TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025151620
公報種別
公開特許公報(A)
公開日
2025-10-09
出願番号
2024053141
出願日
2024-03-28
発明の名称
ロボットの制御方法
出願人
株式会社ライズ電子
,
シー・ケィ・ケー株式会社
代理人
個人
主分類
B25J
9/10 20060101AFI20251002BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】生産ラインや加工システム等における単位時間あたりの加工効率の低下を抑制し得るロボットの制御方法を提供する。
【解決手段】ワーク出し処理(S103)では、パレットに載置された加工前のワークに対しそのワーク軸とアクチュエータが回動可能な第6軸とが直交するようにワークの中間部をアクチュエータで把持した後、当該ワークを加工空間内に移動させて加工空間内の所定位置に位置させる。ワーク回転処理(S107)では、所定位置に位置するワークを把持したアクチュエータが第6軸で回転することなく手首と一緒にワーク軸を中心に旋回するように、手首、第2アーム、第1アームおよびボディを制御する。ワーク戻し処理(S111)では、ワーク回転処理(S107)で提供される期間内に加工された加工後のワークを別のパレットに移動させて載置する。
【選択図】図6
特許請求の範囲
【請求項1】
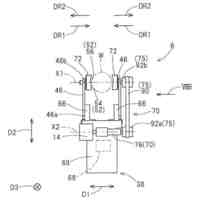
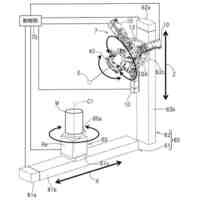
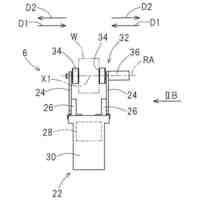
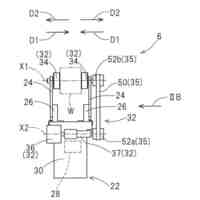
設置面に設置される基部と、前記設置面に垂直な第1軸を中心に回動可能に前記基部に支持される胴部と、前記第1軸に直交する第2軸を中心に揺動可能に基端側が前記胴部に支持される第1腕部と、前記第2軸に平行な第3軸を中心に揺動可能に基端側が前記第1腕部の先端側に支持されると共に前記第3軸に直交する第4軸を中心に先端側が回動可能な第2腕部と、前記第2腕部に対しオフセットして配置され前記第4軸に直交する第5軸を中心に揺動可能に基端側が前記第2腕部に支持される手首部と、前記第5軸に直交する第6軸を中心に回動可能に前記手首部の先端に設けられる把持部と、を少なくとも備えている垂直多関節型のロボットの制御方法であって、
パレットに載置された加工前の棒状のワークに対しそのワーク軸と前記第6軸とが直交するように前記ワークの中間部を前記把持部で把持した後、当該ワークを加工空間内に移動させて前記加工空間内の所定位置に位置させる第1ステップと、
前記所定位置に位置する前記ワークを把持した前記把持部が前記第6軸で回転することなく前記手首部と一緒に前記ワーク軸を中心に旋回するように、前記手首部を前記第5軸で揺動させ、前記第2腕部を前記第4軸で所定方向に回転させると共に前記第3軸で揺動させ、前記第1腕部を前記第2軸で揺動させ、前記胴部を前記第1軸で回動させて、前記所定位置において前記ワーク軸で回転する前記ワークに対して所定の加工を可能にする期間を提供する第2ステップと、
前記所定位置において前記把持部に把持されている加工後の前記ワークを前記パレットまたは別のパレットに移動させて載置する第3ステップと、
を含む、ことを特徴とするロボットの制御方法。
続きを表示(約 480 文字)
【請求項2】
前記第1ステップでは、前記ワークが前記把持部に把持されてから前記所定位置に移動されるまでの間において、前記第2腕部が前記所定方向と反対方向に前記第4軸で回転する、ことを特徴とする請求項1に記載のロボットの制御方法。
【請求項3】
前記第3ステップでは、前記加工後のワークが前記把持部に把持されてから前記パレットまたは前記別のパレットに移動されるまでの間において、前記第2腕部が前記所定方向と反対方向に前記第4軸で回転する、ことを特徴とする請求項1に記載のロボットの制御方法。
【請求項4】
前記所定位置は、前記加工空間内において予め定められた加工基準軸に対し同軸に位置する所定角0度から、前記加工基準軸に対し直交に位置する所定角90度までの範囲内において定められる、ことを特徴とする請求項1~3のいずれか一項に記載のロボットの制御方法。
【請求項5】
請求項1~3のいずれか一項に記載のロボットの制御方法を、前記ロボットを制御するコンピュータに実行させることを特徴とする制御プログラム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、ロボットの制御方法に関し、典型的には、垂直多関節型のロボットに対するものである。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
垂直多関節型のロボットとして、例えば、下記の特許文献1,2に開示されるものがある。この種のロボットは、水平多関節型のロボットや座標軸型のロボットに比べて自由度が高くて動作領域が広い。そのため、産業用ロボットとして、工場の生産ラインや加工システム等において、搬送用、溶接用、塗装用等の様々な用途に使用されている。
【0003】
ところで、ロボットが搬送するワークのなかには、細長い棒形状を有するものがある。垂直多関節型のロボットがこのような棒状のワークを搬送する場合、例えば、そのワーク軸の軸方向や径方向からロボットハンドを当該ワークに接近させて把持する。このようなワークに対するハンドのアプローチは、次工程に対するワークの受け渡しを極力円滑にする必要から、搬送先におけるワークの取り扱い状態を考慮した態様にすることが多い。
【0004】
例えば、搬送先の、パレット上に横に寝かせたりポケット内に縦に立てたりした状態でワークを次工程に受け渡す場合には、ワークに対してワーク軸の径方向からハンドを接近させてワークの中間部やその付近を把持する。軸方向からアプローチしてワークの端部を把持するよりも径方向からアプローチした方が把持可能な範囲(ワークの中間部付近等)が広くなり、またワークを横に寝かせた状態で載置し易いからである。
【0005】
一方、次工程の都合から、例えば、搬送先においてワーク軸を中心にワークを回転させる必要がある場合には、軸方向からハンドを接近させて当該ワークの端部を把持する。ロボットハンドが取り付けられる手首は、その軸を中心に回動可能な構成を有するものが多いため、軸方向からワークの端部を掴んだハンドを手首の軸で回転させることによって、ワーク軸を中心にワークを容易に回転させ得るからである。
【先行技術文献】
【特許文献】
【0006】
特開2012-139762号公報
特開2024-9167号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
しかしながら、次工程の都合から搬送先においてワーク軸を中心にワークを回転させる必要がある場合であっても、ワークの端部をロボットハンドで掴むことができないケースがある。例えば、把持位置に該当するワークの端部にハンドが触れるとその効果や機能が損なわれ得る溶剤や薬剤等が塗布されているケースや、品質管理上、ワークの端部が非接触領域に設定されているケース等においては、当該端部をハンドで掴むことができない。
【0008】
このようなケースにおいては、例えば、ワーク軸の径方向からハンドを接近させてワークの中間部付近を把持して一旦、中継テーブルまで搬送して当該端部(一端部)がテーブル面に接触しないように横に寝かせて載置した後、そのワークの反対側の他端部を軸方向から掴み直して搬送する方法が考えられる。これにより、把持位置を掴むことが許容されているケースと同様に、次工程においてワーク軸を中心にワークを容易に回転させることが可能になる。
【0009】
ところが、このような中継テーブルを介してロボットハンドでワークを掴み直す方法を採用した場合、中継テーブルにワークの載置する時間と把持し直す時間とが加わるため、ハンドによるワークの搬送時間が長くなってしまい、生産ラインや加工システムにおける単位時間あたりの加工効率が低下するという新たな問題が発生し得る。
【0010】
本発明は、上述した課題を解決するためになされたものであり、生産ラインや加工システム等における単位時間あたりの加工効率の低下を抑制し得るロボットの制御方法を提供することを目的とする。
【課題を解決するための手段】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
川崎重工業株式会社
ロボット
13日前
株式会社不二越
ロボット
12日前
株式会社三協システム
移載装置
1か月前
株式会社竹中工務店
補助セット
12日前
川崎重工業株式会社
ハンド
4日前
SMC株式会社
着脱装置
1か月前
トヨタ自動車株式会社
ロボット
7日前
株式会社不二越
移動ロボットシステム
15日前
工機ホールディングス株式会社
作業機
4日前
本田技研工業株式会社
装置
18日前
株式会社不二越
ロボットシステム
1か月前
株式会社不二越
エッジ仕上げ装置
25日前
川崎重工業株式会社
塗装システム
4日前
トヨタ自動車株式会社
軌道生成装置
7日前
株式会社不二越
垂直多関節ロボット
26日前
工機ホールディングス株式会社
作業機
4日前
アネックスツール株式会社
ドライバービット
11日前
シンフォニアテクノロジー株式会社
搬送装置
15日前
ライオン株式会社
移載システム
27日前
川崎重工業株式会社
ワーク搬送ロボット
4日前
ワールド技研株式会社
ロボットセル装置
12日前
株式会社マキタ
回転打撃工具
7日前
NTN株式会社
ハンド
13日前
セイコーエプソン株式会社
ロボット
11日前
倉敷紡績株式会社
ハンドおよびコネクタ接続方法
25日前
トヨタ自動車株式会社
ロボットの制御装置
11日前
山九株式会社
レンチ保持治具
7日前
株式会社マキタ
電動工具
1か月前
株式会社マキタ
電動工具
1か月前
株式会社マキタ
電動工具
15日前
NTN株式会社
作業装置
11日前
NTN株式会社
把持装置
13日前
NTN株式会社
把持装置
13日前
株式会社マキタ
電動工具
15日前
川崎重工業株式会社
ロボット
11日前
株式会社ノア・テクニカ
灯具取外具及び灯具取外方法
1か月前
続きを見る
他の特許を見る






 特許ウォッチ
特許ウォッチ