TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025168048
公報種別
公開特許公報(A)
公開日
2025-11-07
出願番号
2024073163
出願日
2024-04-26
発明の名称
車両の制御装置、車両の制御方法、及びコンピュータプログラム
出願人
トヨタ自動車株式会社
代理人
個人
,
個人
,
個人
,
個人
,
個人
,
個人
,
個人
主分類
B60W
30/17 20200101AFI20251030BHJP(車両一般)
要約
【課題】ドライバの行動と同様の行動を実施させることが難しい走行シーンに対する対処を、必要に応じてドライバに促すことができるようにする。
【解決手段】車両100の制御装置5は、車両100の走行制御を伴う運転支援の実施中において、渋滞区間又は渋滞が予想される区間を走行している場合に車両100と当該車両100の前走車両との間への他車両の割り込み回数が所定回数以上になったときは、運転支援の運転制御レベルを下げるか、又は車両のドライバに対して運転交代を要求するように構成される。
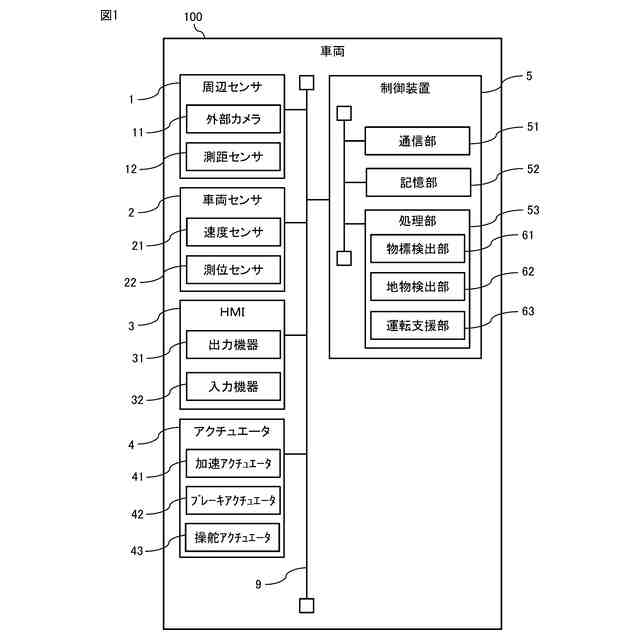
【選択図】図1
特許請求の範囲
【請求項1】
車両の制御装置であって、
前記車両の走行制御を伴う運転支援の実施中において、渋滞区間又は渋滞が予想される区間を走行している場合に前記車両と当該車両の前走車両との間への他車両の割り込み回数が所定回数以上になったときは、前記運転支援の運転制御レベルを下げるか、又は前記車両のドライバに対して運転交代を要求するように構成される、
車両の制御装置。
続きを表示(約 580 文字)
【請求項2】
前記運転支援は、前記前走車両との車間距離を適切な車間距離に保ちながら追従走行を行う運転支援である、
請求項1に記載の車両の制御装置。
【請求項3】
車両の制御方法であって、
前記車両の走行制御を伴う運転支援の実施中に、渋滞区間又は渋滞が予想される区間を走行しているかを判定し、
渋滞区間又は渋滞が予想される区間を走行している場合に、前記車両と当該車両の前走車両との間への他車両の割り込み回数が所定回数以上になったかを判定し、
前記割り込み回数が前記所定回数以上になった場合に、前記運転支援の運転制御レベルを下げるか、又は前記車両のドライバに対して運転交代を要求する、
車両の制御方法。
【請求項4】
車両の走行制御を伴う運転支援の実施中に、渋滞区間又は渋滞が予想される区間を走行しているかを判定し、
渋滞区間又は渋滞が予想される区間を走行している場合に、前記車両と当該車両の前走車両との間への他車両の割り込み回数が所定回数以上になったかを判定し、
前記割り込み回数が前記所定回数以上になった場合に、前記運転支援の運転制御レベルを下げるか、又は前記車両のドライバに対して運転交代を要求する、
処理をコンピュータに実行させるコンピュータプログラム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、車両の制御装置、車両の制御方法、及びコンピュータプログラムに関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
特許文献1には、従来の車両の制御装置として、隣接車線を走行する他車両の挙動及び位置に基づいて、自車両と、自車両と同じ走行車線(自車線)を走行する前走車両と、の車間距離を短くしたり長くしたりするように構成されたものが開示されている。これにより、他車両が自車両と前走車両との間に無理に割り込まないように、又は安全に割り込むことができるようにしている。
【先行技術文献】
【特許文献】
【0003】
特開2021-14175号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
車両の発進停止や低速走行が続く渋滞区間の合流シーンでは、合流車線の車両を、本車線を走行する車両と交互に1台ずつ本車線に合流させることが一般的に行われている。しかしながら、安全を考慮して、運転支援中に他車両が自車両と前走車両との間に割り込みやすくなるようにしていると、渋滞区間の合流シーンでは、自車両と前走車両との間に何台もの他車両を合流させてしまうおそれがある。すなわち、渋滞区間の合流シーンでは、ドライバの行動と同様の行動を車両の制御装置に実施させることが難しいという問題点がある。
【0005】
本発明は、このような問題点に着目してなされたものであり、ドライバの行動と同様の行動を実施させることが難しい渋滞区間の合流シーンでの対処を、必要に応じてドライバに促すことができるようにすることを目的とする。
【課題を解決するための手段】
【0006】
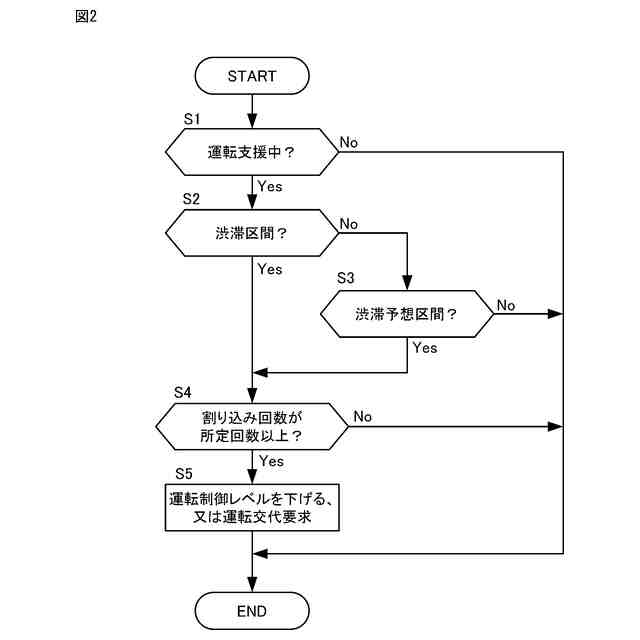
上記課題を解決するために、本発明のある態様による車両の制御装置は、車両の走行制御を伴う運転支援の実施中において、渋滞区間又は渋滞が予想される区間を走行している場合に車両と当該車両の前走車両との間への他車両の割り込み回数が所定回数以上になったときは、運転支援の運転制御レベルを下げるか、又は車両のドライバに対して運転交代を要求するように構成される。
【0007】
また、本発明のある態様による車両の制御方法は、車両の走行制御を伴う運転支援の実施中に、渋滞区間又は渋滞が予想される区間を走行しているかを判定し、渋滞区間又は渋滞が予想される区間を走行している場合は、車両と当該車両の前走車両との間への他車両の割り込み回数が所定回数以上になったかを判定し、割り込み回数が所定回数以上になった場合は、運転支援の運転制御レベルを下げるか、又は車両のドライバに対して運転交代を要求する。
【0008】
また、本発明のある態様によるコンピュータプログラムは、車両の走行制御を伴う運転支援の実施中に、渋滞区間又は渋滞が予想される区間を走行しているかを判定し、渋滞区間又は渋滞が予想される区間を走行している場合は、車両と当該車両の前走車両との間への他車両の割り込み回数が所定回数以上になったかを判定し、割り込み回数が前記所定回数以上になった場合は、運転支援の運転制御レベルを下げるか、又は車両のドライバに対して運転交代を要求する、処理をコンピュータに実行させる。
【発明の効果】
【0009】
本発明のこれらの態様によれば、ドライバの行動と同様の行動を実施させることが難しい渋滞区間の合流シーンでの対処を、必要に応じてドライバに促すことができる。
【図面の簡単な説明】
【0010】
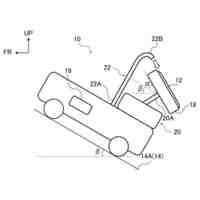
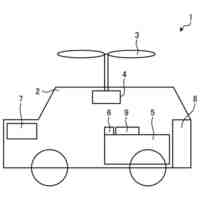
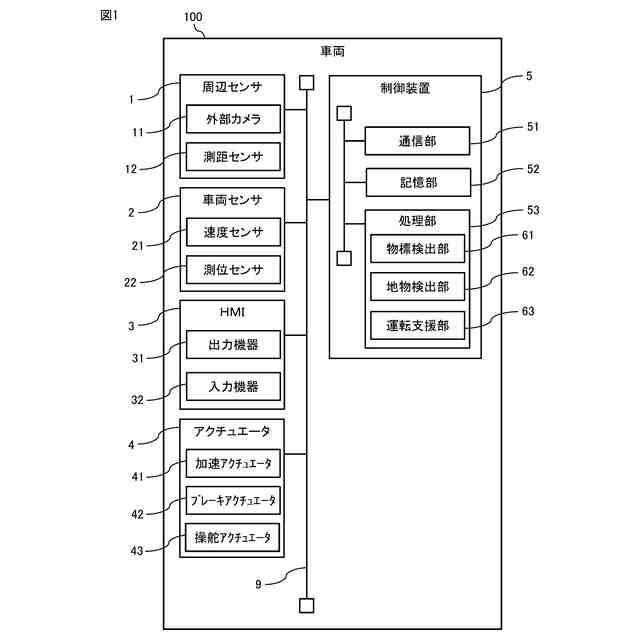
本発明の一実施形態による車両の概略構成図である。
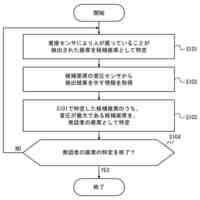
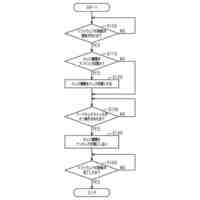
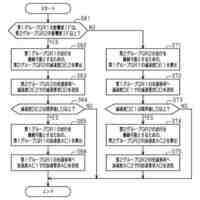
運転支援制御の一例について説明するフローチャートである。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
トヨタ自動車株式会社
方法
21日前
トヨタ自動車株式会社
電池
28日前
トヨタ自動車株式会社
方法
8日前
トヨタ自動車株式会社
電池
21日前
トヨタ自動車株式会社
車両
28日前
トヨタ自動車株式会社
方法
23日前
トヨタ自動車株式会社
車両
23日前
トヨタ自動車株式会社
車体
8日前
トヨタ自動車株式会社
車両
8日前
トヨタ自動車株式会社
車両
21日前
トヨタ自動車株式会社
車両
8日前
トヨタ自動車株式会社
車両
17日前
トヨタ自動車株式会社
車両
9日前
トヨタ自動車株式会社
治具
16日前
トヨタ自動車株式会社
車体
24日前
トヨタ自動車株式会社
電池
9日前
トヨタ自動車株式会社
方法
22日前
トヨタ自動車株式会社
車両
15日前
トヨタ自動車株式会社
車両
1か月前
トヨタ自動車株式会社
車両
15日前
トヨタ自動車株式会社
車両
22日前
トヨタ自動車株式会社
電池
今日
トヨタ自動車株式会社
方法
22日前
トヨタ自動車株式会社
モータ
7日前
トヨタ自動車株式会社
自動車
22日前
トヨタ自動車株式会社
モータ
23日前
トヨタ自動車株式会社
飛行体
28日前
トヨタ自動車株式会社
モータ
18日前
トヨタ自動車株式会社
電動機
21日前
トヨタ自動車株式会社
サーバ
18日前
トヨタ自動車株式会社
モータ
29日前
トヨタ自動車株式会社
正極層
21日前
トヨタ自動車株式会社
蓄電池
8日前
トヨタ自動車株式会社
電動車両
8日前
トヨタ自動車株式会社
蓄電装置
21日前
トヨタ自動車株式会社
報知装置
23日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ