TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025169033
公報種別
公開特許公報(A)
公開日
2025-11-12
出願番号
2024073985
出願日
2024-04-30
発明の名称
車両制御装置、車両制御方法及びプログラム
出願人
トヨタ自動車株式会社
代理人
個人
,
個人
,
個人
,
個人
,
個人
,
個人
主分類
B60W
50/00 20060101AFI20251105BHJP(車両一般)
要約
【課題】周辺状況センサの限界検知距離が短い時に自車両の制御が不適切に実行されるおそれを抑制する。
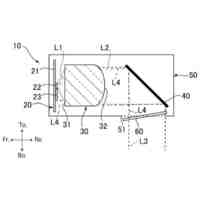
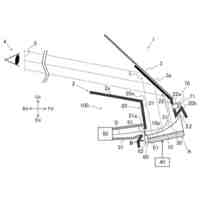
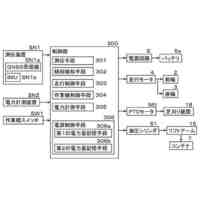
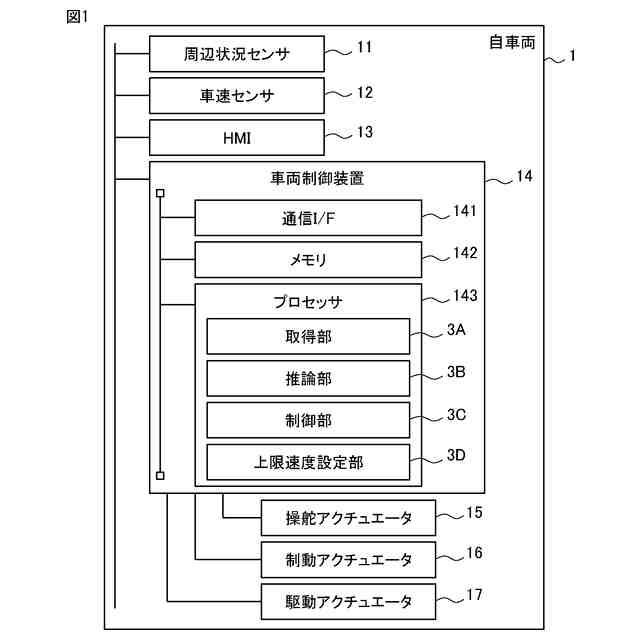
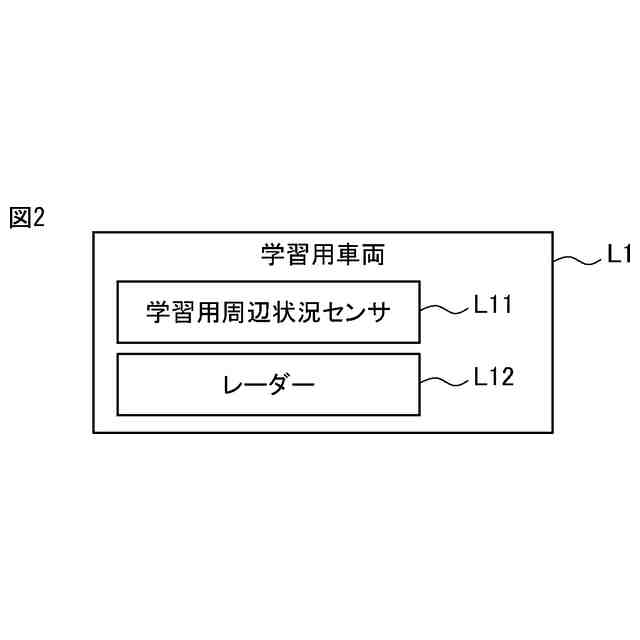
【解決手段】車両制御装置14は、自車両1に搭載された周辺状況センサ11によって検知可能な周辺状況センサ11からの距離の最大値である限界検知距離を推論する推論部3Bを備え、推論部3Bは、学習用車両L1に搭載された学習用周辺状況センサL11のセンサデータと、学習用周辺状況センサL11のセンサデータが得られた時における学習用周辺状況センサL11の限界検知距離を示すラベルとのデータセットである教師データを用いた学習を行うことによって得られた機械学習モデルを用いることにより、周辺状況センサ11のセンサデータに基づいて、周辺状況センサ11の限界検知距離を推論する。
【選択図】図1
特許請求の範囲
【請求項1】
自車両に搭載された周辺状況センサによって検知可能な前記周辺状況センサからの距離の最大値である限界検知距離を推論する推論部を備え、
前記推論部は、学習用車両に搭載された学習用周辺状況センサのセンサデータと、前記学習用周辺状況センサのセンサデータが得られた時における前記学習用周辺状況センサの限界検知距離を示すラベルとのデータセットである教師データを用いた学習を行うことによって得られた機械学習モデルを用いることにより、前記周辺状況センサのセンサデータに基づいて、前記周辺状況センサの限界検知距離を推論する、車両制御装置。
続きを表示(約 1,000 文字)
【請求項2】
前記学習用周辺状況センサの限界検知距離として、前記学習用周辺状況センサのセンサデータに基づいて前記学習用車両の先行車を検知可能な状態と、前記学習用周辺状況センサのセンサデータに基づいて前記先行車を検知不可能な状態とが切り替わる時に前記学習用車両に搭載されたレーダーによって検知された前記学習用車両と前記先行車との車間距離が用いられる、請求項1に記載の車両制御装置。
【請求項3】
前記自車両の運転支援の実行中における前記自車両の上限速度を設定する上限速度設定部を備え、
前記上限速度設定部は、前記推論部によって推論された前記周辺状況センサの限界検知距離が閾値以下の場合に、前記自車両の先行車と前記自車両との車間距離が前記推論部によって推論された限界検知距離に概略等しいと想定し、前記先行車に追従走行可能な速度を前記上限速度として設定する、請求項1に記載の車両制御装置。
【請求項4】
車両制御装置が、自車両に搭載された周辺状況センサによって検知可能な前記周辺状況センサからの距離の最大値である限界検知距離を推論する推論ステップを備え、
前記推論ステップでは、学習用車両に搭載された学習用周辺状況センサのセンサデータと、前記学習用周辺状況センサのセンサデータが得られた時における前記学習用周辺状況センサの限界検知距離を示すラベルとのデータセットである教師データを用いた学習を行うことによって得られた機械学習モデルを用いることにより、前記周辺状況センサのセンサデータに基づいて、前記周辺状況センサの限界検知距離が推論される、車両制御方法。
【請求項5】
プロセッサに、自車両に搭載された周辺状況センサによって検知可能な前記周辺状況センサからの距離の最大値である限界検知距離を推論する推論ステップを実行させるためのプログラムであって、
前記推論ステップでは、学習用車両に搭載された学習用周辺状況センサのセンサデータと、前記学習用周辺状況センサのセンサデータが得られた時における前記学習用周辺状況センサの限界検知距離を示すラベルとのデータセットである教師データを用いた学習を行うことによって得られた機械学習モデルを用いることにより、前記周辺状況センサのセンサデータに基づいて、前記周辺状況センサの限界検知距離が推論される、プログラム。
発明の詳細な説明
【技術分野】
【0001】
本開示は、車両制御装置、車両制御方法及びプログラムに関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
特許文献1には、降雨量の大きさを検知する降雨量検知手段を備えた車間距離警報装置により、降雨量の大きさに応じて車間距離警報やACCの設定を変更し、ドライバへの報知を行う技術について記載されている。
【先行技術文献】
【特許文献】
【0003】
特開2004-230910号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1に記載された技術では、降雨量が所定量を超えた場合に、自車両速度を小さくする制御が行われるとともに警報を発すべき前方の物体までの距離が小さく設定されるものの、例えば濃霧による悪天候時、降雪(乾雪の降雪)による悪天候時等(具体的には、車載センサが前方の物体を検知できない時)に自車両の制御を適切に行うことができない。
【0005】
上述した点に鑑み、本開示は、自車両に搭載された周辺状況センサの限界検知距離が短い時(具体的には、周辺状況センサが自車両の先行車を検知できない時)に自車両の制御が不適切に実行されるおそれを抑制することができる車両制御装置、車両制御方法及びプログラムを提供することを目的とする。
【課題を解決するための手段】
【0006】
(1)本開示の一態様は、自車両に搭載された周辺状況センサによって検知可能な前記周辺状況センサからの距離の最大値である限界検知距離を推論する推論部を備え、前記推論部は、学習用車両に搭載された学習用周辺状況センサのセンサデータと、前記学習用周辺状況センサのセンサデータが得られた時における前記学習用周辺状況センサの限界検知距離を示すラベルとのデータセットである教師データを用いた学習を行うことによって得られた機械学習モデルを用いることにより、前記周辺状況センサのセンサデータに基づいて、前記周辺状況センサの限界検知距離を推論する、車両制御装置である。
【0007】
(2)(1)の車両制御装置では、前記学習用周辺状況センサの限界検知距離として、前記学習用周辺状況センサのセンサデータに基づいて前記学習用車両の先行車を検知可能な状態と、前記学習用周辺状況センサのセンサデータに基づいて前記先行車を検知不可能な状態とが切り替わる時に前記学習用車両に搭載されたレーダーによって検知された前記学習用車両と前記先行車との車間距離が用いられてもよい。
【0008】
(3)(1)又は(2)の車両制御装置は、前記自車両の運転支援の実行中における前記自車両の上限速度を設定する上限速度設定部を備え、前記上限速度設定部は、前記推論部によって推論された前記周辺状況センサの限界検知距離が閾値以下の場合に、前記自車両の先行車と前記自車両との車間距離が前記推論部によって推論された限界検知距離に概略等しいと想定し、前記先行車に追従走行可能な速度を前記上限速度として設定してもよい。
【0009】
(4)本開示の一態様は、車両制御装置が、自車両に搭載された周辺状況センサによって検知可能な前記周辺状況センサからの距離の最大値である限界検知距離を推論する推論ステップを備え、前記推論ステップでは、学習用車両に搭載された学習用周辺状況センサのセンサデータと、前記学習用周辺状況センサのセンサデータが得られた時における前記学習用周辺状況センサの限界検知距離を示すラベルとのデータセットである教師データを用いた学習を行うことによって得られた機械学習モデルを用いることにより、前記周辺状況センサのセンサデータに基づいて、前記周辺状況センサの限界検知距離が推論される、車両制御方法である。
【0010】
(5)本開示の一態様は、プロセッサに、自車両に搭載された周辺状況センサによって検知可能な前記周辺状況センサからの距離の最大値である限界検知距離を推論する推論ステップを実行させるためのプログラムであって、前記推論ステップでは、学習用車両に搭載された学習用周辺状況センサのセンサデータと、前記学習用周辺状況センサのセンサデータが得られた時における前記学習用周辺状況センサの限界検知距離を示すラベルとのデータセットである教師データを用いた学習を行うことによって得られた機械学習モデルを用いることにより、前記周辺状況センサのセンサデータに基づいて、前記周辺状況センサの限界検知距離が推論される、プログラムである。
【発明の効果】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
上部一体型自動車
2か月前
個人
空間形成装置
1か月前
個人
マスタシリンダ
2か月前
日本精機株式会社
照明装置
1か月前
個人
常設収納型サンバイザー
1か月前
株式会社豊田自動織機
産業車両
1か月前
個人
回転窓ワイパー装置
1か月前
日本精機株式会社
車載表示装置
1か月前
日本精機株式会社
画像投映装置
2か月前
株式会社ニフコ
収納装置
3か月前
日本精機株式会社
車載表示装置
1か月前
日本精機株式会社
車載表示装置
2か月前
日本精機株式会社
車載表示装置
1か月前
株式会社SUBARU
車両
2か月前
日本精機株式会社
車両用投影装置
2か月前
日本精機株式会社
車両用投射装置
2か月前
個人
聴覚と触覚を利用する速度計
3日前
個人
音による速度計とプログラム
1か月前
日本精機株式会社
車両用表示装置
2か月前
日本精機株式会社
車両用報知装置
1か月前
井関農機株式会社
作業車両
2か月前
日産自動車株式会社
伝動部材
2か月前
日本化薬株式会社
ガス発生器
12日前
日本化薬株式会社
ガス発生器
3日前
日本化薬株式会社
ガス発生器
2か月前
日本化薬株式会社
ガス発生器
5日前
日本化薬株式会社
ガス発生器
2か月前
エムケー精工株式会社
車両処理装置
2か月前
日本化薬株式会社
ガス発生器
2か月前
帝人株式会社
衝撃吸収構造体
3か月前
日本化薬株式会社
ガス発生器
1か月前
日本化薬株式会社
ガス発生器
2か月前
個人
自動車の非常ブレーキアシスト
3か月前
株式会社小糸製作所
車両用灯具
2か月前
株式会社アイシン
空気袋
2か月前
株式会社小糸製作所
車両用灯具
10日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ