TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025173951
公報種別
公開特許公報(A)
公開日
2025-11-28
出願番号
2024079852
出願日
2024-05-16
発明の名称
作業システム
出願人
トヨタ自動車株式会社
代理人
弁理士法人明成国際特許事務所
主分類
G05D
1/24 20240101AFI20251120BHJP(制御;調整)
要約
【課題】作業に用いる台車を作業状況に応じて自動で移動できる技術を提供する。
【解決手段】作業システムは、作業場所を俯瞰して撮像する1以上の定点カメラと、無人運転により移動可能な1以上の台車であって、作業に用いる工具と、作業対象物に組み付ける部品と、を収容する収容部と、台車と台車の周辺領域とを撮像する1以上の台車カメラと、を有する1以上の台車と、台車の動作を制御する制御装置であって、撮像画像を取得する取得部と、撮像画像を学習済みの機械学習モデルに入力することで、撮像画像が表す物体の画像上での位置および姿勢を基に、撮像画像が表す作業が複数の作業工程のうちいずれであるかを判断する判断部と、判断部により判断された作業工程に応じた位置に台車を移動させる動作制御部と、を有する制御装置と、を備える。
【選択図】図1
特許請求の範囲
【請求項1】
作業システムであって、
作業場所を俯瞰して撮像する1以上の定点カメラと、
無人運転により移動可能な1以上の台車であって、
作業に用いる工具と、作業対象物に組み付ける部品と、を収容する収容部と、
前記台車と前記台車の周辺領域とを撮像する1以上の台車カメラと、を有する1以上の台車と、
前記台車の動作を制御する制御装置であって、
前記定点カメラと前記台車カメラとの少なくとも一方から出力される撮像画像を取得する取得部と、
前記撮像画像を学習済みの機械学習モデルに入力することで、前記撮像画像が表す物体の画像上での位置および姿勢を基に、前記撮像画像が表す作業が複数の作業工程のうちいずれであるかを判断する判断部と、
前記判断部により判断された前記作業工程に応じた位置に前記台車を移動させる動作制御部と、を有する制御装置と、を備える、作業システム。
発明の詳細な説明
【技術分野】
【0001】
本開示は、作業システムに関する。
続きを表示(約 2,100 文字)
【背景技術】
【0002】
従来、人、車両、可動ロボット、自律車両等の移動している先導体を追尾する追尾車両が知られている(特許文献1)。この技術では、追尾車両は、カメラ等のセンサから出力されるセンサデータを用いて先導体の位置を計算して、先導体を追尾するように走行する。
【先行技術文献】
【特許文献】
【0003】
特表2023-537700号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
従来の技術では、追尾車両は、走行エリアに存在する先導体以外の物体の動作や配置を解析したり、追尾車両の周辺状況を時系列に沿って解析したりすることなく、適宜に先導体の位置を計算して走行している。そのため、追尾車両の周辺状況に応じて追尾車両が自律的に走行したり、走行エリアに存在する作業者等の可動物の次の動作を予測して先行的に走行したりすることは困難である。このような課題は、追尾車両に限らず、作業対象物に作業をする作業場所において工具や部品を収容して運搬する台車にも共通する。
【課題を解決するための手段】
【0005】
本開示は、以下の形態として実現することが可能である。
【0006】
本開示の一形態によれば、作業システムが提供される。作業システムは、作業場所を俯瞰して撮像する1以上の定点カメラと、無人運転により移動可能な1以上の台車であって、作業に用いる工具と、作業対象物に組み付ける部品と、を収容する収容部と、前記台車と前記台車の周辺領域とを撮像する1以上の台車カメラと、を有する1以上の台車と、前記台車の動作を制御する制御装置であって、前記定点カメラと前記台車カメラとの少なくとも一方から出力される撮像画像を取得する取得部と、前記撮像画像を学習済みの機械学習モデルに入力することで、前記撮像画像が表す物体の画像上での位置および姿勢を基に、前記撮像画像が表す作業が複数の作業工程のうちいずれであるかを判断する判断部と、前記判断部により判断された前記作業工程に応じた位置に前記台車を移動させる動作制御部と、を有する制御装置と、を備える。この形態によれば、制御装置は、作業場所に存在する複数の物体の動作や配置から作業場所における作業状況を時系列に沿って解析できる。これにより、制御装置は、作業状況に応じて、必要なタイミングで好適な位置に台車を自動で移動させたり、作業場所に存在する作業者等の可動物の次の動作を予測して台車を先行的に移動させたりできる。
本開示は、上記の作業システム以外の種々の形態で実現することが可能である。例えば、作業システムの製造方法、作業システムの制御方法、その制御方法を実現するコンピュータプログラム、そのコンピュータプログラムを記録した一時的でない記録媒体等の形態で実現することができる。
【図面の簡単な説明】
【0007】
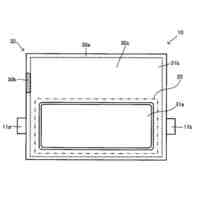
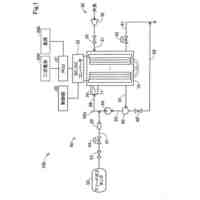
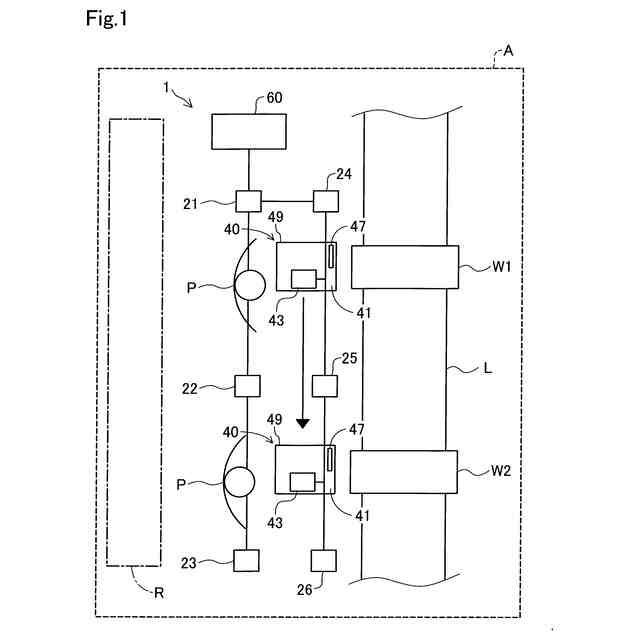
作業システムの構成を示す図。
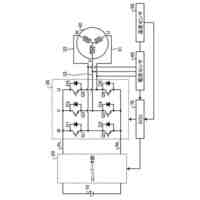
中央制御装置の構成を示すブロック図。
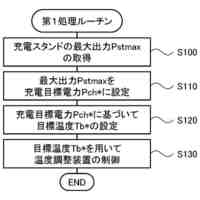
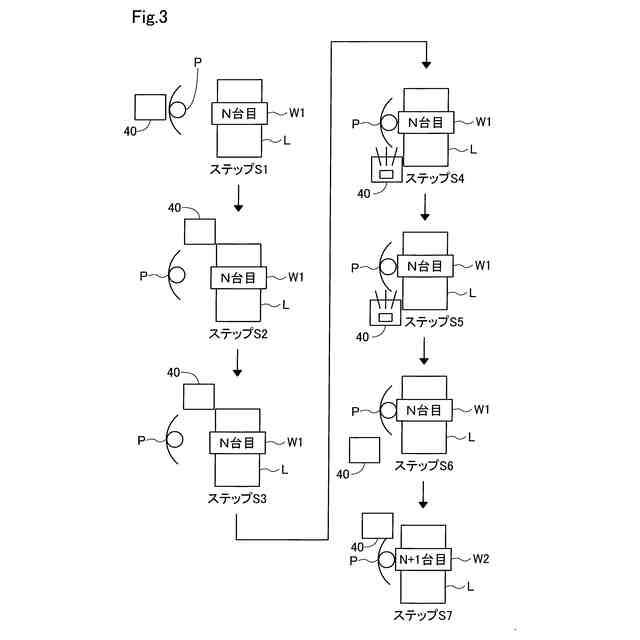
作業システムの動作フローの一例を示す図。
【発明を実施するための形態】
【0008】
A.第1実施形態:
図1は、作業システム1の構成を示す図である。作業システム1は、作業場所Aにおいて作業者Pが作業対象物W1,W2に作業をするために用いられる。本実施形態では、作業対象物W1,W2は、車両である。作業場所Aは、車両を製造する工場である。工場は、例えば、作業ラインLと、準備エリアRとを含む。作業ラインLでは、コンベア等の搬送設備により作業対象物W1,W2が搬送される。作業者Pは、作業ラインL上を搬送される作業対象物W1,W2の予め定められた組み付け位置に、予め定められた工具を用いて、予め定められた部品を組み付ける。準備エリアRでは、作業に用いる工具と、作業対象物W1,W2に組み付ける部品と、の少なくとも一方が台車40上に準備される。作業者Pは、準備エリアRに設置された棚であって、工具や部品を保管する棚を開けて、所望の工具や部品を把持して取り出す。そして、作業者Pは、取り出した工具や部品を台車40の予め定められた位置にセットし、棚を閉める。つまり、本実施形態では、部品の選択と組み付けとを分離した作業方式により作業が実行される。部品の選択と組み付けとを分離した作業方式を「SPS(Set Parts Supply)」ともいう。
【0009】
作業システム1は、1以上の定点カメラ21~26と、1以上の台車40と、中央制御装置60とを備える。
【0010】
定点カメラ21~26は、作業場所Aを俯瞰して撮像する。定点カメラ21~26は、図示しない通信装置を備えており、有線通信あるいは無線通信により、中央制御装置60等の他の装置と通信できる。定点カメラ21~26は、例えば、作業場所Aの天井、壁、支柱等の支持部材に固定されている。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
トヨタ自動車株式会社
電池
今日
トヨタ自動車株式会社
方法
22日前
トヨタ自動車株式会社
車体
22日前
トヨタ自動車株式会社
電池
8日前
トヨタ自動車株式会社
電池
23日前
トヨタ自動車株式会社
電池
14日前
トヨタ自動車株式会社
電池
今日
トヨタ自動車株式会社
車両
22日前
トヨタ自動車株式会社
配管
9日前
トヨタ自動車株式会社
車両
8日前
トヨタ自動車株式会社
車両
9日前
トヨタ自動車株式会社
車両
22日前
トヨタ自動車株式会社
蓄電池
22日前
トヨタ自動車株式会社
モータ
21日前
トヨタ自動車株式会社
電動車
9日前
トヨタ自動車株式会社
電動車
8日前
トヨタ自動車株式会社
ロータ
9日前
トヨタ自動車株式会社
反応容器
8日前
トヨタ自動車株式会社
蓄電装置
8日前
トヨタ自動車株式会社
蓄電装置
8日前
トヨタ自動車株式会社
エンジン
8日前
トヨタ自動車株式会社
コネクタ
8日前
トヨタ自動車株式会社
判定装置
8日前
トヨタ自動車株式会社
蓄電装置
1日前
トヨタ自動車株式会社
蓄電装置
1日前
トヨタ自動車株式会社
蓄電装置
今日
トヨタ自動車株式会社
蓄電装置
今日
トヨタ自動車株式会社
蓄電装置
今日
トヨタ自動車株式会社
処理装置
今日
トヨタ自動車株式会社
制御装置
今日
トヨタ自動車株式会社
蓄電装置
今日
トヨタ自動車株式会社
蓄電装置
今日
トヨタ自動車株式会社
制御装置
8日前
トヨタ自動車株式会社
学習装置
8日前
トヨタ自動車株式会社
樹脂外板
22日前
トヨタ自動車株式会社
路側装置
21日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ