TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025163524
公報種別
公開特許公報(A)
公開日
2025-10-29
出願番号
2024066866
出願日
2024-04-17
発明の名称
農業車両、農業車両の制御方法及びプログラム
出願人
株式会社クボタ
代理人
個人
,
個人
主分類
A01B
69/00 20060101AFI20251022BHJP(農業;林業;畜産;狩猟;捕獲;漁業)
要約
【課題】選択された自動走行に対応した設定値を使用することができる農業車両、農業車両の制御方法及びコンピュータプログラムを提供する。
【解決手段】農業車両は、基準走行ラインに平行に設定される第1設定走行ラインに沿って自動操舵によって機体が走行する第1自動走行と、基準走行ラインに平行に設定され、前記基準走行ラインに交差する方向の間隔が等しい複数の第2設定走行ラインに沿って前記機体が走行する第2自動走行とのいずれかを選択し、前記第1自動走行が選択され、前記第1設定走行ラインと、前記機体の方位に沿った方位ラインとのなす角度の大きさが第1角度以内である場合、前記第1自動走行を実行し、前記第2自動走行が選択され、前記第2設定走行ラインと、前記機体の方位に沿った方位ラインとのなす角度の大きさが前記第1角度よりも大きい第2角度以内である場合、前記第2自動走行を実行する処理を実行する制御部を備える。
【選択図】図19
特許請求の範囲
【請求項1】
基準走行ラインに平行に設定される第1設定走行ラインに沿って自動操舵によって機体が走行する第1自動走行と、前記基準走行ラインに平行に設定され、前記基準走行ラインに交差する方向の間隔が等しい複数の第2設定走行ラインに沿って前記機体が走行する第2自動走行とのいずれかを選択し、
前記第1自動走行が選択され、前記第1設定走行ラインと、前記機体の方位に沿った方位ラインとのなす角度の大きさが第1角度以内である場合、前記第1自動走行を実行し、
前記第2自動走行が選択され、前記第2設定走行ラインと、前記機体の方位に沿った方位ラインとのなす角度の大きさが前記第1角度よりも大きい第2角度以内である場合、前記第2自動走行を実行する
処理を実行する制御部
を備える農業車両。
続きを表示(約 1,400 文字)
【請求項2】
表示部を備え、
前記制御部は、
前記第2自動走行の実行中に前記機体が旋回し、前記第2設定走行ラインと前記方位ラインとのなす角度の大きさが前記第2角度以内になった場合、前記第2角度以内になったことを表示する信号を前記表示部に送信する
処理を実行する
請求項1に記載の農業車両。
【請求項3】
前記制御部は、
前記第2自動走行の実行中に前記機体が旋回する場合、前記方位ラインからの角度の範囲であって、前記範囲の大きさが前記第2角度と同じ範囲を表示する信号を前記表示部に送信する
処理を実行する
請求項2に記載の農業車両。
【請求項4】
前記制御部は、
前記第1自動走行の実行中に前記機体が旋回し、前記第1設定走行ラインと前記方位ラインとのなす角度の大きさが前記第1角度以内になった場合、前記第1角度以内になったことを表示する信号を前記表示部に送信する
処理を実行し、
前記表示部における前記第1角度以内になったことを示す表示と、前記表示部における前記第2角度以内になったことを示す表示とは異なる
請求項2に記載の農業車両。
【請求項5】
前記制御部は、
前記第2自動走行が選択され、前記第2設定走行ラインと、前記方位ラインとのなす角度の大きさが前記第2角度以内でない場合、前記第2自動走行を実行せず、
前記第2設定走行ラインと、前記方位ラインとのなす角度の大きさが前記第2角度以内になる操作を促すための信号を前記表示部に送信する
処理を実行する
請求項2から4のいずれか一つに記載の農業車両。
【請求項6】
基準走行ラインに平行に設定される第1設定走行ラインに沿って自動操舵によって機体が走行する第1自動走行と、前記基準走行ラインに平行に設定され、前記基準走行ラインに交差する方向の間隔が等しい複数の第2設定走行ラインに沿って前記機体が走行する第2自動走行とのいずれかを選択し、
前記第1自動走行が選択され、前記第1設定走行ラインと、前記機体の方位に沿った方位ラインとのなす角度の大きさが第1角度以内である場合、前記第1自動走行を実行し、
前記第2自動走行が選択され、前記第2設定走行ラインと、前記機体の方位に沿った方位ラインとのなす角度の大きさが前記第1角度よりも大きい第2角度以内である場合、前記第2自動走行を実行する
農業車両の制御方法。
【請求項7】
基準走行ラインに平行に設定される第1設定走行ラインに沿って自動操舵によって機体が走行する第1自動走行と、前記基準走行ラインに平行に設定され、前記基準走行ラインに交差する方向の間隔が等しい複数の第2設定走行ラインに沿って前記機体が走行する第2自動走行とのいずれかを選択し、
前記第1自動走行が選択され、前記第1設定走行ラインと、前記機体の方位に沿った方位ラインとのなす角度の大きさが第1角度以内である場合、前記第1自動走行を実行し、
前記第2自動走行が選択され、前記第2設定走行ラインと、前記機体の方位に沿った方位ラインとのなす角度の大きさが前記第1角度よりも大きい第2角度以内である場合、前記第2自動走行を実行する
処理をコンピュータに実行させるプログラム。
発明の詳細な説明
【技術分野】
【0001】
本技術は、圃場を走行する農業車両、農業車両の制御方法及びプログラムに関する。
続きを表示(約 2,600 文字)
【背景技術】
【0002】
圃場を走行する機体において、機体の方位と、圃場に設定された設定走行ラインとのなす角度と、設定値とを比較し、角度が設定値を超えた場合、設定走行ラインに沿った直線的な移動を行うための自動走行制御を停止させる作業車が提案されている。角度が設定値を超えた場合、機体の運転者は、角度が設定値以内になるように、手動で操舵する。角度が設定値以内になった場合、自動走行制御が再開される(特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
特許第6645844号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
複数種類の自動走行からいずれかの自動走行を選択する仕様である場合、選択された自動走行に対応した設定値を使用することが望ましい。
【0005】
本開示は斯かる事情に鑑みてなされたものであり、選択された自動走行に対応した設定値を使用することができる農業車両、農業車両の制御方法及びコンピュータプログラムを提供することを目的とする。
【課題を解決するための手段】
【0006】
本開示の一実施形態に係る農業車両は、基準走行ラインに平行に設定される第1設定走行ラインに沿って自動操舵によって機体が走行する第1自動走行と、前記基準走行ラインに平行に設定され、前記基準走行ラインに交差する方向の間隔が等しい複数の第2設定走行ラインに沿って前記機体が走行する第2自動走行とのいずれかを選択し、前記第1自動走行が選択され、前記第1設定走行ラインと、前記機体の方位に沿った方位ラインとのなす角度の大きさが第1角度以内である場合、前記第1自動走行を実行し、前記第2自動走行が選択され、前記第2設定走行ラインと、前記機体の方位に沿った方位ラインとのなす角度の大きさが前記第1角度よりも大きい第2角度以内である場合、前記第2自動走行を実行する処理を実行する制御部を備える。
【0007】
本開示の一実施形態に係る農業車両の制御方法は、基準走行ラインに平行に設定される第1設定走行ラインに沿って自動操舵によって機体が走行する第1自動走行と、前記基準走行ラインに平行に設定され、前記基準走行ラインに交差する方向の間隔が等しい複数の第2設定走行ラインに沿って前記機体が走行する第2自動走行とのいずれかを選択し、前記第1自動走行が選択され、前記第1設定走行ラインと、前記機体の方位に沿った方位ラインとのなす角度の大きさが第1角度以内である場合、前記第1自動走行を実行し、前記第2自動走行が選択され、前記第2設定走行ラインと、前記機体の方位に沿った方位ラインとのなす角度の大きさが前記第1角度よりも大きい第2角度以内である場合、前記第2自動走行を実行する。
【0008】
本開示の一実施形態に係るプログラムは、基準走行ラインに平行に設定される第1設定走行ラインに沿って自動操舵によって機体が走行する第1自動走行と、前記基準走行ラインに平行に設定され、前記基準走行ラインに交差する方向の間隔が等しい複数の第2設定走行ラインに沿って前記機体が走行する第2自動走行とのいずれかを選択し、前記第1自動走行が選択され、前記第1設定走行ラインと、前記機体の方位に沿った方位ラインとのなす角度の大きさが第1角度以内である場合、前記第1自動走行を実行し、前記第2自動走行が選択され、前記第2設定走行ラインと、前記機体の方位に沿った方位ラインとのなす角度の大きさが前記第1角度よりも大きい第2角度以内である場合、前記第2自動走行を実行する処理をコンピュータに実行させる。
【発明の効果】
【0009】
本開示の一実施形態に係る農業車両、農業車両の制御方法及びコンピュータプログラムにあっては、第1設定走行ラインと機体の方位に沿った方位ラインとのなす角度を、第1角度と比較し、第1自動走行を実行するか否か判定し、第2設定走行ラインと機体の方位に沿った方位ラインとのなす角度を、第2角度と比較し、第2自動走行を実行するか否か判定する。即ち、選択された自動走行に対応した設定値を使用することができる。
【図面の簡単な説明】
【0010】
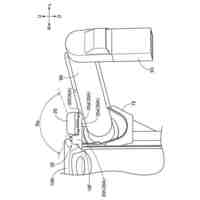
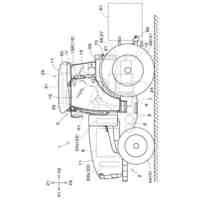
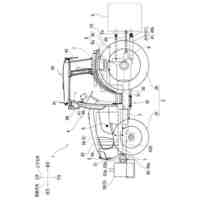
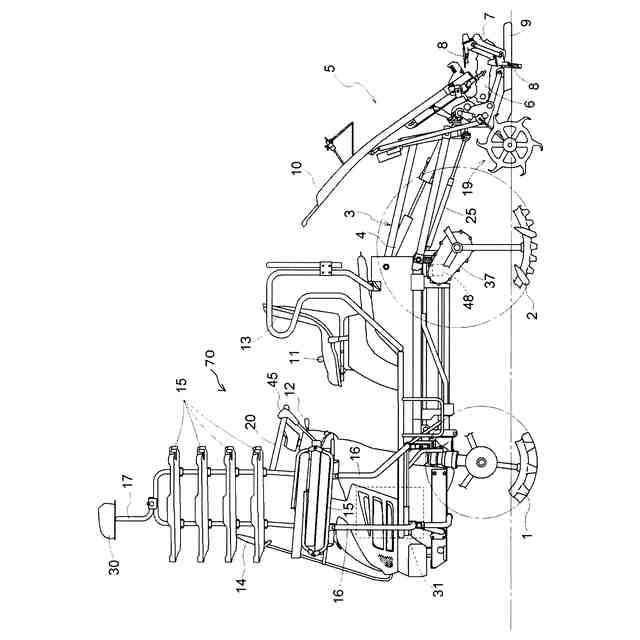
乗用型田植機の全体側面図である。
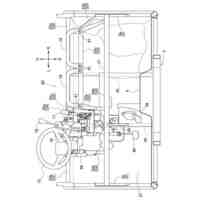
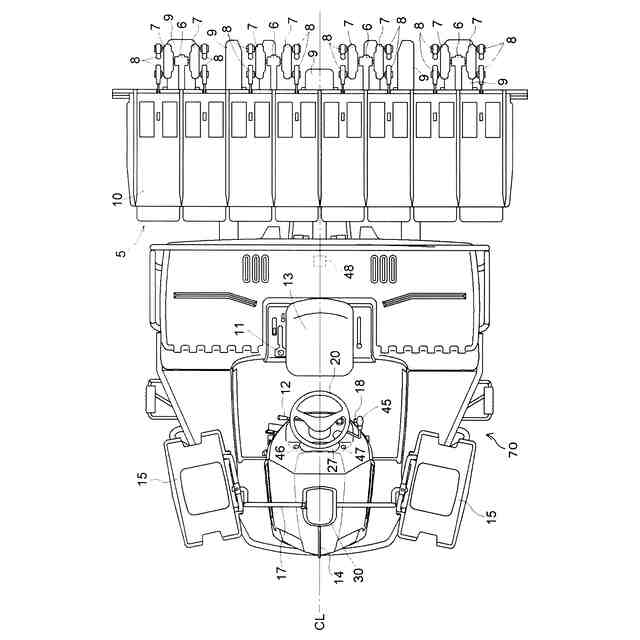
乗用型田植機の全体平面図である。
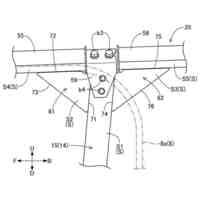
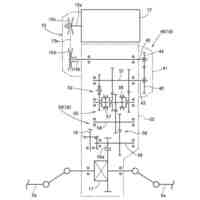
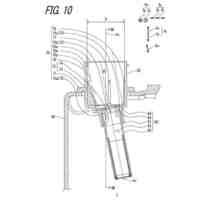
前輪の操向操作系、前輪及び後輪への伝動系を示す概略平面図である。
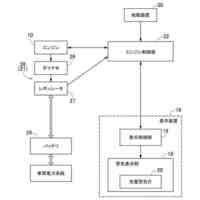
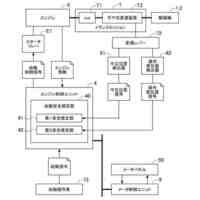
制御装置と各部との連係状態を示す図である。
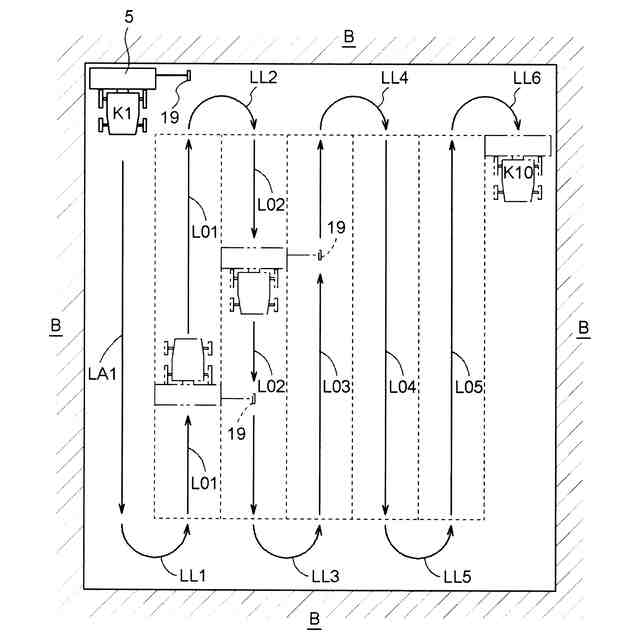
乗用型田植機の作業形態の概略を示す平面図である。
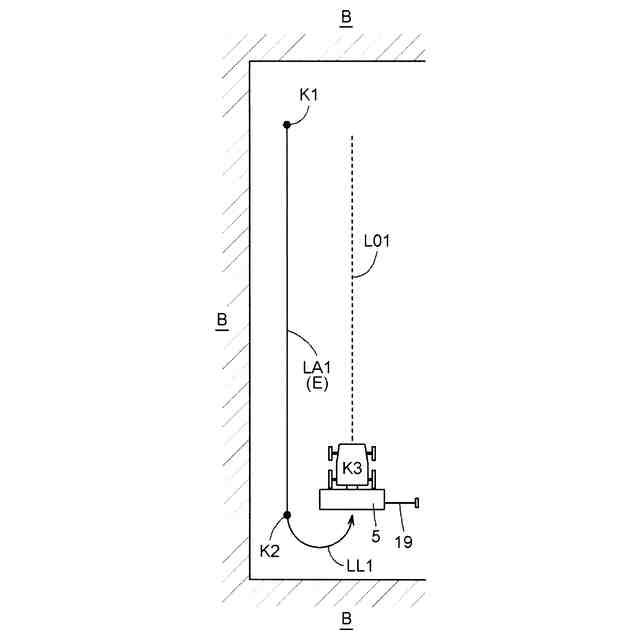
乗用型田植機の作業形態において、始点位置K1から終点位置K2の状態を示す平面図である。
乗用型田植機の作業形態において、始点位置K1から位置K3の状態を示す平面図である。
乗用型田植機の作業形態において、始点位置K1から位置K4の状態を示す平面図である。
乗用型田植機の作業形態において、始点位置K1から位置K5の状態を示す平面図である。
乗用型田植機の作業形態において、始点位置K1から位置K6の状態を示す平面図である。
乗用型田植機の作業形態において、始点位置K1から位置K7の状態を示す平面図である。
乗用型田植機の作業形態における制御の流れを示す図である。
乗用型田植機の作業形態における制御の流れを示す図である。
乗用型田植機の作業形態における制御の流れを示す図である。
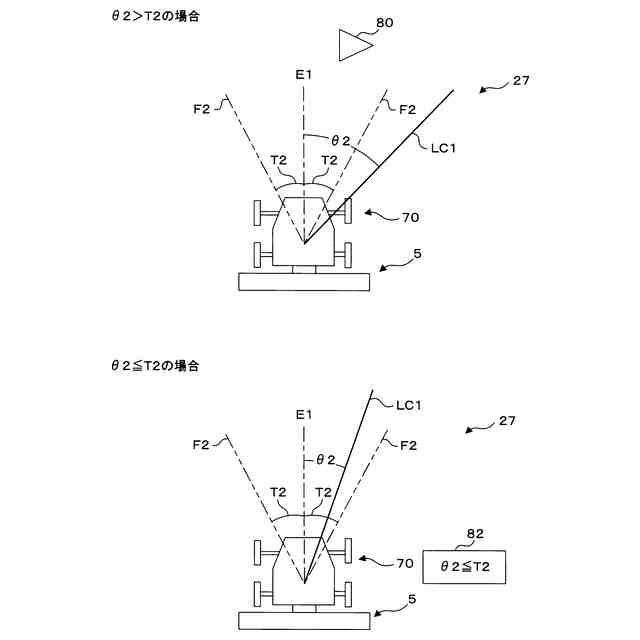
発明の実施の第3別形態において、機体の状態を示す概略平面図である。
第1自動走行制御を実行している場合に、表示パネルに表示される画像を示す模式図である。
第2自動走行制御を実行する乗用型田植機の作業形態において、始点位置K1から位置K3の状態を示す平面図である。
第2自動走行制御を実行する乗用型田植機の作業形態において、始点位置K1から位置K6の状態を示す平面図である。
第2自動走行制御を実行している場合に、表示パネルに表示される画像を示す模式図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社クボタ
作業車
1か月前
株式会社クボタ
作業車
23日前
株式会社クボタ
作業車
29日前
株式会社クボタ
作業車
29日前
株式会社クボタ
作業車
1か月前
株式会社クボタ
作業機
16日前
株式会社クボタ
作業車
1か月前
株式会社クボタ
作業車
1か月前
株式会社クボタ
移植機
1か月前
株式会社クボタ
移植機
1か月前
株式会社クボタ
作業車
1か月前
株式会社クボタ
作業車
10日前
株式会社クボタ
作業車
1か月前
株式会社クボタ
作業車
8日前
株式会社クボタ
作業車
8日前
株式会社クボタ
作業車
1か月前
株式会社クボタ
作業機
2日前
株式会社クボタ
作業車
24日前
株式会社クボタ
作業車両
1か月前
株式会社クボタ
作業車両
1か月前
株式会社クボタ
作業車両
1か月前
株式会社クボタ
作業車両
29日前
株式会社クボタ
作業車両
29日前
株式会社クボタ
作業車両
8日前
株式会社クボタ
作業車両
8日前
株式会社クボタ
作業車両
17日前
株式会社クボタ
ガスケット
1か月前
株式会社クボタ
豆類選別機
1か月前
株式会社クボタ
多目的車両
1か月前
株式会社クボタ
電動作業車
24日前
株式会社クボタ
多目的車両
1か月前
株式会社クボタ
多目的車両
15日前
株式会社クボタ
多目的車両
1か月前
株式会社クボタ
豆類選別機
1か月前
株式会社クボタ
豆類選別機
1か月前
株式会社クボタ
豆類選別機
1か月前
続きを見る
他の特許を見る





 特許ウォッチ
特許ウォッチ