TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025154721
公報種別
公開特許公報(A)
公開日
2025-10-10
出願番号
2024057882
出願日
2024-03-29
発明の名称
センサシステム、センシング方法およびプログラム
出願人
古河電気工業株式会社
,
古河AS株式会社
代理人
個人
,
個人
主分類
G01S
13/86 20060101AFI20251002BHJP(測定;試験)
要約
【課題】車両の周辺環境の変化に適用可能なセンサシステム、センシング方法及びプログラムを提供すること。
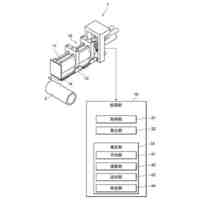
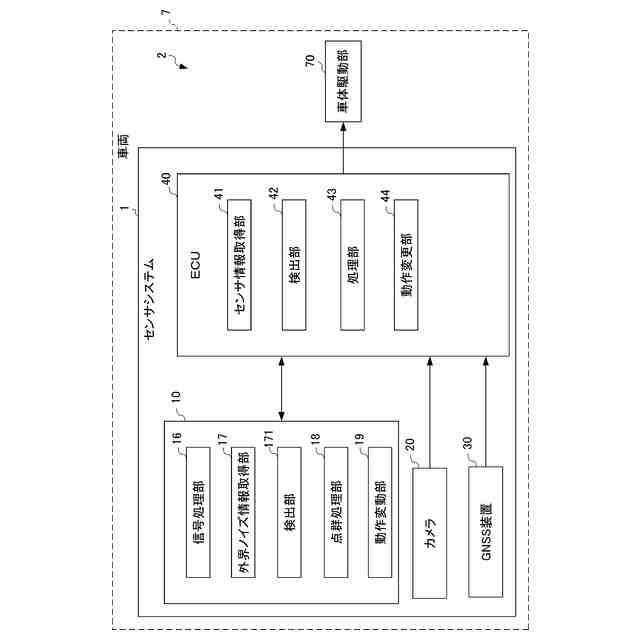
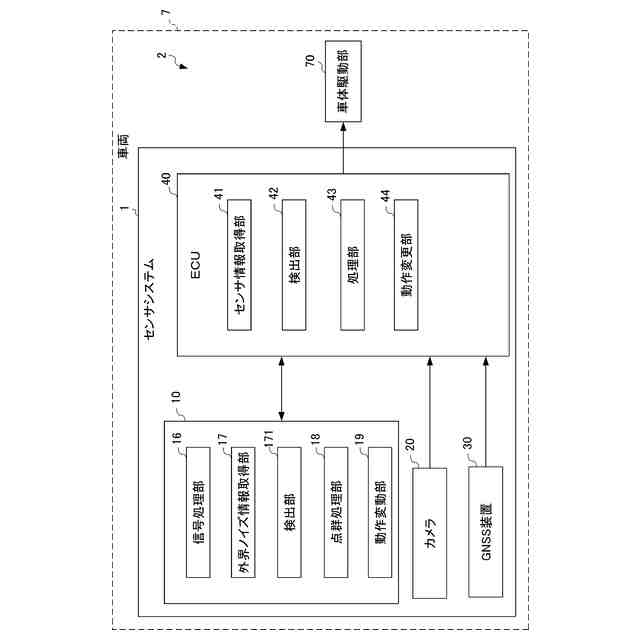
【解決手段】センサシステム1は、車両7に搭載され、少なくともレーダ10及びカメラ20を備えるセンサシステム1であって、レーダ10によって検出されたレーダ情報とカメラ20によって検出された光学センサ情報との少なくともいずれかに基づいて、車両7の周囲に存在する物体を検出する検出部42、171と、車両7の周囲の外界情報に基づいて、車両7の動作モードを変更する動作変更部19、44と、を備える。
【選択図】図3C
特許請求の範囲
【請求項1】
車両に搭載され、少なくともレーダ及び光学センサを備えるセンサシステムであって、
前記レーダによって検出されたレーダ情報と前記光学センサによって検出された光学センサ情報との少なくともいずれかに基づいて、車両の周囲に存在する物体を検出する検出部と、
前記車両の周囲の外界情報に基づいて、車両の動作モードを変更する動作変更部と、を備えるセンサシステム。
続きを表示(約 1,000 文字)
【請求項2】
前記外界情報は、前記光学センサからの可視光波長の光及び赤外波長の光の少なくともいずれかにより検出される請求項1に記載のセンサシステム。
【請求項3】
前記動作変更部は、前記外界情報に基づいて、前記車両の動作モードの変更とともに前記レーダの動作モードの変更を併せて行う請求項1に記載のセンサシステム。
【請求項4】
前記レーダの動作モードの変更は、前記レーダ情報に含まれる信号において対象物とノイズとを区別するための閾値を変更することである請求項3に記載のセンサシステム。
【請求項5】
前記動作変更部は、距離の方向におけるCFAR処理により、前記レーダの通常の動作モードよりも前記閾値を相対的に高く設定することで前記レーダの動作モードを変更する請求項4に記載のセンサシステム。
【請求項6】
前記動作変更部は、前記レーダの通常の動作モード時に距離の方向におけるCFAR処理により前記閾値を設定している場合、前記距離の方向におけるCFAR処理において前記レーダの通常の動作モードよりも前記閾値を相対的に高く設定することで前記レーダの動作モードを変更する請求項4に記載のセンサシステム。
【請求項7】
前記動作変更部は、距離の方向において、通常の動作モードよりも車両の近傍において相対的に高くなるような異なる勾配又は変化を有する前記閾値を設定することで前記レーダの動作モードを変更する請求項4に記載のセンサシステム。
【請求項8】
前記動作変更部は、距離の方向において、通常の動作モードよりも相対的に高くなる前記閾値を、外界情報が前記レーダ又は前記光学センサに対して不適であると判定されたときに、過去の環境ノイズの履歴情報に基づいて設定する請求項4に記載のセンサシステム。
【請求項9】
前記動作変更部は、速度の方向におけるCFAR処理により、距離方向における車両の近傍側において相対的に高くなる閾値を設定することで前記レーダの動作モードを変更する請求項4に記載のセンサシステム。
【請求項10】
前記レーダは、それぞれ複数のチャンネルを有する送信アンテナ及び受信アンテナを有し、水平角方向及び仰俯角方向の両方に角度検出が可能であり、
前記センサシステムは、前記レーダ情報を用いて周辺環境の地図の作成と自己位置推定を同時に行う処理部を更に備える請求項3に記載のセンサシステム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、センサシステム、センシング方法およびプログラムに関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
近年、道路や道路以外の作業場などを走行するモビリティにおいて、安全運転支援、自動運転化の重要性が高まっている。例えば、一般道、交差点、高速道路、運搬を行う特殊車両、工事や工場内の運搬のための作業車、農場による農業機械など様々なモビリティの高度化が進んでいる。これらモビリティにはセンサシステムが搭載され、それらで認知された情報をもとに判断し、モビリティを制御することとなるが、これらはあらゆる外界状況でも実現する必要があり、これらに対して様々な形態や手法が検討されている。
【0003】
例えば、特許文献1には、センサフュージョンの例として、カメラとレーダの組み合わせによる物体検出方法が記載されている。特許文献1には、各々のセンサの信頼度を算出し、検出結果に重みを付け統合化した物標検出や、状況によってセンサ出力情報のうち近接側に検出した情報の使用など、より車両側が安全となるよう、複数センサの検出結果を適用する事例が示されている。
【0004】
特許文献2には、天候変化や悪天を画像識別により検知する技術が記載されている。特許文献2では、カメラでのランドマーク認識能力の低下、検知距離の低下等の判断、降雨など周辺の状況の判断を行い、降雨、霧、雪、砂嵐等、カメラによって悪環境の種別判定も可能としている。
【0005】
特許文献3には、レーダの閾値処理として、CFARによる検出手法と、ノイズ信号をもとに所定の閾値を設定する手法が記載されている。CFARのみでは、強いターゲット周辺の弱いターゲットが検出されず、長さをもったターゲットが未検出となる。さらにノイズが検出されるなどいくつか課題があるため、固定的なしきい値設定を導入する例が示されている。
【0006】
特許文献4には、天候変化への車両の対応として、降雨センサ等で検出した雨天情報をもとに、自動運転車両における検索やナビゲーションのモードを変更する例が記載されている。この例では、雨天検出時、屋根付き駐車場を優先的にナビゲートする。
【先行技術文献】
【特許文献】
【0007】
特開2014-6123号公報
特開2022-14729号公報
特開2022-174938号公報
特開2018-105814号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
しかしながら、特許文献1では、複数のセンサを利用することで、車両が衝突防止等に対してより安全となる側のセンサフュージョンが実施されるものの、天候等の周辺環境の動的な変化への対応については記載されていない。また、特許文献2では、カメラ、画像識別の手段により、天候変化や悪天等などセンサに不適な条件を検知できるものの、その条件において車両上やセンサ上での具体的な対策等は記載されていない。また、特許文献3には、レーダにて周辺の対象物の検出をより良く行う方法として、閾値処理手法が開示されているものの、悪天において好適な手法、また周辺環境の動的な変化に対応する手法は記載されていない。特許文献4には、天候等の周辺環境の動的な変化に応じた、特定のアプリケーションにおける情報提供のモードが変更される手法が開示されているものの、これら実施には車両外部との通信を前提とし必要としており、車両に搭載されたセンサ等による車両単独での判断、またセンサ動作モード変更など、自律的な手法は記載されていない。
【0009】
本発明は、車両の周辺環境の変化に適用可能なセンサシステムを提供することを目的とする。
【課題を解決するための手段】
【0010】
(1)センサシステムは、車両に搭載され、少なくともレーダ及び光学センサを備えるセンサシステムであって、前記レーダによって検出されたレーダ情報と前記光学センサによって検出された光学センサ情報との少なくともいずれかに基づいて、車両の周囲に存在する物体を検出する検出部と、前記車両の周囲の外界情報に基づいて、車両の動作モードを変更する動作変更部と、を備える。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
日本精機株式会社
検出装置
1か月前
個人
採尿及び採便具
1か月前
個人
計量機能付き容器
25日前
個人
アクセサリー型テスター
1か月前
個人
高精度同時多点測定装置
1か月前
株式会社カクマル
境界杭
15日前
株式会社ミツトヨ
測定器
1か月前
日本精機株式会社
発光表示装置
8日前
甲神電機株式会社
電流検出装置
1か月前
株式会社トプコン
測量装置
7日前
アズビル株式会社
電磁流量計
1か月前
大成建設株式会社
風洞実験装置
25日前
大和製衡株式会社
組合せ計量装置
1か月前
日本特殊陶業株式会社
ガスセンサ
7日前
双庸電子株式会社
誤配線検査装置
1か月前
大和製衡株式会社
組合せ計量装置
1か月前
愛知電機株式会社
軸部材の外観検査装置
1か月前
個人
計量具及び計量機能付き容器
25日前
個人
非接触による電磁パルスの測定方法
28日前
日本特殊陶業株式会社
ガスセンサ
1日前
ローム株式会社
半導体装置
1か月前
日本信号株式会社
距離画像センサ
28日前
日本特殊陶業株式会社
ガスセンサ
23日前
個人
システム、装置及び実験方法
1か月前
愛知時計電機株式会社
ガスメータ
1か月前
ローム株式会社
半導体装置
1か月前
個人
液位検視及び品質監視システム
23日前
日本特殊陶業株式会社
センサ
1か月前
株式会社デンソー
電流センサ
1か月前
本陣水越株式会社
車載式計測標的物
2日前
トヨタ自動車株式会社
測定システム
1か月前
株式会社不二越
X線測定装置
28日前
日本特殊陶業株式会社
センサ
9日前
キーコム株式会社
画像作成システム
15日前
株式会社タイガーカワシマ
揚穀装置
7日前
日東精工株式会社
振動波形検査装置
1か月前
続きを見る
他の特許を見る






 特許ウォッチ
特許ウォッチ