TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025145431
公報種別
公開特許公報(A)
公開日
2025-10-03
出願番号
2024045607
出願日
2024-03-21
発明の名称
校正方法及び校正装置
出願人
株式会社東京精密
代理人
個人
,
個人
,
個人
,
個人
主分類
G01B
5/008 20060101AFI20250926BHJP(測定;試験)
要約
【課題】プローブヘッドとスタイラス球との相対位置関係を簡単に求めることができる校正方法及び校正装置を提供する。
【解決手段】校正方法は、プローブヘッドのスタイラス球を校正球の表面に当接させた状態で、スタイラス球を校正球の表面の経路に沿って移動させる移動ステップと、移動ステップが行われている間、プローブヘッドに搭載されたカメラがターゲット群を撮影した画像に基づき、プローブヘッドの位置及び姿勢を検出する自己位置推定ステップと、自己位置推定ステップの検出結果に基づき、プローブヘッドとスタイラス球との相対位置関係を求める校正ステップと、を含む。
【選択図】図6
特許請求の範囲
【請求項1】
プローブヘッドのスタイラス球を校正球の表面に当接させた状態で、前記スタイラス球を前記校正球の表面の経路に沿って移動させる移動ステップと、
前記移動ステップが行われている間、前記プローブヘッドに搭載されたカメラがターゲット群を撮影した画像に基づき、前記プローブヘッドの位置及び姿勢を検出する自己位置推定ステップと、
前記自己位置推定ステップの検出結果に基づき、前記プローブヘッドと前記スタイラス球との相対位置関係を求める校正ステップと、
を含む校正方法。
続きを表示(約 440 文字)
【請求項2】
前記経路は、前記校正球の表面に沿った立体的な経路である、
請求項1に記載の校正方法。
【請求項3】
前記校正ステップは、前記相対位置関係とともに前記スタイラス球の半径を求める、
請求項2に記載の校正方法。
【請求項4】
前記経路は、前記校正球の表面に沿った平面的な経路である、
請求項1に記載の校正方法。
【請求項5】
プローブヘッドに搭載されたカメラがターゲット群を撮影した画像を取得する画像取得部と、
前記画像に基づき、前記プローブヘッドの位置及び姿勢を検出する自己位置推定部と、
前記プローブヘッドのスタイラス球を校正球の表面の経路に沿って移動させる倣い測定が行われている間に前記自己位置推定部による前記プローブヘッドの位置及び姿勢の検出が行われた結果に基づいて、前記プローブヘッドと前記スタイラス球との相対位置関係を求める校正処理部と、
を備える校正装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、プローブヘッドの校正方法及び校正装置に関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
従来より、ポータブル型の三次元座標測定機(CMM:Coordinate Measuring Machine)をロボットに持たせて、大物ワークの測定を自動で行うことが行われている。数十μm程度の精度要求に対しては、ポータブル型の三次元座標測定機にて要求を満足しつつあるが、十μm以下の高精度要求においてはブリッジ型の三次元座標測定機で対応しているのが現状である。
【0003】
また、数十μm程度の精度を実現するための技術として、レーザトラッカやマーカを利用した測定方法が知られている(例えば、特許文献1参照)。これらは、ベースステーションに仰角と方位角の首振り機能を備えており、さらに距離センサ又はカメラを備えて測定ヘッドの距離や姿勢を計算する。この測定方法によれば、首振り機構の可動範囲や距離センサの測長範囲が長いため、広範囲での測定が可能となる。
【0004】
しかしながら、レーザトラッカやマーカなどを利用した測定方法では、主に首振り機構の角度精度の限界により、ベースステーションと測定ヘッドの距離が大きくなるに従い測定精度が悪化する傾向になる。
【0005】
一方、三次元空間上の位置が既知のターゲットをカメラで撮影した画像からカメラの自己位置(位置及び姿勢)を検出する方法が知られている(例えば、特許文献2参照)。この方法によれば、各ターゲットの三次元空間上の位置と、撮影された画像上の各ターゲットの位置とを関連付けて計算を行うことにより、比較的単純な機構で高精度(5μm以下)を得やすいメリットがある。
【先行技術文献】
【特許文献】
【0006】
特開2020-148515号公報
特開2022-30807号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
ところで、三次元座標測定機用のプローブヘッド(測定ヘッド)にはスタイラスが接続されており、スタイラスの先端にはスタイラス球(測定子)が設けられている。ワークの三次元座標を測定する場合には、ワークに対してプローブヘッドを移動させることによりスタイラス球をワークに接触させる。このとき、ワークに接触したスタイラス球の位置を示す座標(スタイラス座標)が測定され、その測定結果に基づきワークの三次元座標が算出される。
【0008】
このようなプローブヘッドにカメラを搭載し、そのカメラを用いてターゲットを撮影することで、その画像からプローブヘッドの自己位置(位置及び姿勢)を検出することができる。
【0009】
しかしながら、ワークの三次元座標を測定するためには、プローブヘッドの自己位置だけでなく、プローブヘッド座標系におけるスタイラス球の位置(すなわち、プローブヘッドとスタイラス球との相対位置関係)を求めておくことが必要となる。
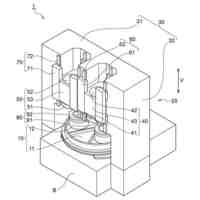
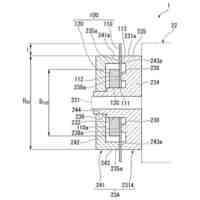
【0010】
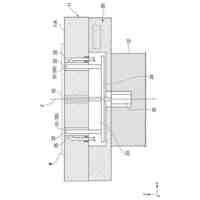
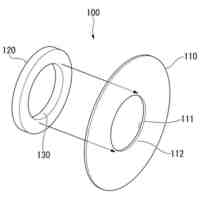
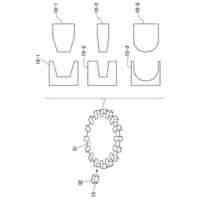
プローブヘッド座標系におけるスタイラス球の位置を求める方法として、例えば図7に示すような治具110を用いる方法がある。この治具110は円柱状に構成されており、その上面側には円錐状の凹部112が設けられる。そして、その凹部112の底部には、球状溝部114が設けられている。この方法では、プローブヘッド100におけるスタイラス102の先端に設けられたスタイラス球104を球状溝部114に配置した状態で、プローブヘッド100を様々な倒れ角で歳差運動させる。このとき、プローブヘッド100の姿勢に関係なくスタイラス球104の中心点は一定位置に固定された状態となる。このような関係を利用することで、プローブヘッド座標系におけるスタイラス球104の位置を求めることができる。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社東京精密
プローバ
1か月前
株式会社東京精密
研削装置
1か月前
株式会社東京精密
プローバ
1か月前
株式会社東京精密
加工装置
1か月前
株式会社東京精密
加工装置
1か月前
株式会社東京精密
プローバ
1か月前
株式会社東京精密
加工方法
1か月前
株式会社東京精密
搬送装置
1か月前
株式会社東京精密
プローバ
1か月前
株式会社東京精密
プローバ
1か月前
株式会社東京精密
加工装置
2か月前
株式会社東京精密
加工装置
1か月前
株式会社東京精密
加工装置
2か月前
株式会社東京精密
プローバ
2か月前
株式会社東京精密
加工装置
1か月前
株式会社東京精密
研削装置
1か月前
株式会社東京精密
亀裂測定器
1か月前
株式会社東京精密
亀裂測定器
1か月前
株式会社東京精密
電池検査装置
1か月前
株式会社東京精密
レーザ加工装置
1か月前
株式会社東京精密
半導体製造装置
1か月前
株式会社東京精密
ダイシング装置
1か月前
株式会社東京精密
ダイシング装置
1か月前
株式会社東京精密
テープ貼付装置
1か月前
株式会社東京精密
レーザ加工装置
1か月前
株式会社東京精密
レーザ加工装置
1か月前
株式会社東京精密
ハブレスブレード
1か月前
株式会社東京精密
スラリー供給装置
2か月前
株式会社東京精密
校正方法及び校正装置
1か月前
株式会社東京精密
ケーブルのガイド方法
1か月前
株式会社東京精密
ウェーハの面取り装置
1か月前
株式会社東京精密
ウェーハの面取り装置
1か月前
株式会社東京精密
吸着装置及び研削装置
1か月前
株式会社東京精密
収容ボックスシステム
1か月前
株式会社東京精密
加工装置及び加工方法
1か月前
株式会社東京精密
ウェーハセンシング装置
1か月前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ