TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025148922
公報種別
公開特許公報(A)
公開日
2025-10-08
出願番号
2024049286
出願日
2024-03-26
発明の名称
ウェーハセンシング装置
出願人
株式会社東京精密
代理人
個人
,
個人
,
個人
主分類
H01L
21/67 20060101AFI20251001BHJP(基本的電気素子)
要約
【課題】ウェーハのロードに必要なアームの種類を選択して提案できるウェーハセンシング装置を提供する。
【解決手段】ウェーハセンシング装置1は、データ取得部2と、フィードバック部3と、データ蓄積部4と、提案部5と、を備える。データ取得部2は、ウェーハWを撮像して測定データを取得する。フィードバック部3は、ウェーハWをロードする際に、測定データに基づいてアームの挿入高さ及びアームの持ち上げ量を設定してフィードバックする。データ蓄積部4は、測定データ、アームによるロードの成功の是非、及びロードの際に用いるアームの種類をビッグデータとして蓄積する。提案部5は、ウェーハWのロードが失敗した場合に、ビッグデータに基づいてロードに適切なアームの種類を提案する。
【選択図】図1
特許請求の範囲
【請求項1】
カセット内に配列されたウェーハを撮像し、撮像データを用いてウェーハの測定データを取得するデータ取得部と、
前記カセット内から前記ウェーハを搬送ロボットのアームでロードする際に、前記測定データに基づいて前記アームの挿入高さ及び前記アームの持ち上げ量を設定して前記搬送ロボットにフィードバックするフィードバック部と、
前記測定データ、前記アームによる前記ロードの成功の是非、及び前記ロードの際に用いる前記アームの種類をビッグデータとして蓄積するデータ蓄積部と、
前記アームによる前記ウェーハの前記ロードが失敗した場合に、前記ビッグデータに基づいて前記ウェーハの前記ロードに適切な前記アームの種類を提案する提案部と、を備える、
ことを特徴とするウェーハセンシング装置。
続きを表示(約 770 文字)
【請求項2】
前記フィードバック部は、
前記カセットに配列された前記ウェーハにおいて一枚ごとに前記アームの挿入高さ及び前記アームの持ち上げ量を設定する、
ことを特徴とする請求項1に記載のウェーハセンシング装置。
【請求項3】
前記フィードバック部は、
前記ウェーハ間に適切な距離が存在せず、前記アームの挿入高さ及び前記アームの持ち上げ量を設定して前記搬送ロボットにフィードバックできない場合、前記アームの挿入高さ及び前記アームの持ち上げ量をフィードバックできるように前記ウェーハの入れ替えを提案する、
ことを特徴とする請求項1又は請求項2に記載のウェーハセンシング装置。
【請求項4】
カセット内に配列されたウェーハを撮像し、撮像データを用いてウェーハの形状、厚さを測定データとして取得するデータ取得部と、
前記カセット内から前記ウェーハを搬送ロボットのアームでロードする際に、前記測定データに基づいて前記アームの挿入高さ及び前記アームの持ち上げ量を設定して前記搬送ロボットにフィードバックするフィードバック部と、
前記測定データ、前記アームによる前記ロードの成功の是非、及び前記ロードの際に用いる前記アームの種類をビッグデータとして蓄積するデータ蓄積部と、
前記アームによる前記ウェーハの前記ロードが失敗した場合に、前記ビッグデータに基づいて前記ウェーハの前記ロードに適切な前記アームの種類を提案する提案部と、を備え、
前記フィードバック部は、
前記カセット内に配列されたウェーハを撮像するカメラでセンシングをおこなった際に、前記ウェーハに異常がある場合に異常を通知する、
ことを特徴とするウェーハセンシング装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、ウェーハセンシング装置に関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
シリコン等のウェーハは、例えば、カセット内に配置されて半導体製造装置に接続され、カセットと半導体製造装置との間で搬送ロボット等のアームにより受け渡される。以下、アームによるウェーハの受け渡しを「ロード」ということがある。ここで、ウェーハを搬送ロボットでロードする際に、ウェーハの配置状態をウェーハマッピング装置によるマッピング処理により確認している。
マッピング処理用の装置として、例えば、カセットを挟むように光源と受光素子とを配置し、光源からの光を受光素子で受光し、受光した受光強度によりウェーハの有無を判別するウェーハマッピング装置が知られている(例えば、特許文献1参照)。
【0003】
また、マッピング処理用の装置として、例えば、マッピングセンサを用いたウェーハマッピング情報とカメラを用いたウェーハの撮像データを比較し、ウェーハの有無や異常を検知するウェーハマッピング装置が知られている(例えば、特許文献2参照)。
【先行技術文献】
【特許文献】
【0004】
特開2020-198381号公報
特開2013-4927号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
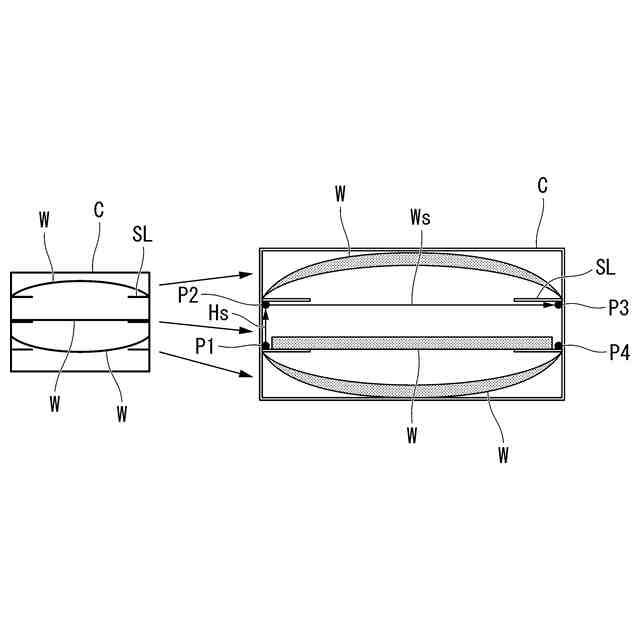
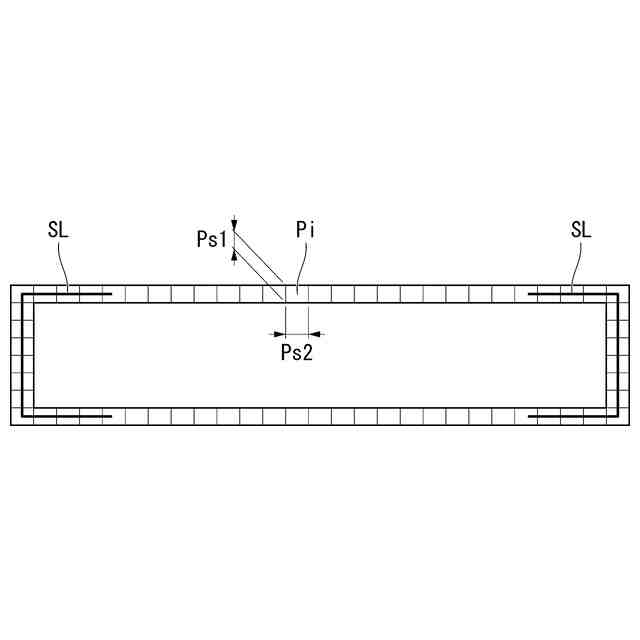
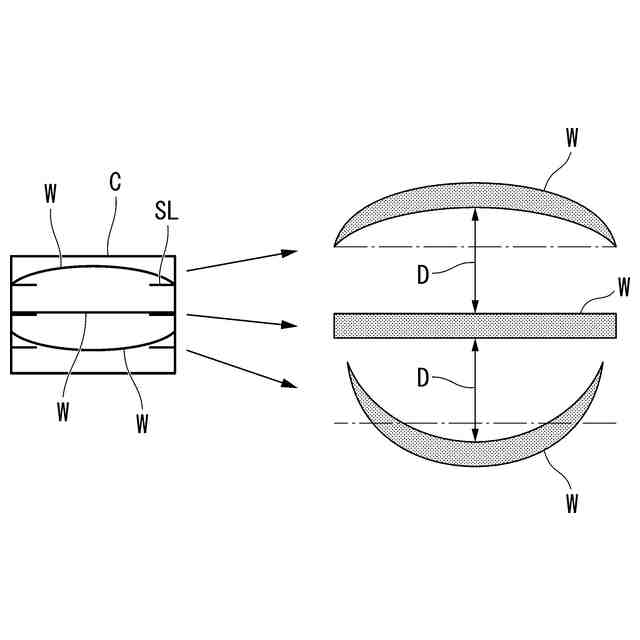
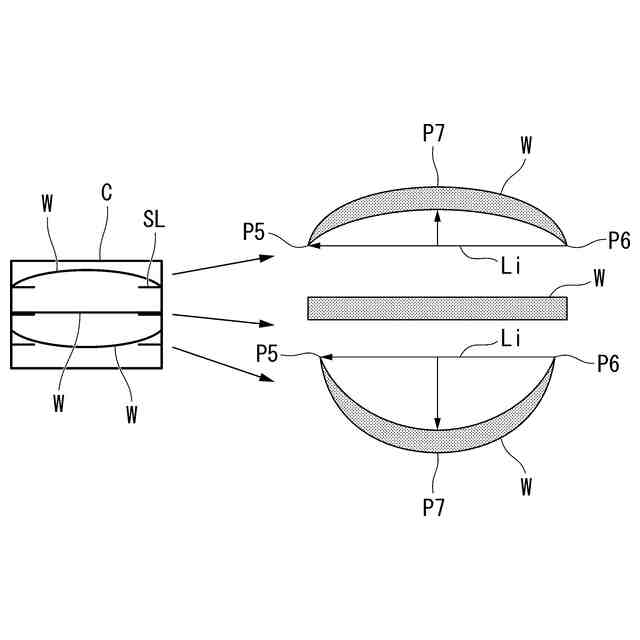
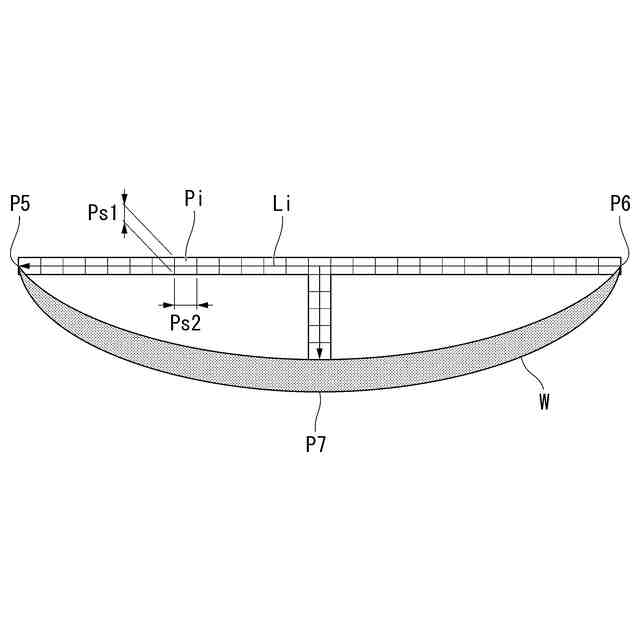
特許文献1のウェーハマッピング装置は、ウェーハで遮光している間を受光素子でウェーハ有と認識する。このため、例えば、ウェーハに反りや垂れがある場合、ウェーハ厚さや位置を正確に測定することは困難である。
また、特許文献2のウェーハマッピング装置は、例えば、ウェーハの反りや垂れを測定できた場合でも、ウェーハの撮像データを蓄積して、ウェーハのロードに必要なアームの種類を選択して提案することができない。このため、ウェーハの形状とアームの相性によりウェーハのロードが失敗する問題がある。
【0006】
本発明は、前述した事情に鑑みてなされたものであって、ウェーハのロードに必要なアームの種類を選択して提案できるウェーハセンシング装置を提供することを目的とする。
【課題を解決するための手段】
【0007】
前記課題を解決するために、本発明は以下の手段を提案している。
<1>本発明の一態様に係るウェーハセンシング装置は、カセット内に配列されたウェーハを撮像し、撮像データを用いてウェーハの測定データを取得するデータ取得部と、前記カセット内から前記ウェーハを搬送ロボットのアームでロードする際に、前記測定データに基づいて前記アームの挿入高さ及び前記アームの持ち上げ量を設定して前記搬送ロボットにフィードバックするフィードバック部と、前記測定データ、前記アームによる前記ロードの成功の是非、及び前記ロードの際に用いる前記アームの種類をビッグデータとして蓄積するデータ蓄積部と、前記アームによる前記ウェーハの前記ロードが失敗した場合に、前記ビッグデータに基づいて前記ウェーハの前記ロードに適切な前記アームの種類を提案する提案部と、を備えている。
【0008】
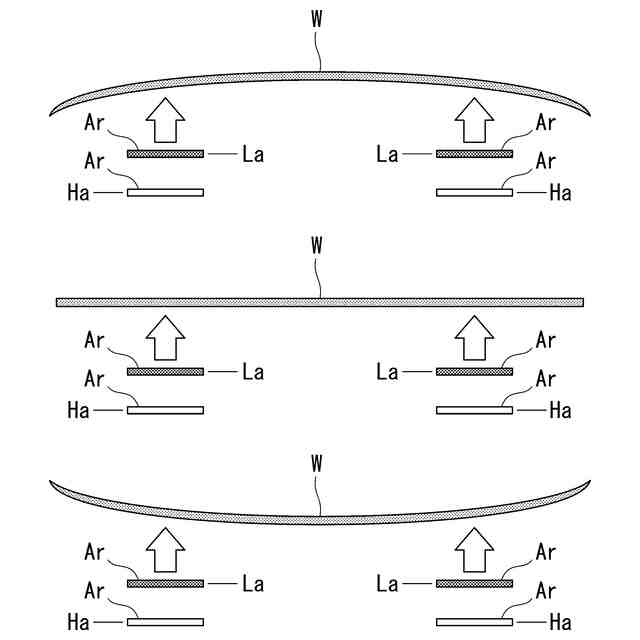
ウェーハセンシング装置によれば、カセット内に配列されたウェーハを撮像し、撮像データを用いてウェーハの形状、厚さを測定データとして取得する。測定データを取得した状態において、アームでロードする際に、測定データに基づいてアームの挿入高さ及びアームの持ち上げ量を設定する。設定したアームの挿入高さ及びアームの持ち上げ量を搬送ロボットにフィードバックして、設定したアームの挿入高さ及びアームの持ち上げ量に基づいてアームによるウェーハのロードを開始する。
測定データ、アームによるロードの成功の是非、及びロードの際に用いるアームの種類をビッグデータとして蓄積する。これにより、アームによるウェーハのロードが失敗した場合に、ビッグデータに基づいてウェーハのロードに適切なアームの種類を提案できる。
【0009】
<2>上記<1>に係るウェーハセンシング装置では、前記フィードバック部は、前記カセットに配列された前記ウェーハにおいて一枚ごとに前記アームの挿入高さ及び前記アームの持ち上げ量を設定してもよい。
【0010】
ウェーハセンシング装置によれば、アームの挿入高さ及びアームの持ち上げ量をウェーハの一枚ごとに設定する。これにより、全てのウェーハをアームでロードすることが可能である。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
他の特許を見る




 特許ウォッチ
特許ウォッチ