TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025155791
公報種別
公開特許公報(A)
公開日
2025-10-14
出願番号
2024225369
出願日
2024-12-20
発明の名称
ダイシング装置
出願人
株式会社東京精密
代理人
個人
,
個人
,
個人
主分類
B24B
49/02 20060101AFI20251002BHJP(研削;研磨)
要約
【課題】高精度のトリミング加工が可能なダイシング装置を提供する。
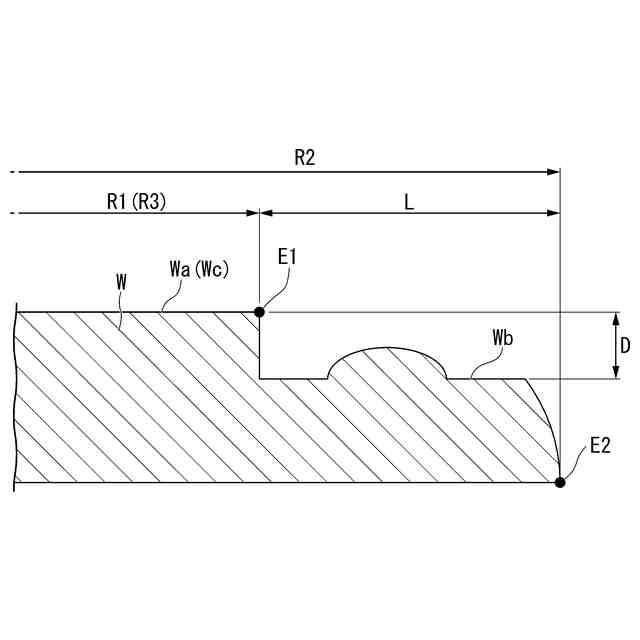
【解決手段】チャックテーブルと、回転テーブルと、変位センサと、ブレードと、スピンドルと、を含む切削部と、制御部と、を備える。制御部は、Z軸を中心とする周方向の位置における切削の基準となる位置情報を変位センサの測定結果に基づき全周に亘って取得し、取得した切削の基準となる位置情報に基づき、ワークの外周部に所定深さよりも浅い深さで下側に窪んだ段部をブレードに切削させた後に、周方向の位置における段部の法線方向の位置に関する段部位置情報を変位センサの測定結果に基づき全周に亘って取得し、段部位置情報と所定深さとの差分の切削量でブレードに段部を再切削させる。
【選択図】図5
特許請求の範囲
【請求項1】
ワークを保持面で保持してX方向に移動可能なチャックテーブルと、
前記チャックテーブルをZ軸の回りに回転させる回転テーブルと、
Y方向に移動可能であり、前記ワークに向けて照射した測定光の反射光を受光することで前記ワークの法線方向の位置を測定する変位センサと、
前記チャックテーブルに保持された前記ワークを切削するブレードと、前記ブレードを前記法線方向と直交する回転軸の回りに回転させるスピンドルと、を含む切削部と、
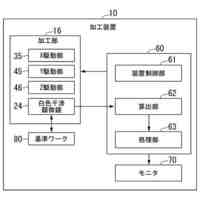
前記変位センサの測定結果に基づいて、前記チャックテーブル、前記回転テーブル、前記変位センサの移動を制御する制御部と、
を備え、
前記制御部は、
前記Z軸を中心とする周方向の位置における切削の基準となる位置情報を前記変位センサの測定結果に基づき全周に亘って取得し、
取得した切削の基準となる前記位置情報に基づき、前記ワークの外周部に所定深さよりも浅い深さで下側に窪んだ段部を前記ブレードに切削させた後に、前記周方向の位置における前記段部の前記法線方向の位置に関する段部位置情報を前記変位センサの測定結果に基づき全周に亘って取得し、
前記段部位置情報と前記所定深さとの差分の切削量で前記ブレードに前記段部を再切削させる、ダイシング装置。
続きを表示(約 1,300 文字)
【請求項2】
基準となる前記位置情報は、前記保持面の前記法線方向の位置に関するテーブル位置情報である、
請求項1に記載のダイシング装置。
【請求項3】
基準となる前記位置情報は、前記周方向の位置における前記チャックテーブルに保持された前記ワークの表面の前記法線方向の位置に関するワーク位置情報である、
請求項1に記載のダイシング装置。
【請求項4】
基準となる前記位置情報は、前記保持面の前記法線方向の位置に関するテーブル位置情報と、
前記周方向の位置における前記チャックテーブルに保持された前記ワークの表面の前記法線方向の位置に関するワーク位置情報である、
請求項1に記載のダイシング装置。
【請求項5】
前記制御部は、前記差分と前記ワークにおける前記Z軸の回りの方向とに応じて、前記ブレードを前記法線方向に移動させて再切削させる、
請求項1から4のいずれか一項に記載のダイシング装置。
【請求項6】
前記制御部は、前記ブレードに前記段部を再切削させる前に、前記変位センサの測定結果に基づいて、前記ワークの外径の第1中心と、前記段部の内径の第2中心との偏心量および偏心方向を取得し、前記偏心量および前記偏心方向に基づき前記第2中心を補正した位置に前記段部を再切削させる、
請求項5に記載のダイシング装置。
【請求項7】
前記制御部は、前記ワークの外周部に前記所定深さよりも浅い深さで下側に窪んだ前記段部を前記ブレードに切削させる際に、所定の径寸法よりも大きい前記内径で前記段部を形成させる、
請求項6に記載のダイシング装置。
【請求項8】
前記テーブル位置情報をF(θ)とし、
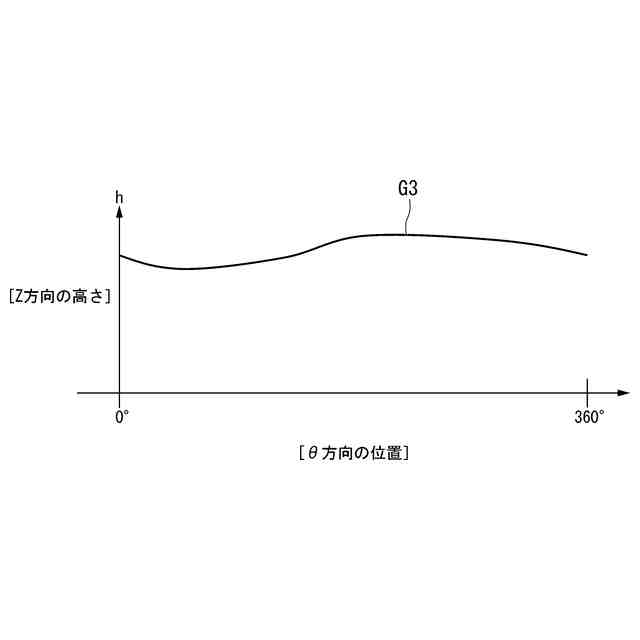
前記段部位置情報をg(θ)とし、
前記周方向の位置における前記保持面からの切り残し高さをfとし、
前記切り残し高さからの前記差分の切削量をf2とし、
再切削させる際の前記ブレードの前記法線方向の切削高さをhとすると、
h=2×F(θ)-g(θ)+2×f-f2
の関係を満足する、
請求項2に記載のダイシング装置。
【請求項9】
前記ワーク位置情報をf(θ)とし、
前記段部位置情報をg(θ)とし、
前記周方向の位置における前記所定深さよりも浅い切削深さをgとし、
前記差分の切削量をg2とし、
再切削させる際の前記ブレードの前記法線方向の切削高さをhとすると、
h=2×f(θ)-g(θ)-2×g-g2
の関係を満足する、
請求項3に記載のダイシング装置。
【請求項10】
前記ワークの前記外周部を1回目に切削する第1深さと、前記ワークの前記外周部を2回目に切削する第2深さとは、それぞれの切削時における前記ワークと前記ブレードとの前記Z軸に沿った方向の切削負荷に基づいて設定される、
請求項1から4のいずれか一項に記載のダイシング装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、ダイシング装置に関するものである。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
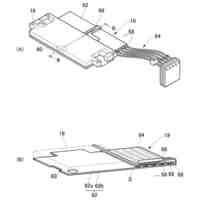
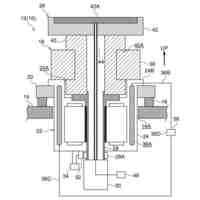
半導体素子や電子部品が形成されたウェーハ等のワークを個々のチップに分割するダイシング装置においては、スピンドルによって高速に回転されるブレードと、ワークを吸着保持するチャックテーブルと、チャックテーブルとブレードとの相対的位置を変化させるX、Y、Z、θ駆動部とを備えている。このダイシング装置では、各駆動部によりブレードとワークとを相対的に移動させながら、ブレードによってワークを切り込むことによりダイシング加工(切削加工)する。
【0003】
ウェーハ等のワークを極薄化する際には、外周部のR形状の影響でエッジチッピングが発生し、 そこを起点としたワークの割れが課題となっている。ワークの割れを防止するためには、エッジチッピングの要因となる外周部のR形状をブレードによって予め除去するトリミング加工が行われる。
【0004】
トリミング加工されたワークに対しては、顕微鏡を用いてエッジ部のXY平面における位置を3点以上測定し、測定した位置関係に基づいてトリミングの幅や、トリミング加工で形成された内側部分の中心位置、内径等を測定している。トリミング加工されたワークにおける表面のZ方向の位置を測定するために、特許文献1には、顕微鏡を用いてそのフォーカス位置から測定する方法、白色干渉顕微鏡を使って得られる段差プロファイルから測定する方法が開示されている。
【先行技術文献】
【特許文献】
【0005】
特開2021-125592号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、白色干渉顕微鏡は、視野が狭く、深さ方向に走査が必要なため測定に時間が掛かるという問題がある。
【0007】
また、ワークにおける表面の法線方向であるZ方向の位置を測定する際には、例えば、チャックテーブルを固定した状態で変位センサが移動して測定を行う。チャックテーブルは、回転成分におけるZ方向の位置変化を有する場合があるため、ワークにおける表面のZ方向の位置を測定する際に回転成分の誤差が含まれ高精度のトリミング加工できないという不都合が生じかねない。
【0008】
本発明は、以上のような点を考慮してなされたもので、高精度のトリミング加工が可能なダイシング装置を提供することを目的とする。
【課題を解決するための手段】
【0009】
本発明は下記の態様を有する。
ワークを保持面で保持してX方向に移動可能なチャックテーブルと、前記チャックテーブルをZ軸の回りに回転させる回転テーブルと、Y方向に移動可能であり、前記ワークに向けて照射した測定光の反射光を受光することで前記ワークの法線方向の位置を測定する変位センサと、前記チャックテーブルに保持された前記ワークを切削するブレードと、前記ブレードを前記法線方向と直交する回転軸の回りに回転させるスピンドルと、を含む切削部と、前記変位センサの測定結果に基づいて、前記チャックテーブル、前記回転テーブル、前記変位センサの移動を制御する制御部と、を備え、前記制御部は、前記Z軸を中心とする周方向の位置における切削の基準となる位置情報を前記変位センサの測定結果に基づき全周に亘って取得し、取得した切削の基準となる前記位置情報に基づき、前記ワークの外周部に所定深さよりも浅い深さで下側に窪んだ段部を前記ブレードに切削させた後に、前記周方向の位置における前記段部の前記法線方向の位置に関する段部位置情報を前記変位センサの測定結果に基づき全周に亘って取得し、前記段部位置情報と前記所定深さとの差分の切削量で前記ブレードに前記段部を再切削させる、ダイシング装置。
【発明の効果】
【0010】
本発明では、ワークの法線方向の位置を高精度に測定できるダイシング装置を提供することができる。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社東京精密
加工装置
2か月前
株式会社東京精密
プローバ
2か月前
株式会社東京精密
プローバ
1か月前
株式会社東京精密
プローバ
1か月前
株式会社東京精密
加工装置
1か月前
株式会社東京精密
加工方法
1か月前
株式会社東京精密
プローバ
1か月前
株式会社東京精密
研削装置
1か月前
株式会社東京精密
加工装置
1か月前
株式会社東京精密
加工装置
1か月前
株式会社東京精密
研削装置
1か月前
株式会社東京精密
加工装置
1か月前
株式会社東京精密
プローバ
1か月前
株式会社東京精密
搬送装置
1か月前
株式会社東京精密
亀裂測定器
1か月前
株式会社東京精密
亀裂測定器
1か月前
株式会社東京精密
電池検査装置
2か月前
株式会社東京精密
ダイシング装置
1か月前
株式会社東京精密
半導体製造装置
1か月前
株式会社東京精密
レーザ加工装置
1か月前
株式会社東京精密
レーザ加工装置
1か月前
株式会社東京精密
テープ貼付装置
1か月前
株式会社東京精密
レーザ加工装置
1か月前
株式会社東京精密
ダイシング装置
1か月前
株式会社東京精密
ハブレスブレード
1か月前
株式会社東京精密
加工装置及び加工方法
1か月前
株式会社東京精密
収容ボックスシステム
1か月前
株式会社東京精密
ウェーハの面取り装置
1か月前
株式会社東京精密
校正方法及び校正装置
1か月前
株式会社東京精密
ウェーハの面取り装置
1か月前
株式会社東京精密
ケーブルのガイド方法
1か月前
株式会社東京精密
吸着装置及び研削装置
1か月前
株式会社東京精密
CMP装置及び研磨方法
1か月前
株式会社東京精密
ウェーハセンシング装置
1か月前
株式会社東京精密
面取り装置及び面取り方法
1か月前
株式会社東京精密
加工方法、及び、加工装置
1か月前
続きを見る
他の特許を見る








 特許ウォッチ
特許ウォッチ