TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025170478
公報種別
公開特許公報(A)
公開日
2025-11-19
出願番号
2024075068
出願日
2024-05-07
発明の名称
クレーン停止時振れ止め制御方法
出願人
株式会社日立プラントメカニクス
代理人
個人
主分類
B66C
13/22 20060101AFI20251112BHJP(巻上装置;揚重装置;牽引装置)
要約
【課題】目標位置停止後に振れの状態を把握し、目標停止位置から外れることなく、最小移動距離で振れ止めを行うようにしたクレーン停止時振れ止め制御方法を提供すること。
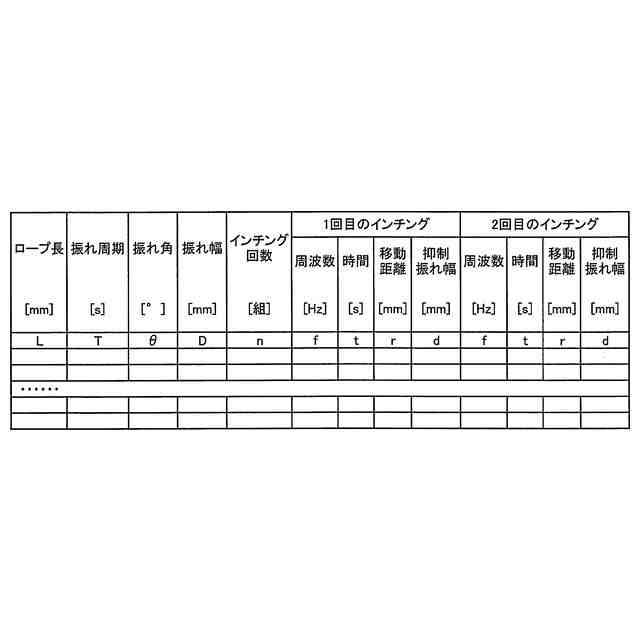
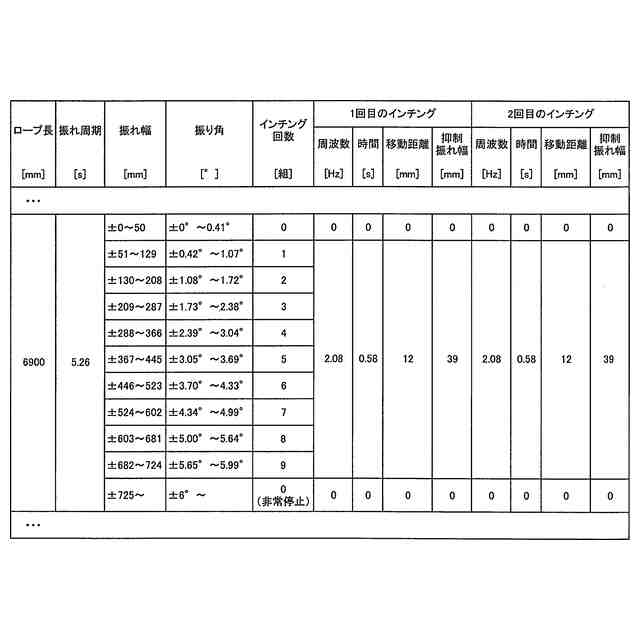
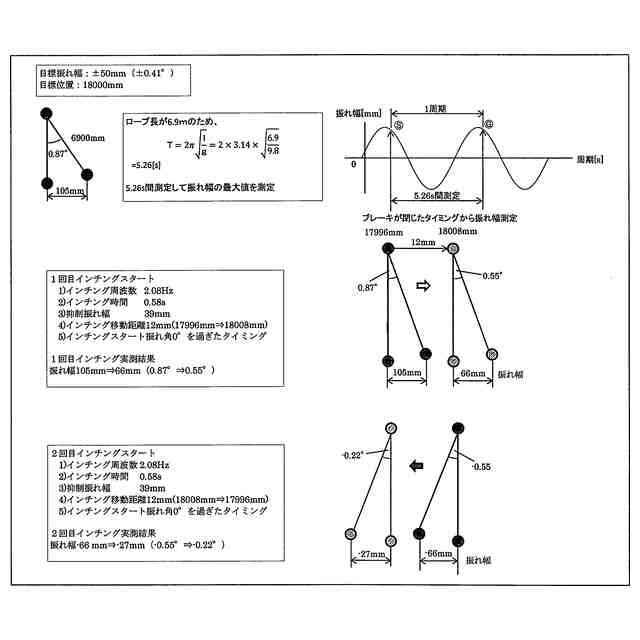
【解決手段】クレーンの目的位置到達後、クレーンが一旦停止した状態で、ロープ長L[mm]及び振れ角θ[°]から振れ周期T[s]及び振れ幅D[mm]を測定し、測定した振れ周期T[s]及び振れ幅D[mm]に基づき、予め用意したインチングテーブルのインバータがモータに与えるインチング回数n[回]、インチング周波数f[Hz]、インチング時間t[s]、インチング移動距離r[mm]及び抑制振れ幅d[mm]をパラメータとして選定、設定し、選定、設定したパラメータに基づくインチング動作と、同じインチング周波数f[Hz]、インチング時間t[s]で、かつ、インチング方向を反対方向としたインチング動作を1組としてインチング動作を行う。
【選択図】図2
特許請求の範囲
【請求項1】
クレーンの目的位置到達後に振れ止めと位置合わせを併せて行うようにしたクレーン停止時振れ止め制御方法であって、
前記クレーンの目的位置到達後、クレーンが一旦停止した状態で、ロープ長L[mm]及び振れ角θ[°]から振れ周期T[s]及び振れ幅D[mm]を測定し、
前記測定した振れ周期T[s]及び振れ幅D[mm]に基づき、予め用意したインチングテーブルのインバータがモータに与えるインチング回数n[回]、インチング周波数f[Hz]、インチング時間t[s]、インチング移動距離r[mm]及び抑制振れ幅d[mm]をパラメータとして選定、設定し、
前記選定、設定したパラメータに基づくインチング動作と、同じインチング周波数f[Hz]、インチング時間t[s]で、かつ、インチング方向を反対方向としたインチング動作を1組としてインチング動作を行うようにする
ことを特徴とするクレーン停止時振れ止め制御方法。
続きを表示(約 280 文字)
【請求項2】
前記インチング動作を、複数組行うようにすることを特徴とする請求項1に記載のクレーン停止時振れ止め制御方法。
【請求項3】
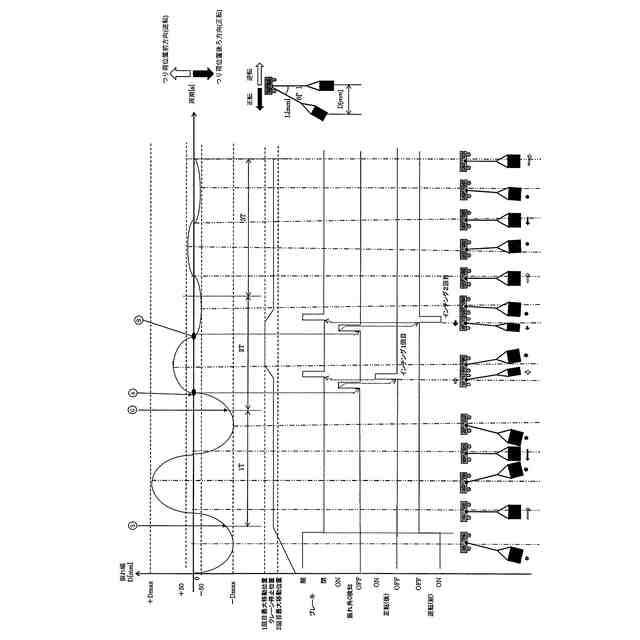
前記インチング動作を、振れ角θ[°]が、0°を通過したタイミングから振れ方向に行うようにすることを特徴とする請求項1又は2に記載のクレーン停止時振れ止め制御方法。
【請求項4】
前記測定した振れ幅D[mm]が、クレーンが一旦停止した状態で、ロープ長L[mm]に対する振れ周期1T[s]間に測定した最大振れ幅であることを特徴とする請求項1又は2に記載のクレーン停止時振れ止め制御方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、クレーンの目的位置到達後に振れ止めと位置合わせを併せて行うようにしたクレーン停止時振れ止め制御方法に関するものである。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
従来、クレーンの振れ止め制御は、位相面軌跡に合わせて振れ止め制御を行っている(例えば、特許文献1参照。)。
そして、特に、自動クレーンでは、目標位置到着時に振れ止めと位置合わせの両方を行う必要がある。具体的には、目標位置到着後に予め設定された位置ずれ値と振れ幅の両方を含め、クレーンの位置精度の条件が一定値以下になった段階でつり荷を巻下可能としている。位置ずれ値と振れ幅を合算したクレーンの位置精度を設定値として、例えば、±100mmにして運用している。
位相面軌跡に合わせた振れ止め制御は、モータの速度を位相面軌跡上の角度と角速度に合わせたタイミングで、インバータ周波数について、加速、一定速、減速を行い、つり荷が振れないように姿勢制御しているが、機械ブレーキの使用頻度が高い場合に摩擦抵抗の変化による動作遅れが発生し、クレーン停止後に振れ止まり待ちが発生し、作業効率が低下することが課題となっていた。
また、手動クレーンにおいても、位相面軌跡に関係なくオペレータが操作するタイミングで加減速を行うため、クレーン停止後に振れが発生し、振れ止まり待ちが発生し、作業効率が低下することが課題となっていた。
【先行技術文献】
【特許文献】
【0003】
特開平3-056394号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
本発明は、この問題点に鑑み、自動クレーン、手動クレーンにかかわらず、目標位置停止後に振れの状態を把握し、目標停止位置から外れることなく、最小移動距離で振れ止めを行うようにしたクレーン停止時振れ止め制御方法を提供することを目的とする。
【課題を解決するための手段】
【0005】
上記目的を達成するため、本発明のクレーン停止時振れ止め制御方法は、
クレーンの目的位置到達後に振れ止めと位置合わせを併せて行うようにしたクレーン停止時振れ止め制御方法であって、
前記クレーンの目的位置到達後、クレーンが一旦停止した状態で、ロープ長L[mm]及び振れ角θ[°]から振れ周期T[s]及び振れ幅D[mm]を測定し、
前記測定した振れ周期T[s]及び振れ幅D[mm]に基づき、予め用意したインチングテーブルのインバータがモータに与えるインチング回数n[回]、インチング周波数f[Hz]、インチング時間t[s]、インチング移動距離r[mm]及び抑制振れ幅d[mm]をパラメータとして選定、設定し、
前記選定、設定したパラメータに基づくインチング動作と、同じインチング周波数f[Hz]、インチング時間t[s]で、かつ、インチング方向を反対方向としたインチング動作を1組としてインチング動作を行うようにする
ことを特徴とする。
ここで、前記インチング動作は、2回(1組)以上の複数組(4回以上の偶数回)行うようにすることができる。
【0006】
この場合において、前記インチング動作を、振れ角θ[°]が、0°を通過したタイミングから振れ方向に行うようにすることができる。
【0007】
また、前記測定した振れ幅D[mm]が、クレーンが一旦停止した状態で、ロープ長L[mm]に対する振れ周期1T[s]間に測定した最大振れ幅とすることができる。
【発明の効果】
【0008】
本発明のクレーン停止時振れ止め制御方法によれば、自動クレーン、手動クレーンにかかわらず、目標位置停止後に振れの状態を把握し、目標停止位置から外れることなく、最小移動距離で振れ止めを行うことができ、クレーン停止後に発生する振れ止まり待ち時間を短縮して、クレーンによる荷役作業の作業効率を向上することができる。より具体的には、目標位置停止後につり荷の振れ幅が、例えば、±50mmを超えている場合に、最小移動範囲で振れ止め制御が可能となり、これにより、金型のような狭い範囲にセットする作業や、つり荷が壁際に寄った状態でも、振れ止め制御が可能である。
【図面の簡単な説明】
【0009】
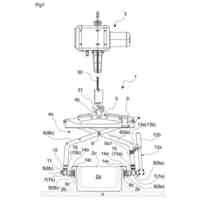
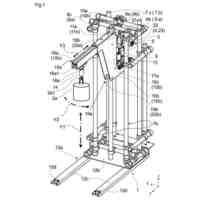
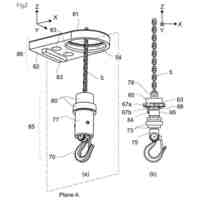
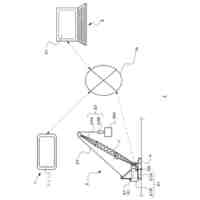
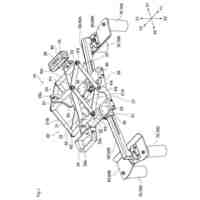
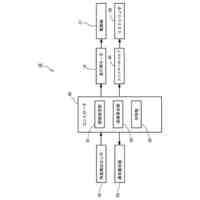
本発明のクレーン停止時振れ止め制御方法を実施するためのクレーンのシステム構成図である。
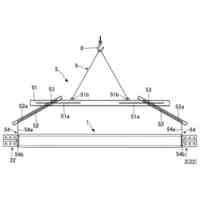
本発明のクレーン停止時振れ止め制御方法の機械ブレーキを含めた振れ止め制御の説明図である。
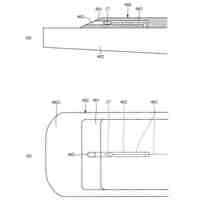
本発明のクレーン停止時振れ止め制御方法を実施した測定データである。
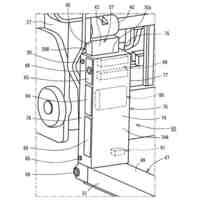
本発明のクレーン停止時振れ止め制御方法を実施した測定データの説明図である。
【発明を実施するための形態】
【0010】
以下、本発明のクレーン停止時振れ止め制御方法の実施の形態について、図面に基づいて説明する。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
自走手摺
4か月前
個人
転落防止階段
21日前
ユニパルス株式会社
吊具
5か月前
個人
小型クレーン
15日前
個人
海上コンテナ昇降装置
11か月前
ユニパルス株式会社
荷役装置
10か月前
ユニパルス株式会社
吊具装置
11か月前
株式会社豊田自動織機
産業車両
2か月前
株式会社豊田自動織機
荷役車両
10か月前
水戸工業株式会社
吊り具
7か月前
ユニパルス株式会社
リフト装置
5か月前
株式会社いうら
車椅子用昇降機
3か月前
株式会社豊田自動織機
荷役車両
11か月前
ユニパルス株式会社
荷役助力装置
5か月前
株式会社伊藤
滑り止め装置
3か月前
愛知製鋼株式会社
受け架台
3か月前
岐阜工業株式会社
運搬台車
22日前
個人
垂直自動搬送機
2か月前
大栄産業株式会社
クランプ
6か月前
ユニパルス株式会社
荷役助力装置
4か月前
個人
エアバック式レスキュー用品
1か月前
株式会社大林組
安全支援システム
2か月前
ユニパルス株式会社
荷役助力装置
6か月前
白山工業株式会社
バランサ
8か月前
株式会社キトー
タイヤ用吊具
6か月前
個人
アウトリガー用転倒防止ベース
14日前
株式会社ユピテル
システム等
7か月前
大和ハウス工業株式会社
吊上具
3か月前
中国計量大学
電子安全クランプ
1か月前
株式会社豊田自動織機
フォークリフト
8か月前
株式会社豊田自動織機
フォークリフト
2か月前
新英運輸株式会社
自動車用台車
6か月前
フジテック株式会社
エレベータ
10か月前
株式会社五十鈴製作所
搬送装置
5か月前
フジテック株式会社
エスカレータ
7か月前
中坪造園有限会社
吊り荷降ろし具
5か月前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ