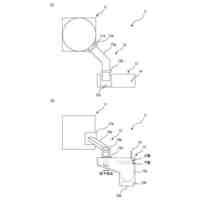
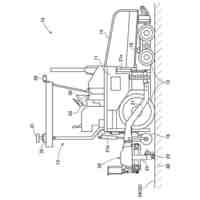
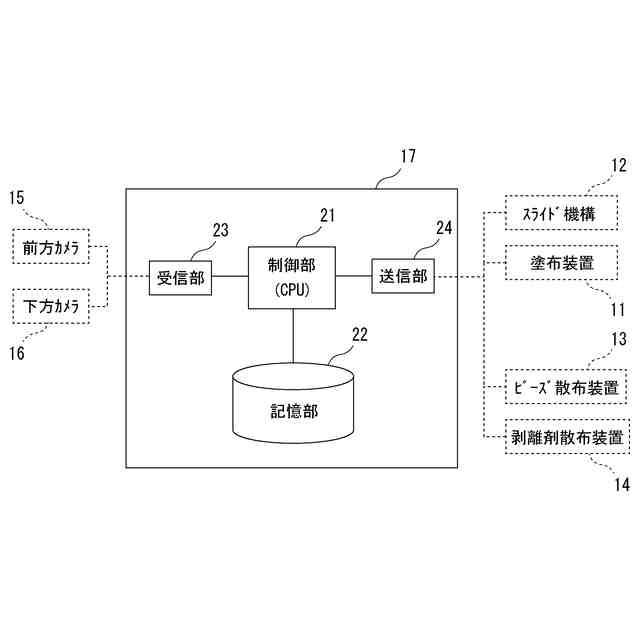
本発明にかかる区画線施工車は、制御装置17を構成する制御部21が、前方カメラ15および下方カメラ16によりに撮像されたカメラ画像を利用して既設の区画線を抽出し、区画線の抽出結果に基づいて、塗料の噴射位置を調整する処理、さらに、塗布装置11、ビーズ散布装置13および剥離剤散布装置14に対し噴射開始/停止タイミングを指示する処理、を実行する。そして、上記既設の区画線を抽出する処理においては、AI画像生成モデルを用いて、区画線以外の不要な情報が写り込んだ合成画像から、区画線の白線部分のみを抽出したAI画像を生成し、このAI画像に基づいて、区画線以外の不要な情報が写り込んだ合成画像から、区画線以外の不要な情報を削除することとした。
【選択図】図2
特許請求の範囲
【請求項1】
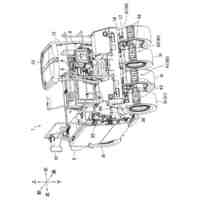
区画線施工用の塗料を路面に噴射する塗布装置と、当該塗布装置を車幅方向にスライドさせて塗料の噴射位置を調整するスライド機構と、を備え、既設の区画線に沿って走行しながら当該既設の区画線に重ねて新規の区画線を上塗りする区画線施工車において、
予め設定された撮像範囲の路面を定期的に撮像するカメラと、
区画線施工に関する制御処理を実行する制御部および当該制御処理の過程で得られる各種情報を記憶するための記憶部を有する制御装置と、
を備え、
前記制御部は、
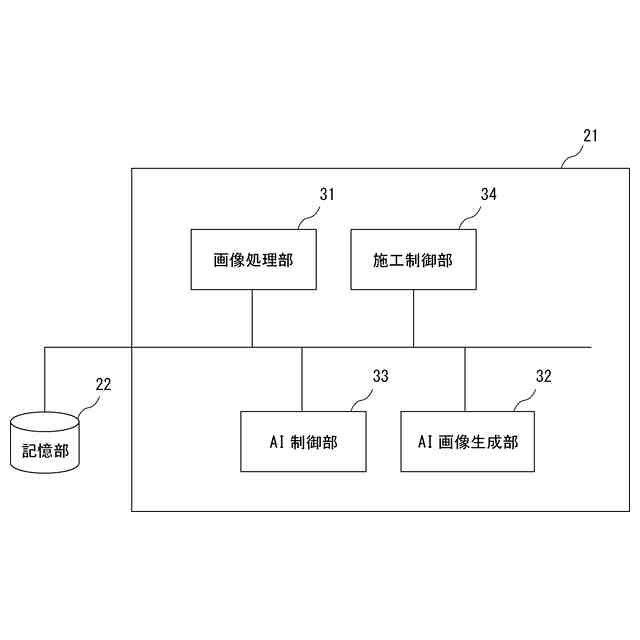
定期的に撮像されたカメラ画像に対し個別に俯瞰化する画像処理を行い、俯瞰化された路面画像を前記記憶部に記憶する画像処理部と、
前記画像処理部により定期的に生成された路面画像から、白線部分として認識された情報の中心線である第1の中心線を抽出し、当該第1の中心線を前記記憶部に記憶する施工制御部と、
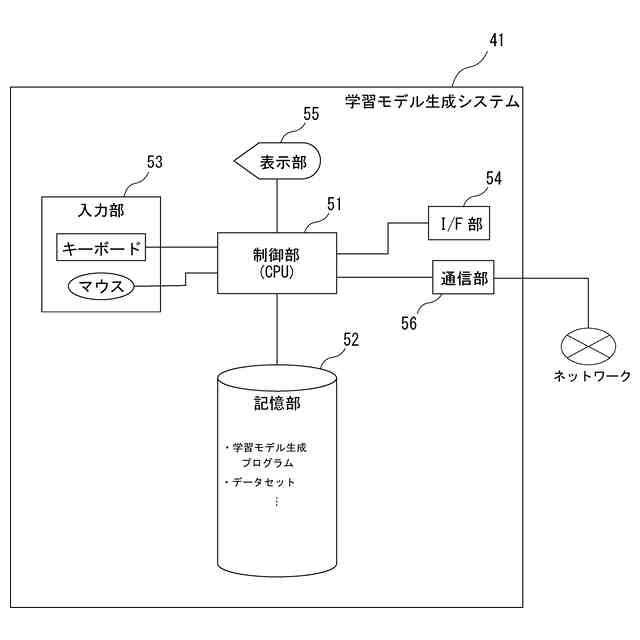
様々な場所で撮像した区画線が写るカメラ画像に対し前記画像処理を行うことにより生成された不要な情報を含む区画線画像を説明変数とし、当該区画線画像に対しアノテーションを実施することにより不要な情報を削除し区画線の白線部分を抽出した教師画像を目的変数として機械学習を行った学習済みのAI画像生成モデルに、前記画像処理部により生成された路面画像から一定間隔で抽出されたAI実行対象画像を入力することで、区画線の白線部分のみを抽出したAI画像を生成するAI画像生成部と、
前記AI画像から、区画線の白線部分における幅方向の中心線である第2の中心線を抽出し、当該第2の中心線を前記記憶部に記憶するAI制御部と、
を備え、
区画線に沿って理想的な経路を走行した場合にカメラ画像の中心に区画線が撮像されるように、予め前記カメラに対してキャリブレーションが行われた状態において、
前記施工制御部は、さらに、
前記記憶部に記憶された第2の中心線を読み出し、第2の中心線をつなぎ合わせた予想中心線を求め、その予想中心線に所定の許容幅を持たせた白線検出範囲を規定し、
前記記憶部から第1の中心線を読み出し、当該第1の中心線から白線検出範囲内の中心線を抽出し、抽出した中心線と路面画像の中心とのずれ量を算出し、このずれ量に基づいて噴射位置の調整量を計算し、さらに、前記抽出した白線検出範囲内の中心線に基づいて区画線の始端位置および終端位置を特定し、特定した位置に基づいて塗料の噴射開始時間および噴射停止時間を計算し、
噴射位置の調整量を示す噴射位置調整信号と、塗料噴射開始のトリガとなる塗料噴射開始トリガ信号とをそれぞれ生成し、これらの信号を塗料の噴射開始時間に間に合うように前記スライド機構および前記塗布装置に向けて送信し、また、塗料噴射停止のトリガとなる塗料噴射停止トリガ信号を生成し、この信号を塗料の噴射停止時間に間に合うように前記塗布装置に向けて送信する、
ことを特徴とする区画線施工車。
続きを表示(約 3,300 文字)
【請求項2】
さらに、前記塗布装置により路面に噴射された塗料の上にビーズを噴射するビーズ散布装置と、
区画線の終端位置に向けて規定量の剥離剤を噴射する剥離剤散布装置と、
を備え、
前記施工制御部は、さらに、
前記特定した区画線の始端位置および終端位置に基づいて、ビーズおよび剥離剤の噴射開始時間およびビーズの噴射停止時間を計算し、
ビーズ噴射開始のトリガとなるビーズ噴射開始トリガ信号を生成し、この信号をビーズの噴射開始時間に間に合うように前記ビーズ散布装置に向けて送信し、
また、ビーズ噴射停止のトリガとなるビーズ噴射停止トリガ信号を生成し、この信号をビーズの噴射停止時間に間に合うように前記ビーズ散布装置に向けて送信し、
また、剥離剤噴射開始のトリガとなる剥離剤噴射開始トリガ信号を生成し、この信号を剥離剤の噴射開始時間に間に合うように前記剥離剤散布装置に向けて送信する、
ことを特徴とする請求項1に記載の区画線施工車。
【請求項3】
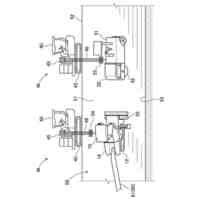
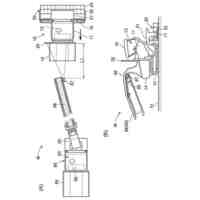
前記ビーズ散布装置、前記剥離剤散布装置は、前記スライド機構によって、前記塗布装置と連動してスライド可能に保持され、
車両前方から、前記剥離剤散布装置、前記塗布装置、前記ビーズ散布装置の順に配設される、
ことを特徴とする請求項2に記載の区画線施工車。
【請求項4】
前記カメラを少なくとも1台で構成し、
前記カメラが複数台構成の場合には、それぞれの撮像領域が一部重複するように設置され、すべてのカメラが同時に撮像することによって前記撮像範囲を撮像し、前記画像処理部が、さらに、同時に撮像された各カメラ画像を合成する画像処理を行うこととし、
前記撮像範囲は、路面の撮像から塗料が噴射開始または噴射停止されるまでに必要な猶予時間に基づいて適宜設定する、
ことを特徴とする請求項3に記載の区画線施工車。
【請求項5】
区画線施工用の塗料を路面に噴射する塗布装置と、当該塗布装置を車幅方向にスライドさせて塗料の噴射位置を調整するスライド機構と、予め設定された撮像範囲の路面を定期的に撮像するカメラと、区画線施工に関する制御処理を実行する制御部および当該制御処理の過程で得られる各種情報を記憶するための記憶部を有する制御装置と、を備え、既設の区画線に沿って走行しながら当該既設の区画線に重ねて新規の区画線を上塗りする区画線施工車による施工方法であって、
区画線に沿って理想的な経路を走行した場合にカメラ画像の中心に区画線が撮像されるように、予め前記カメラに対してキャリブレーションが行われた状態において、
前記制御部は、
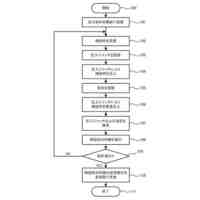
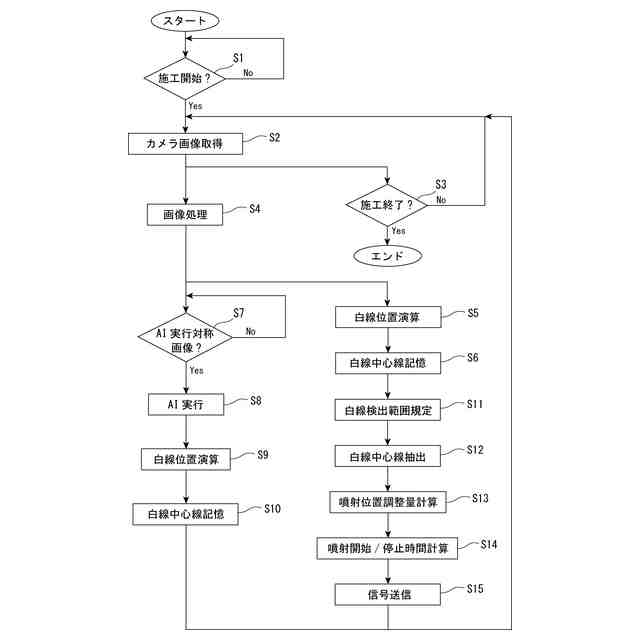
定期的に撮像されたカメラ画像に対し個別に俯瞰化する画像処理を行い、俯瞰化された路面画像を前記記憶部に記憶する画像処理ステップと、
前記画像処理ステップにおいて定期的に生成された路面画像から、白線部分として認識された情報の中心線である第1の中心線を抽出し、当該第1の中心線を前記記憶部に記憶する第1の中心線抽出ステップと、
様々な場所で撮像した区画線が写るカメラ画像に対し前記画像処理を行うことにより生成された不要な情報を含む区画線画像を説明変数とし、当該区画線画像に対しアノテーションを実施することにより不要な情報を削除し区画線の白線部分を抽出した教師画像を目的変数として機械学習を行った学習済みのAI画像生成モデルに、前記画像処理ステップにて生成された路面画像から一定間隔で抽出されたAI実行対象画像を入力することで、区画線の白線部分のみを抽出したAI画像を生成するAI画像生成ステップと、
前記AI画像から、区画線の白線部分における幅方向の中心線である第2の中心線を抽出し、当該第2の中心線を前記記憶部に記憶する第2の中心線抽出ステップと、
前記記憶部に記憶された第2の中心線を読み出し、第2の中心線をつなぎ合わせた予想中心線を求め、その予想中心線に所定の許容幅を持たせた白線検出範囲を規定する検出範囲規定ステップと、
前記記憶部から第1の中心線を読み出し、当該第1の中心線から白線検出範囲内の中心線を抽出し、抽出した中心線と路面画像の中心とのずれ量を算出し、このずれ量に基づいて噴射位置の調整量を計算する調整量計算ステップと、
前記抽出した白線検出範囲内の中心線に基づいて区画線の始端位置および終端位置を特定し、特定した位置に基づいて塗料の噴射開始時間および噴射停止時間を計算する時間計算ステップと、
噴射位置の調整量を示す噴射位置調整信号と、塗料噴射開始のトリガとなる塗料噴射開始トリガ信号とをそれぞれ生成し、これらの信号を塗料の噴射開始時間に間に合うように前記スライド機構および前記塗布装置に向けて送信し、また、塗料噴射停止のトリガとなる塗料噴射停止トリガ信号を生成し、この信号を塗料の噴射停止時間に間に合うように前記塗布装置に向けて送信する信号処理ステップと、
を実行する、
ことを特徴とする施工方法。
【請求項6】
前記区画線施工車は、さらに、前記塗布装置により路面に噴射された塗料の上にビーズを噴射するビーズ散布装置と、区画線の終端位置に向けて規定量の剥離剤を噴射する剥離剤散布装置と、を備え、
前記時間計算ステップにおいては、さらに、
前記特定した区画線の始端位置および終端位置に基づいて、ビーズおよび剥離剤の噴射開始時間およびビーズの噴射停止時間を計算し、
前記信号処理ステップにおいては、さらに、
ビーズ噴射開始のトリガとなるビーズ噴射開始トリガ信号を生成し、この信号をビーズの噴射開始時間に間に合うように前記ビーズ散布装置に向けて送信し、
また、ビーズ噴射停止のトリガとなるビーズ噴射停止トリガ信号を生成し、この信号をビーズの噴射停止時間に間に合うように前記ビーズ散布装置に向けて送信し、
また、剥離剤噴射開始のトリガとなる剥離剤噴射開始トリガ信号を生成し、この信号を剥離剤の噴射開始時間に間に合うように前記剥離剤散布装置に向けて送信する、
ことを特徴とする請求項5に記載の施工方法。
【請求項7】
前記ビーズ散布装置、前記剥離剤散布装置は、前記スライド機構によって、前記塗布装置と連動してスライド可能に保持され、
車両前方から、前記剥離剤散布装置、前記塗布装置、前記ビーズ散布装置の順に配設される、
ことを特徴とする請求項6に記載の施工方法。
【請求項8】
前記カメラを少なくとも1台で構成し、
前記カメラが複数台構成の場合には、それぞれの撮像領域が一部重複するように設置され、すべてのカメラが同時に撮像することによって前記撮像範囲を撮像し、前記画像処理ステップでは、さらに、同時に撮像された各カメラ画像を合成する画像処理を行うこととし、
前記撮像範囲は、路面の撮像から塗料が噴射開始または噴射停止されるまでに必要な猶予時間に基づいて適宜設定する、
ことを特徴とする請求項7に記載の施工方法。
【請求項9】
区画線施工用の塗料を路面に噴射する塗布装置と、当該塗布装置を車幅方向にスライドさせて塗料の噴射位置を調整するスライド機構と、予め設定された撮像範囲の路面を定期的に撮像するカメラと、区画線施工に関する制御処理を実行する制御部および当該制御処理の過程で得られる各種情報を記憶するための記憶部を有する制御装置と、を備えた区画線施工車が、既設の区画線に沿って走行しながら当該既設の区画線に重ねて新規の区画線を上塗りするための施工管理プログラムであって、
前記制御部として動作するコンピュータに、
請求項5~8のいずれか1つに記載の各ステップを含む一連の処理を実行させることを特徴とする施工管理プログラム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、既設の区画線に重ねて新たな区画線を施工する区画線施工車、施工方法および施工管理プログラムに関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
従来から、路面への区画線施工は、区画線施工用の塗料を塗布するための塗布装置を搭載する車両(トラック等)を使用して行われている。具体的には、路面への吹き付け機構を有する塗布装置から約200℃に加熱された溶解塗料を噴射しながら、車両が移動(走行)することによって、区画線施工が行われる。
【0003】
この際、従来の区画線施工においては、車両の走行速度が最速でも時速10km程度であり、塗布装置の性能としては、時速10km走行時において1m
2
あたり3kg程度の噴出能力があれば、充分な精度(均一かつ十分な塗膜厚、区画線の始端位置および終端位置の十分な鮮明さ等)で路面に区画線を形成可能である。
【0004】
たとえば、下記特許文献1には、充分な精度で路面に区画線を形成可能な車両の一例として、カメラ画像の画像処理によりスプレガンの位置を調節しつつ区画線を塗装する道路区画線施工車、が開示されている。
【0005】
具体的にいうと、下記特許文献1に記載の道路区画線施工車は、塗料を吐出するスプレガンを有した塗装装置(上記塗布装置に相当)と、車両前方を撮像する第一カメラと、スプレガンの前方の路面を撮像する第二カメラと、スプレガンの後方の路面を撮像する第三カメラと、制御部とを備える。
【0006】
上記のように構成される道路区画線施工車において、制御部は、各カメラが撮像した画像を合成し、合成画像中の目標線に基づいて仮想線を生成し、仮想線と車両本体との車幅方向の相対位置に基づいて修正信号を出力する。そして、この道路区画線施工車においては、上記修正信号に基づいてスプレガン(塗装装置)の位置を調節しつつスプレガンから塗料を吐出させる。
【0007】
さらに、制御部は、第一カメラおよび第二カメラが撮像した画像に基づいて、既設の区画線の始点と終点の位置を検出する。そして、塗装装置は、制御部が検出した始点と終点の位置に基づいて塗料の吐出開始と吐出終了とを切り換えながら、既設の区画線に重ねて新規の区画線を塗装する。
【先行技術文献】
【特許文献】
【0008】
特開2019-56237号公報(特許6976511)
【発明の概要】
【発明が解決しようとする課題】
【0009】
上述したように、従来から行われている区画線施工は、車両を使用したものではあるが、その走行速度は速くても時速10km程度のゆっくりとした速度を想定したものである。たとえば、上記特許文献1には、第一カメラが撮像した前方画像に理想進路や予想進路を重ねて表示装置に表示させ、運転者が、理想進路に対する予想進路のずれを運転しながら認識し、さらに、予想進路を理想進路に近づけるように表示装置を見ながら進路を修正すること、が記載されている。すなわち、運転者が表示装置を目視で確認しながら運転していることから、上記特許文献1に記載の道路区画線施工車の走行速度は、表示装置を見ながらでも十分に安全運転が可能なゆっくりとした速度を想定したものであることがわかる。
【0010】
一方で、近年、高速道路等においては、施工時間を短縮して早急に施工現場における交通開放を行い、道路状況を可能な限り早く元の状態に戻すことが求められており、これを実現するために、たとえば、高速走行する車両を使用した、区画線施工の高速化技術の開発が進められている。具体的には、たとえば、時速50km走行時においても、充分な精度(均一かつ十分な塗膜厚、区画線の始端位置および終端位置の十分な鮮明さ等)で区画線(たとえば、レーンマーク等)の施工が可能な区画線施工車が求められている。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
信号器材株式会社
塗料供給システム
今日
信号器材株式会社
塗料噴出装置および塗布装置
今日
信号器材株式会社
区画線施工車、施工方法および施工管理プログラム
今日
株式会社熊谷組
床版
7日前
株式会社熊谷組
床版
2か月前
個人
掃除装置
5日前
株式会社熊谷組
床版
2か月前
積水樹脂株式会社
カバー体
5日前
白出商事株式会社
縁石銘板(名板)
2か月前
株式会社セイトク
防雪パネル
1か月前
株式会社パロマ
融雪装置
12日前
コスモテック株式会社
表示装置
1か月前
株式会社 林物産発明研究所
道路安全体
20日前
株式会社ササキコーポレーション
作業機
2か月前
株式会社NIPPO
斜面用ローラ
2か月前
株式会社NIPPO
距離補正装置
2か月前
株式会社NIPPO
斜面用ローラ
2か月前
株式会社NIPPO
切削用制御装置
2か月前
戸田建設株式会社
コンクリート構造
1か月前
三信工業株式会社
床版架設装置
2か月前
桑名金属工業株式会社
融雪マットおよび融雪方法
2か月前
西松建設株式会社
耐震補強方法
12日前
東亜グラウト工業株式会社
防護柵の支柱構造
2か月前
戸田建設株式会社
鋼製ブラケットの取付装置
1か月前
戸田建設株式会社
鋼製ブラケットの取付装置
1か月前
サガ・コア&カッター工業株式会社
切断工法
今日
株式会社丸治コンクリート工業所
防護柵
14日前
株式会社川金コアテック
橋梁用鋼弾塑性ダンパー
28日前
日鉄神鋼建材株式会社
補強金具、及び支柱取付構造
2か月前
個人
充填剤及びそれが充填された人工芝
12日前
西尾レントオール株式会社
コーンベット型電源装置
1か月前
株式会社NIPPO
バンク用建設機械サポータ装置
2か月前
株式会社NIPPO
アスファルトスタッカ制御装置
2か月前
鹿島建設株式会社
床版架設方法
1か月前
日鉄建材株式会社
吊り材で支持された足場用床パネル
2か月前
日立建機株式会社
転圧機械
2か月前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ