TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025161633
公報種別
公開特許公報(A)
公開日
2025-10-24
出願番号
2024064990
出願日
2024-04-12
発明の名称
無人フォークリフトの初期設定方法および調整用パレット
出願人
三菱ロジスネクスト株式会社
代理人
弁理士法人志賀国際特許事務所
主分類
B66F
9/24 20060101AFI20251017BHJP(巻上装置;揚重装置;牽引装置)
要約
【課題】無人フォークリフトの導入を容易に行い、正式稼働前の試験走行に要する時間、及びコストを抑える。
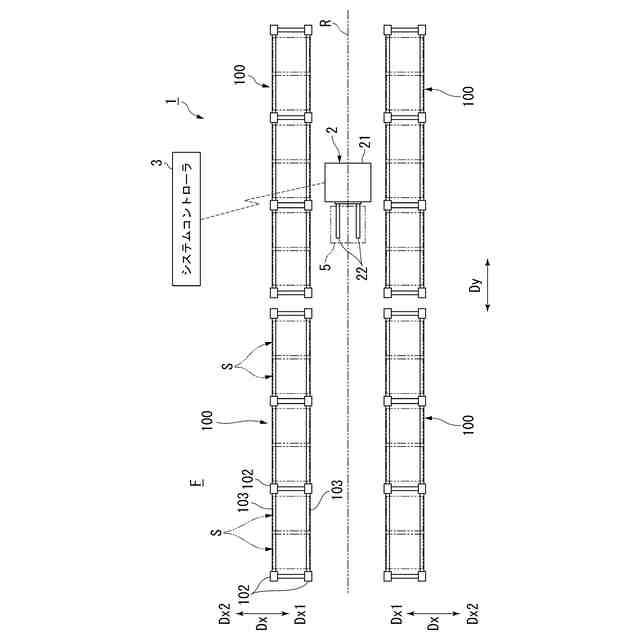
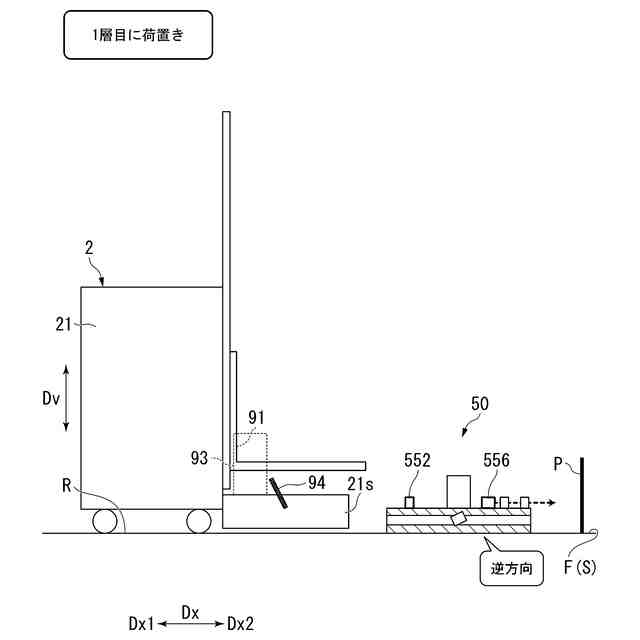
【解決手段】無人フォークリフトの初期設定方法は、予め設定された動作プログラムに基づいて、前記ラック構造物に前記調整用パレットを載置するステップと、前記調整用パレットと前記ラック構造物との相対位置情報を取得するステップと、前記相対位置情報に基づいて、前記ラック構造物に載置される前記調整用パレットの前記ラック構造物に対するずれ量を算出するステップと、を含み、前記ラック構造物の2層目以上の層に載置する場合には、前記無人フォークリフトのフォークで前記調整用パレットを前記順方向に支持して載置し、前記ラック構造物の1層目に載置する場合には、前記無人フォークリフトのフォークで前記調整用パレットを前記順方向とは逆向きの方向である逆方向に支持して載置する。
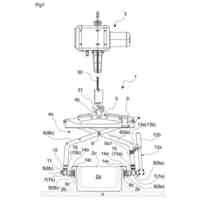
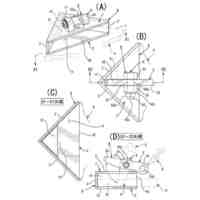
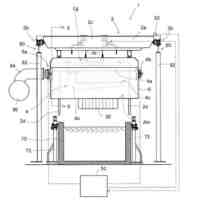
【選択図】図1
特許請求の範囲
【請求項1】
ラック構造物を備えた施設に無人フォークリフトを導入する際において、調整用パレットを用いて行う初期設定方法であって、
前記調整用パレットは、
前記無人フォークリフトのフォークで支持可能、かつラック構造物上に載置可能なパレット本体と、
前記パレット本体に設けられ、前記ラック構造物に載置された際の当該ラック構造物との相対位置情報を取得する位置情報取得部と、を備え、
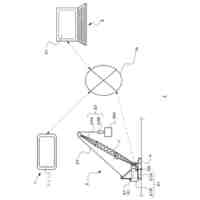
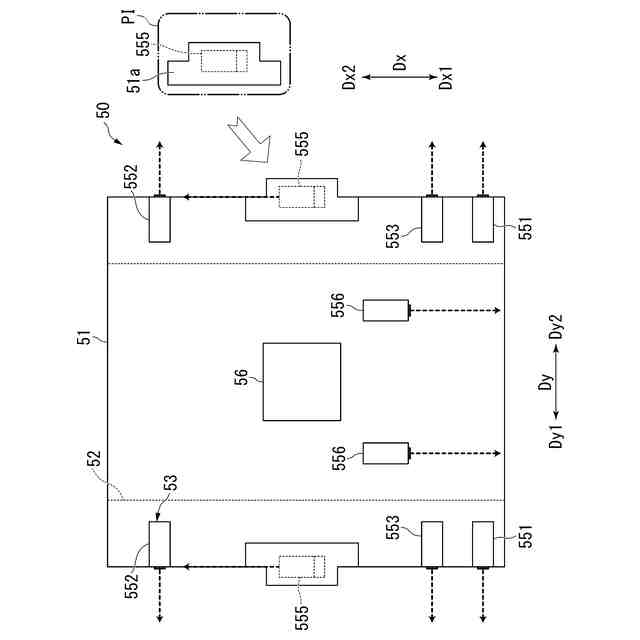
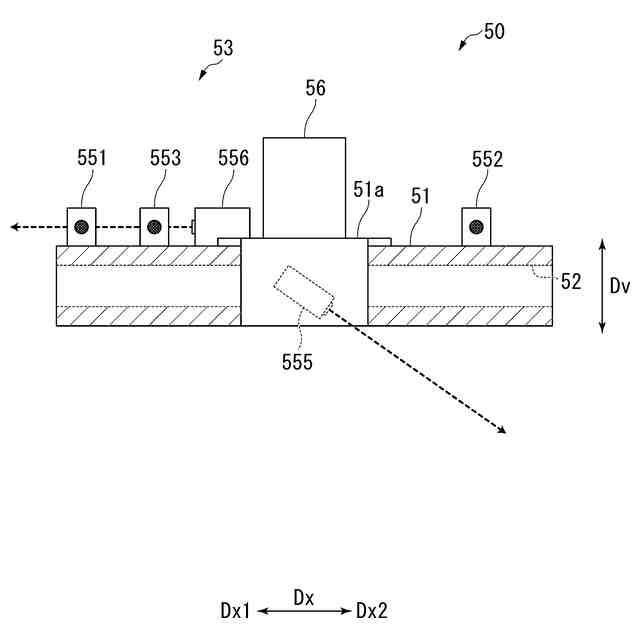
前記位置情報取得部は、
前記調整用パレットが前記無人フォークリフトのフォークに順方向に支持された場合において、
前記ラック構造物に対する前記無人フォークリフトの進退方向の後方側に配置され、水平面内で前記進退方向に交差する左右方向に向かってレーザを発する第一のレーザ変位計と、
前記進退方向の前方側に配置され、前記左右方向に向かってレーザを発する第二のレーザ変位計と、
前記進退方向の前方側の斜め下方に向かってレーザを発する第三のレーザ変位計と、
前記進退方向の後方側に向かってレーザを発する第四のレーザ変位計と、
を備えており、
前記初期設定方法は、
予め設定された動作プログラムに基づいて、前記無人フォークリフトにより、前記ラック構造物に前記調整用パレットを載置するステップと、
前記調整用パレットが備える前記位置情報取得部により、前記調整用パレットと前記ラック構造物との相対位置情報を取得するステップと、
前記相対位置情報に基づいて、前記ラック構造物に載置される前記調整用パレットの前記ラック構造物に対するずれ量を算出するステップと、
を含み、
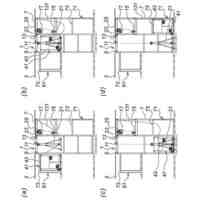
前記ラック構造物に前記調整用パレットを載置するステップにおいて、
前記ラック構造物の2層目以上の層に載置する場合には、前記無人フォークリフトのフォークで前記調整用パレットを前記順方向に支持して載置し、
前記ラック構造物の1層目に載置する場合には、前記無人フォークリフトのフォークで前記調整用パレットを前記順方向とは逆向きの方向である逆方向に支持して載置する、
無人フォークリフトの初期設定方法。
続きを表示(約 3,500 文字)
【請求項2】
前記調整用パレットと前記ラック構造物との相対位置情報を取得するステップにおいて、
前記ラック構造物の2層目以上の層に載置された場合には、
前記第三のレーザ変位計を通じて、前記調整用パレットの前記進退方向の前方側の下方に位置する後部ビーム材との距離を取得するステップと、
前記第一のレーザ変位計を通じて、前記調整用パレットの前記左右方向に位置する前部支柱との距離を取得するステップと、
を含み、
前記ラック構造物の1層目に載置された場合には、
前記第四のレーザ変位計を通じて、前記調整用パレットの前記進退方向の前方側に位置する、前記ラック構造物に設けられた反射板との距離を取得するステップと、
前記第二のレーザ変位計を通じて、前記調整用パレットの前記左右方向に位置する前部支柱との距離を取得するステップと、
を含む、
請求項1記載の無人フォークリフトの初期設定方法。
【請求項3】
前記調整用パレットの前記位置情報取得部は、さらに、前記無人フォークリフトのフォークに支持された際の当該無人フォークリフトとの相対位置情報を取得するものであり、
予め設定された動作プログラムに基づいて、前記調整用パレットを、前記無人フォークリフトで荷取りするステップと、
前記調整用パレットが備える前記位置情報取得部により、前記調整用パレットと前記無人フォークリフトとの相対位置情報を取得するステップと、
前記調整用パレットと前記無人フォークリフトとの相対位置情報に基づいて、前記無人フォークリフトに対する前記調整用パレットのずれ量を算出するステップと、
をさらに含む請求項1または請求項2に記載の無人フォークリフトの初期設定方法。
【請求項4】
前記調整用パレットと前記無人フォークリフトとの相対位置情報を取得するステップにおいて、
前記ラック構造物の2層目以上の層から荷取りした場合には、
前記第四のレーザ変位計を通じて、前記無人フォークリフトのフォークの前向面との距離を取得するステップと、
前記第一のレーザ変位計を通じて、前記無人フォークリフトに設けられた、横向面を有する反射部材との距離を取得するステップと、
を含み、
前記ラック構造物の1層目にから荷取りした場合には、
前記第三のレーザ変位計を通じて、前記無人フォークリフトの前記進退方向の後方側の下方に設けられ、上前向面を有する反射部材との距離を取得するステップと、
前記第二のレーザ変位計を通じて、前記横向面を有する反射部材との距離を取得するステップと、
を含む、
請求項3に記載の無人フォークリフトの初期設定方法。
【請求項5】
ラック構造物を備えた施設に無人フォークリフトを導入する際の初期設定方法に用いられる調整用パレットであって、
前記無人フォークリフトのフォークで支持可能、かつラック構造物上に載置可能なパレット本体と、
前記パレット本体に設置された付け替え用支持体と、
前記パレット本体に設けられ、前記ラック構造物に載置された際の当該ラック構造物との相対位置情報を取得する位置情報取得部と、
を備え、
前記位置情報取得部は、
前記調整用パレットが前記無人フォークリフトのフォークに、順方向に支持された場合において、
前記ラック構造物に対する前記無人フォークリフトの進退方向の後方側に配置され、水平面内で前記進退方向に交差する左右方向に向かってレーザを発する第一のレーザ変位計と、
前記進退方向の前方側に配置され、前記左右方向に向かってレーザを発する第二のレーザ変位計と、
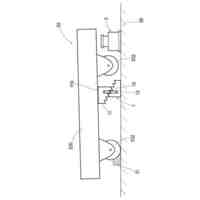
前記パレット本体の既定位置に設けられ、前記進退方向の前方側の斜め下方に向かってレーザを発する第三のレーザ変位計と、
前記進退方向の後方側に向かってレーザを発する第四のレーザ変位計と、
を備え、
前記付け替え用支持体は、前記既定位置から取り外された第三のレーザ変位計を、上下反転させて取り付け可能とされている付け替え位置を有している、
調整用パレット。
【請求項6】
ラック構造物を備えた施設に無人フォークリフトを導入する際において、請求項5に記載の調整用パレットを用いて行う初期設定方法であって、
予め設定された動作プログラムに基づいて、前記無人フォークリフトにより、前記ラック構造物に前記調整用パレットを載置するステップと、
前記調整用パレットが備える前記位置情報取得部により、前記調整用パレットと前記ラック構造物との相対位置情報を取得するステップと、
前記相対位置情報に基づいて、前記ラック構造物に載置される前記調整用パレットの前記ラック構造物に対するずれ量を算出するステップと、
を含み、
前記ラック構造物に前記調整用パレットを載置するステップにおいて、
前記ラック構造物の2層目以上の層に載置する場合には、前記第三のレーザ変位計を前記既定位置に設置して前記ラック構造物に載置し、
前記ラック構造物の1層目に載置する場合には、前記第三のレーザ変位計を前記付け替え位置に設置して前記ラック構造物に載置する、
無人フォークリフトの初期設定方法。
【請求項7】
ラック構造物を備えた施設に無人フォークリフトを導入する際の初期設定方法に用いられる調整用パレットであって、
前記無人フォークリフトのフォークで支持可能、かつラック構造物上に載置可能なパレット本体と、
前記パレット本体に設けられ、前記ラック構造物に載置された際の当該ラック構造物との相対位置情報を取得する位置情報取得部と、
を備え、
前記位置情報取得部は、
前記調整用パレットが前記無人フォークリフトのフォークに、順方向に支持された場合において、
前記ラック構造物に対する前記無人フォークリフトの進退方向の後方側に配置され、水平面内で前記進退方向に交差する左右方向に向かってレーザを発する第一のレーザ変位計と、
前記進退方向の前方側に配置され、前記左右方向に向かってレーザを発する第二のレーザ変位計と、
前記パレット本体の既定位置に設けられ、前記進退方向の前方側の斜め下方に向かってレーザを発する第三のレーザ変位計と、
前記進退方向の後方側に向かってレーザを発する第四のレーザ変位計と、
を備え、
前記パレット本体は、前記進退方向に沿って延在するスケール部材を備えている、
調整用パレット。
【請求項8】
ラック構造物を備えた施設に無人フォークリフトを導入する際において、請求項7に記載の調整用パレットを用いて行う初期設定方法であって、
予め設定された動作プログラムに基づいて、前記無人フォークリフトにより、前記ラック構造物に前記調整用パレットを載置するステップと、
前記調整用パレットが備える前記位置情報取得部により、前記調整用パレットと前記ラック構造物との相対位置情報を取得するステップと、
前記相対位置情報に基づいて、前記ラック構造物に載置される前記調整用パレットの前記ラック構造物に対するずれ量を算出するステップと、
を含み、
前記調整用パレットと前記ラック構造物との相対位置情報を取得するステップにおいて、
前記ラック構造物の2層目以上の層に載置された場合には、
前記第三のレーザ変位計を通じて、前記調整用パレットの前記進退方向の前方側の下方に位置する後部ビーム材との距離を取得するステップと、
前記第一のレーザ変位計を通じて、前記調整用パレットの前記左右方向に位置する前部支柱との距離を取得するステップと、
を含み、
前記ラック構造物の1層目に載置された場合には、
前記スケール部材を通じて、前記ラック構造物の基準位置に対する前記調整用パレットの前記進退方向の相対位置を取得するステップと、
前記第二のレーザ変位計を通じて、前記調整用パレットの前記左右方向に位置する前部支柱との距離を取得するステップと、
を含む、
無人フォークリフトの初期設定方法。
発明の詳細な説明
【技術分野】
【0001】
本開示は、無人フォークリフトの初期設定方法および調整用パレットに関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
特許文献1には、一対のフォ-クに、リ-チ方向パレットずれ検出装置と、左右方向パレットずれ検出装置とを設け、フォ-ク上のパレットの前後方向と左右方向のずれ及び回転ずれを検出可能にした無人フォ-クリフトの構成が開示されている。このような構成では、パレットをピックアップする場合、保持したパレットをラック等に降ろす場合、パレットを保持した状態で無人フォークリフトが走行している場合等に、フォークに対するパレットのずれを検出する。
【0003】
また、特許文献2には、ラック構造物を備えた施設に無人フォークリフトを導入する際の初期設定方法であって、予め設定された動作プログラムに基づいて、前記無人フォークリフトにより、前記ラック構造物のパレット載置部に調整用パレットを載置するステップと、前記調整用パレットが備える位置情報取得部により、前記調整用パレットと前記ラック構造物との相対位置情報を取得するステップと、前記相対位置情報に基づいて、前記ラック構造物に載置される前記調整用パレットの前記パレット載置部に対するずれ量を算出するステップと、を含む無人フォークリフトの初期設定方法が記載されている。
【0004】
無人フォークリフトは、予め設定された動作プログラムに基づいて、倉庫や工場等の施設内を走行し、所定の位置に設定されるパレット載置部に対し、パレットの荷取り動作、荷置き動作を実行する。無人フォークリフトを新たに施設に導入する場合、無人フォークリフトの移動経路、パレット載置部の位置座標等の初期設定情報を、動作プログラムに設定する必要がある。無人フォークリフトの移動経路、パレット載置部の位置座標等の情報は、施設や、施設内に設置されるラック等の設計データに基づいて取得される。
【0005】
しかしながら、例えば、施設内に設置されるラックは、ラック自体の組み付け精度、ラックの据え付け精度等に起因して、設計データに対して位置ずれが生じることがある。このため、無人フォークリフトの新規導入時には、無人フォークリフトの正式稼働に先立ち、予め設定された動作プログラムに基づいて、無人フォークリフトを作動させる試験走行が行われる。この試験走行では、無人フォークリフトで実際にパレットをラックのパレット載置部に荷置きする。荷置きされたパレットの実際の置き位置と、パレット載置部に対する位置ずれ量を作業員が計測し、計測した位置ずれ量に基づき、動作プログラム中のパレット載置部の位置座標等の情報を補正する必要がある。このため、荷置きされたパレットの位置ずれ量の計測に手間が掛かり、無人フォークリフトの導入に、時間、及びコストが掛かってしまう。
【0006】
特許文献2記載の発明は、上記課題を解決するためになされたものであって、無人フォークリフトの導入を容易に行い、正式稼働前の試験走行に要する時間、及びコストを抑えることができる無人フォークリフトの初期設定方法および調整用パレットを提供することを目的としている。
【先行技術文献】
【特許文献】
【0007】
特開平9-12297号公報
特開2023-67706号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
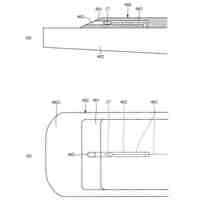
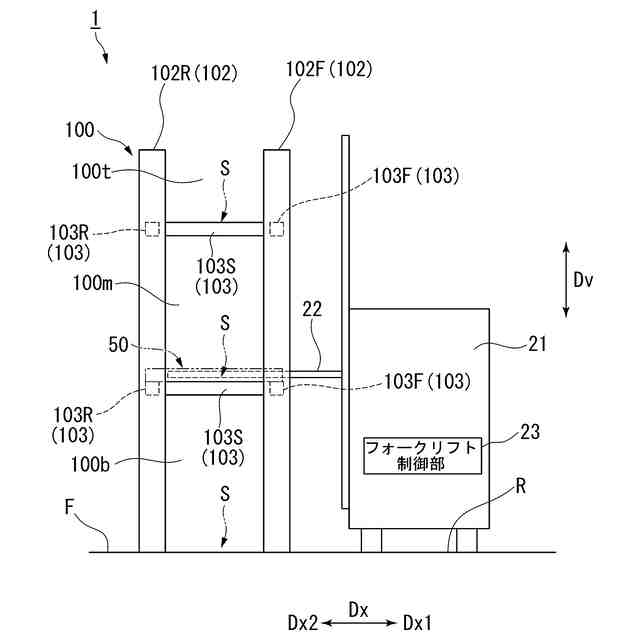
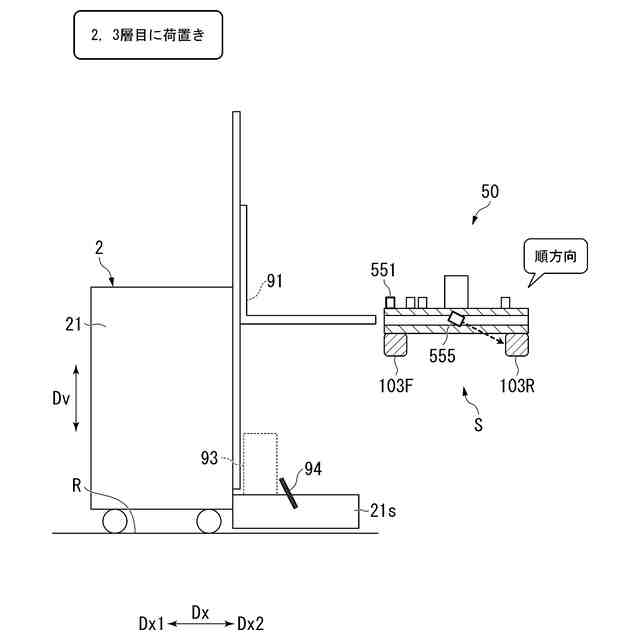
特許文献2記載の発明は、一例として、調整用パレットがラック構造物の2層目または3層目に載置された場合に、フォークリフトの進退方向(Dx)における前方側(Dx2側)斜め下方にレーザを発するレーザ変位計(第三のレーザ変位計555)を通じて、当該調整用パレットの一端を支持するビーム材(後部ビーム材103R)との距離を検出することで、ラック構造物に対する調整用パレットの相対位置情報を算出している。
【0009】
しかしながら、特許文献2記載の発明の態様では、調整用パレットをラック構造物の1層目(下層;床面)に載置する場合、斜め下方にレーザを発するレーザ変位計を用いてラック構造物との距離を取得することができない。そのため、1層目の相対位置情報を取得するためには、2層目、3層目とは別の手段で個別に計測するなどの対応が必要である。
【0010】
本開示は、上記課題を解決するためになされたものであって、2層目以上の層に載置される場合に加えて1層目に載置される場合の相対位置情報を容易に取得できる無人フォークリフトの初期設定方法および調整用パレットを提供することを目的とする。
【課題を解決するための手段】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
自走手摺
3か月前
個人
転落防止階段
2日前
ユニパルス株式会社
吊具
4か月前
個人
海上コンテナ昇降装置
10か月前
ユニパルス株式会社
吊具装置
11か月前
ユニパルス株式会社
荷役装置
9か月前
水戸工業株式会社
吊り具
6か月前
ユニパルス株式会社
リフト装置
5か月前
株式会社豊田自動織機
荷役車両
9か月前
株式会社豊田自動織機
荷役車両
10か月前
株式会社いうら
車椅子用昇降機
3か月前
株式会社豊田自動織機
産業車両
1か月前
株式会社豊田自動織機
産業車両
11か月前
ユニパルス株式会社
荷役助力装置
4か月前
ユニパルス株式会社
荷役助力装置
3か月前
大栄産業株式会社
クランプ
5か月前
株式会社大林組
安全支援システム
2か月前
株式会社伊藤
滑り止め装置
2か月前
岐阜工業株式会社
運搬台車
3日前
個人
垂直自動搬送機
1か月前
個人
エアバック式レスキュー用品
25日前
愛知製鋼株式会社
受け架台
2か月前
ユニパルス株式会社
荷役助力装置
6か月前
白山工業株式会社
バランサ
7か月前
株式会社ユピテル
システム等
6か月前
株式会社キトー
タイヤ用吊具
6か月前
株式会社豊田自動織機
フォークリフト
1か月前
フジテック株式会社
エレベータ
9か月前
新英運輸株式会社
自動車用台車
6か月前
大和ハウス工業株式会社
吊上具
2か月前
株式会社五十鈴製作所
搬送装置
5か月前
株式会社豊田自動織機
フォークリフト
8か月前
中国計量大学
電子安全クランプ
1か月前
有限会社サエキ
玉掛用器具
10か月前
中坪造園有限会社
吊り荷降ろし具
5か月前
フジテック株式会社
エスカレータ
6か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ