TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025177618
公報種別
公開特許公報(A)
公開日
2025-12-05
出願番号
2024084623
出願日
2024-05-24
発明の名称
検出判断装置及び人感センサシステム
出願人
株式会社ジークス
代理人
個人
主分類
G01S
13/52 20060101AFI20251128BHJP(測定;試験)
要約
【課題】ミリ波レーダでは、同じ場所で動きがほとんどない場合に、オブジェクトが長時間にわたって消失(人を検出できなくなる)してしまうという課題を解決する検出判断装置を提供する。
【解決手段】室内又は室外において、ミリ波により対象を検出し、前記対象がオブジェクトかどうかを判断する検出判断装置であって、ミリ波データに基づく前記対象に対応する点群データを制御する点群データ制御部を備え、前記点群データ制御部は、前記対象の信号雑音比(SNR値, signal-nose ratio)を算出し、前記信号雑音比を用いて前記対象の状態を判断する、検出判断装置。
【選択図】図1
特許請求の範囲
【請求項1】
室内又は室外において、ミリ波によりオブジェクトを検出し、前記オブジェクトが人であると判断することが可能な検出判断装置であって、
ミリ波データに基づく前記オブジェクトに対応する点群データを制御する点群データ制御部を備え、
前記点群データ制御部は、前記オブジェクトの信号雑音比(SNR値, signal-nose ratio)を算出し、前記信号雑音比を用いて前記オブジェクトの状態を判断する、検出判断装置。
続きを表示(約 980 文字)
【請求項2】
前記点群データ制御部は、前記オブジェクトの状態を判断した上で、グリッドリストに登録される、請求項1に記載の検出判断装置。
【請求項3】
前記点群データ制御部は、前記オブジェクトが下記のいずれかの状態であることを特定する、請求項2に記載の検出判断装置。
(A)新たにオブジェクトとして検出されたときのActive状態、
(B)オブジェクトが、動きがある人又は物であると認識されているLive状態、
(C)オブジェクトとして認識されないVanish状態、
(D)動きがない又は微動の人又は物であると認識されているGuard状態、及び
(E)前記(B)から前記(D)への移行状態(Live_Inc状態)。
【請求項4】
前記Active状態において、前記オブジェクトのSNR値を算出し、前記SNR値が所定の閾値よりも低い場合は、前記Vanish状態であると特定され、前記オブジェクトの点群データは、前記グリッドリストに登録されない、又は前記グリッドリストから削除される、請求項3に記載の検出判断装置。
【請求項5】
前記Live状態の前記オブジェクトの点群データが検出されなくなったときに、前記Live状態から前記Guard状態に移行し、前記Guard状態において、所定の時間経過し、点群オブジェクトとして再検出されなければ、前記Vanish状態であると判断され、再検出されれば、前記Live状態に移行する、請求項3に記載の検出判断装置。
【請求項6】
前記点群データ制御部は、測定領域のフレームを連続的に生成し、得られる複数のフレームを重ね合わせることにより、前記オブジェクトを特定する、請求項1に記載の人感センサシステム。
【請求項7】
室内又は室外において、人を感知する人感センサシステムであって、
請求項1乃至6のいずれか一項に記載の検出装置と、
ミリ波電波を送信する送信機と、前記ミリ波電波がオブジェクトで反射した反射電波を計測する受信機を備えるミリ波レーダと、
ミリ波受信領域に対応するグリッド平面図と、前記オブジェクトに対応する前記グリッドとを表示する表示部を含む人感センサシステム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、室内又は室外において、人を感知することが可能な検出判断装置及びそれを備える人感システムに関する。
続きを表示(約 3,100 文字)
【背景技術】
【0002】
従来、30G~300GHzの周波数のミリ波の電磁波を使用する人感センサが開発されている。例えば、特許文献1は、ミリ波を使用する監視エリアに侵入する物体(人)を検知する侵入検知システムが開示されている。
【先行技術文献】
【特許文献】
【0003】
特開2022-98637号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ミリ波は、直進性が高く、高距離分解能及び高角度分解能を有し、物体の距離や速度を正確に得ることができるという特徴を有するが、その一方で、同じ場所で動きがほとんどない場合に、オブジェクトが長時間にわたって消失(人を検出できなくなる)してしまうという物理的性質がある。また、人ではない物が、動く場合は、人であると誤認識してしまう場合がある。
本発明は、そのような課題を解決するためのミリ波を用いる検出判断装置及び人感センサシステムを提供するものである。
【課題を解決するための手段】
【0005】
[1] 室内又は室外において、ミリ波によりオブジェクトを検出し、前記オブジェクトが人であると判断することが可能な検出判断装置であって、
ミリ波データに基づく前記オブジェクトに対応する点群データを制御する点群データ制御部を備え、
前記点群データ制御部は、前記オブジェクトの信号雑音比(SNR値, signal-nose ratio)を算出し、前記信号雑音比を用いて前記オブジェクトの状態を判断する、検出判断装置。
[2] 前記点群データ制御部は、前記オブジェクトの状態を判断した上で、グリッドリストに登録される、[1]に記載の検出判断装置。
[3] 前記点群データ制御部は、前記オブジェクトが下記のいずれかの状態であることを特定する、[2]に記載の検出判断装置。
(A)新たにオブジェクトとして検出されたときのActive状態、
(B)オブジェクトが、動きがある人又は物であると認識されているLive状態、
(C)オブジェクトとして認識されないVanish 状態、
(D)動きがない又は微動の人又は物であると認識されているGuard状態、及び
(E)前記(B)から前記(D)への移行状態(Live_Inc状態)。
[4] 前記Active状態において、前記オブジェクトのSNR値を算出し、前記SNR値が所定の閾値よりも低い場合は、前記Vanish状態であると特定され、前記オブジェクトの点群データは、前記グリッドリストに登録されない、又は前記グリッドリストから削除される、[3]に記載の検出判断装置。
[5] 前記Live状態の前記オブジェクトの点群データが検出されなくなったときに、前記Live状態から前記Guard状態に移行し、前記Guard状態において、所定の時間経過し、点群オブジェクトとして再検出されなければ、前記Vanish状態であると判断され、再検出されれば、前記Live状態に移行する、請求項3に記載の検出判断装置。
[6] 前記点群データ制御部は、測定領域のフレームを連続的に生成し、得られる複数のフレームを重ね合わせることにより、前記オブジェクトを特定する、[1]に記載の人感センサシステム。
[7] 室内又は室外において、人を感知する人感センサシステムであって、
[1]乃至[6]のいずれか一項に記載の検出装置と、
ミリ波電波を送信する送信機と、前記ミリ波電波がオブジェクトで反射した反射電波を計測する受信機を備えるミリ波レーダと、
ミリ波受信領域に対応するグリッド平面図と、前記オブジェクトに対応する前記グリッドとを表示する表示部を含む人感センサシステム。
【発明の効果】
【0006】
本発明の検出判断装置は、SNR値を用いることにより、好ましくは検出対象を複数のステータスに特定することにより、同じ場所で人間の動きがほとんどない場合に、その人間が長時間にわかって消失(人を検出できなくなる)してしまうという、ミリ波レーダによる検出における物理的性質を解決することが可能となり、システム上、消失せずに判別することができる。また、好ましくは、オブジェクトが人であると特定された場合でも、その後のオブジェクトの状態把握により、オブジェクトが人以外(例えば、生物的でない物)であると特定する状態を変更することが可能である。
【図面の簡単な説明】
【0007】
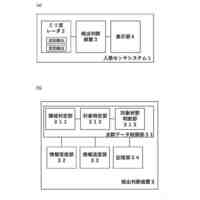
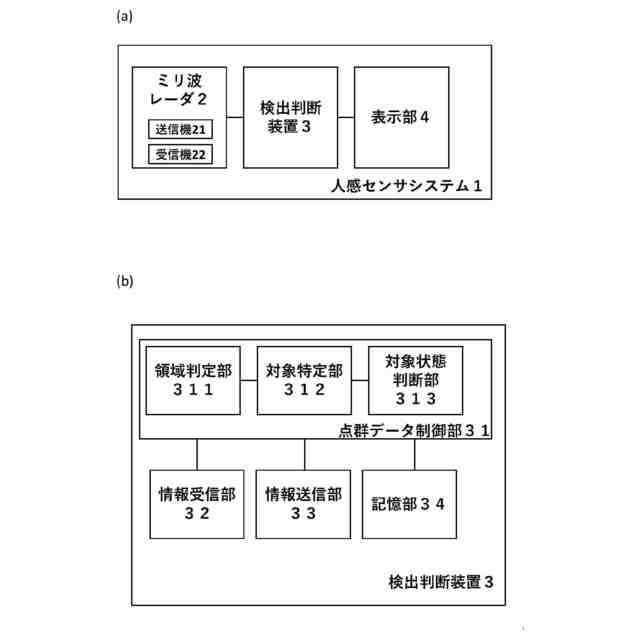
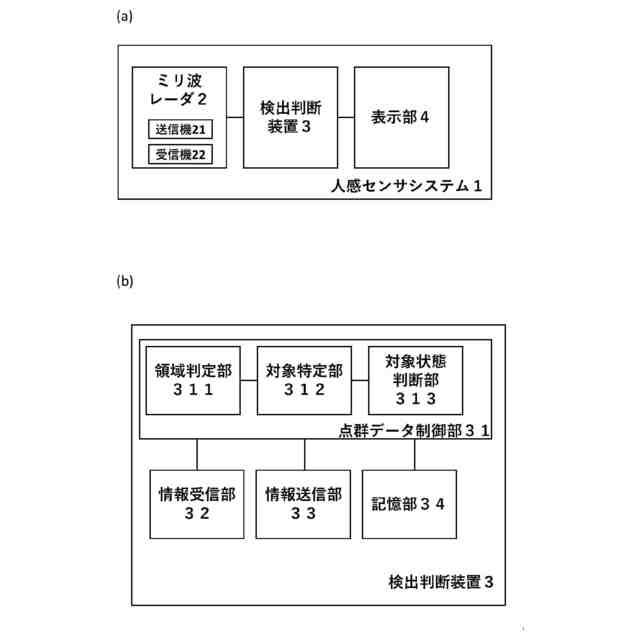
図1は本発明の人感センサシステムの構成図の一例である。
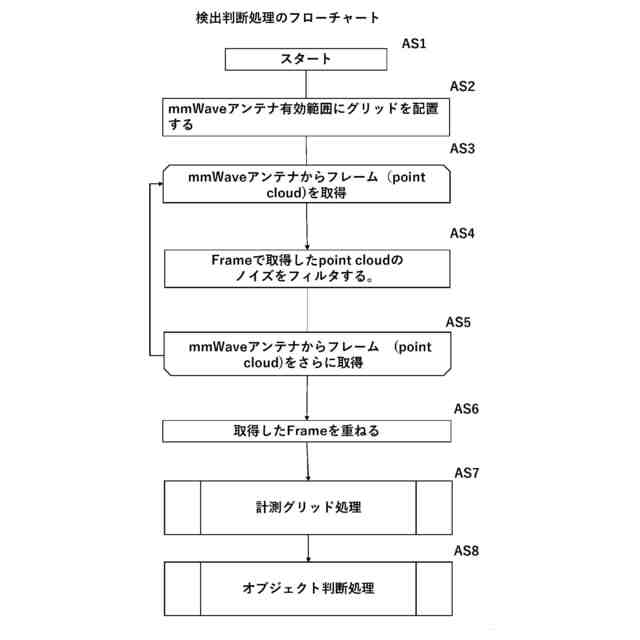
図2は、本発明の検出判断装置を用いることによる検出判断処理のフローチャートである。
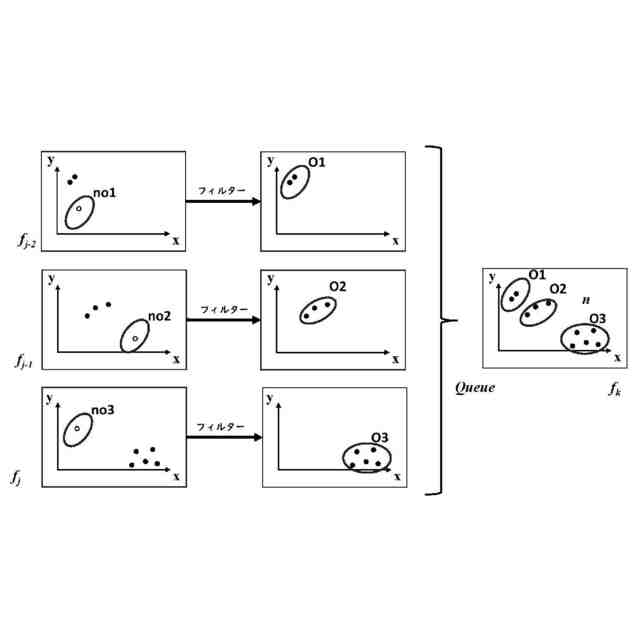
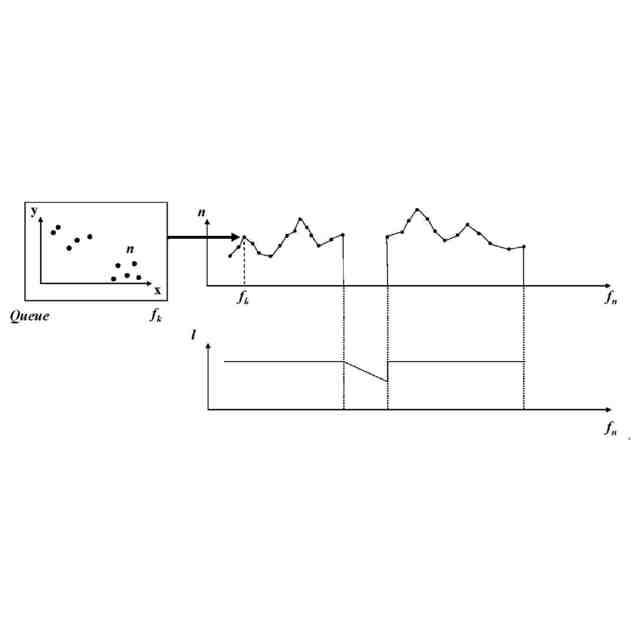
図3Aは、本発明の検出判断装置における、ノイズをフィルタリングした後、フレームを合成した例である。
図3Bは、本発明の検出判断装置における、ポイントクラウドの経時的変化の例である。
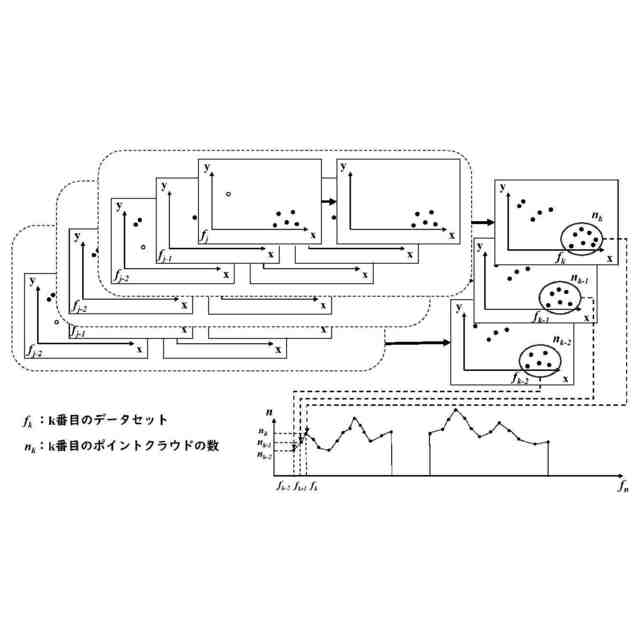
図4は、本発明の検出判断装置において、フィルタリングしたフレームの一つのオブジェクトに関して、時系列的にポイントクラウドの数をグラフ化した図である。
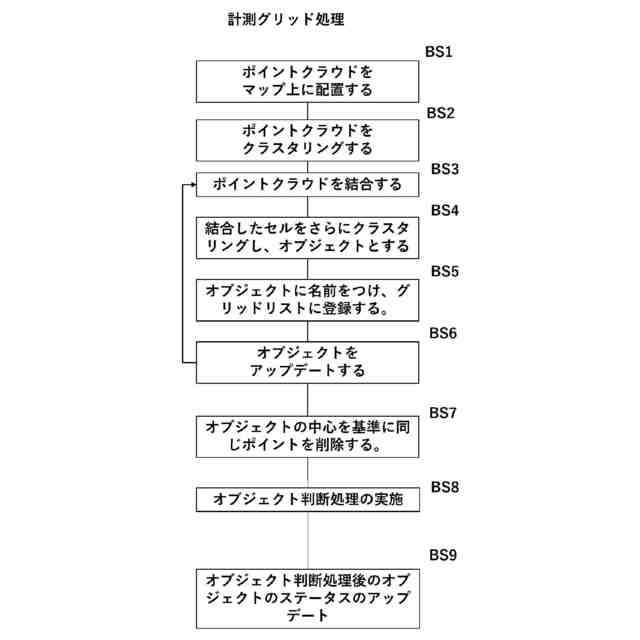
図5は、本発明の検出判断装置において、計測グリッド処理の工程を示す図である。
図6は、本発明の検出判断装置において、オブジェクト判断処理を行う工程を示す図である。
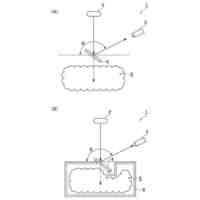
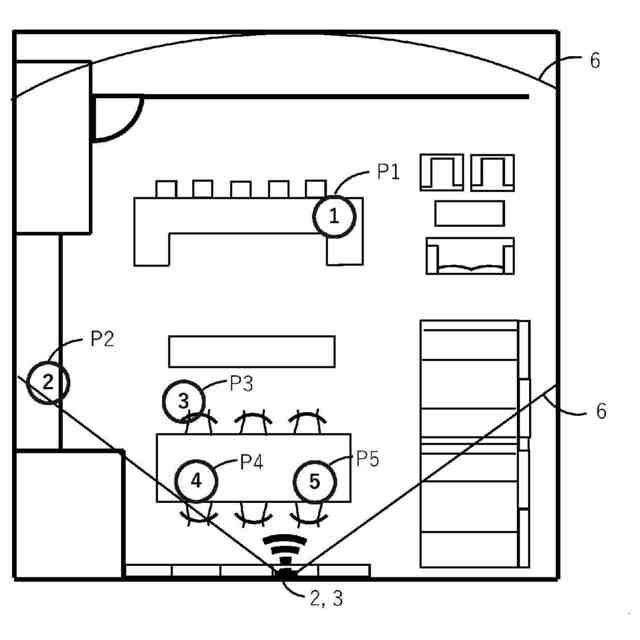
図7は、ミリ波レーダ2から室内の様子を見た画像の一例である。
図8は、図7の室内の平面図である。
図9は、ミリ波レーダ2から室内の様子を見た画像の一例である。
図10は、図9の室内の平面図である。
【発明を実施するための形態】
【0008】
以下、本発明の検出判断装置、及び、人感センサシステムについて詳細に説明するが、本発明は下記の説明に限定されるものではなく、本発明の趣旨を損なわない限り、当業者に知識に基づいて必要に応じ変更できるものである。
なお、本明細書において検出判断装置によって検出された人は、人のみを含めるものではなく、いかなる生物を包含する。一方、検出判断装置によって判断された物は、人や他の生物ではない物(生物的でない物)を意味する。
【0009】
図1は本発明の人感センサシステムの構成図の一例である。図1に示すように、本発明の人感センサシステム1は、ミリ波レーダ2、検出判断装置3及び表示部4から構成することができる。互いの接続は、無線又は有線によりデータが送受信できればよく、インターネット上で接続されていてもよい。
【0010】
[ミリ波レーダ]
ミリ波レーダ2は、ミリ波電波を送信する送信機21と、送信したミリ波電波が対象であるオブジェクトにより反射した反射電波を計測する受信機22を備える。ここで、送信機21と受信機22は、一つの筐体内に配置されなくてもよく、別々に配置されていてもよい。本明細書では、ミリ波の電磁波を送信する送信機21と受信する受信機22とを概念上備えるものをミリ波レーダ2とする。
ミリ波レーダ2は、ミリ波電波を送信する送信機21と、送信したミリ波電波が対象で反射した反射電波を計測する受信機22を備えていれば、特に限定されるものではない。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社ジークス
検出判断装置及び人感センサシステム
1日前
個人
視触覚センサ
1日前
日本精機株式会社
検出装置
1か月前
個人
採尿及び採便具
1か月前
個人
計量機能付き容器
26日前
個人
アクセサリー型テスター
1か月前
個人
高精度同時多点測定装置
1か月前
株式会社カクマル
境界杭
16日前
株式会社ミツトヨ
測定器
1か月前
日本精機株式会社
発光表示装置
9日前
甲神電機株式会社
電流検出装置
1か月前
ユニパルス株式会社
トルク変換器
1日前
ユニパルス株式会社
トルク変換器
1日前
ユニパルス株式会社
トルク変換器
1日前
株式会社トプコン
測量装置
8日前
アズビル株式会社
電磁流量計
1か月前
大成建設株式会社
風洞実験装置
26日前
トヨタ自動車株式会社
監視装置
1か月前
ダイキン工業株式会社
監視装置
1か月前
日本特殊陶業株式会社
ガスセンサ
24日前
個人
計量具及び計量機能付き容器
26日前
個人
システム、装置及び実験方法
1か月前
愛知電機株式会社
軸部材の外観検査装置
1か月前
大和製衡株式会社
組合せ計量装置
1か月前
大和製衡株式会社
組合せ計量装置
1か月前
双庸電子株式会社
誤配線検査装置
1か月前
個人
非接触による電磁パルスの測定方法
29日前
日本特殊陶業株式会社
ガスセンサ
2日前
日本特殊陶業株式会社
ガスセンサ
8日前
TDK株式会社
磁気センサ
1か月前
日本信号株式会社
距離画像センサ
29日前
日本特殊陶業株式会社
ガスセンサ
1日前
愛知時計電機株式会社
ガスメータ
1か月前
ローム株式会社
半導体装置
1か月前
ローム株式会社
半導体装置
1か月前
長崎県
形状計測方法
1か月前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ