TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025151417
公報種別
公開特許公報(A)
公開日
2025-10-09
出願番号
2024052825
出願日
2024-03-28
発明の名称
軌道走行式クレーン
出願人
IHI運搬機械株式会社
代理人
弁理士法人山田特許事務所
主分類
B66C
23/90 20060101AFI20251002BHJP(巻上装置;揚重装置;牽引装置)
要約
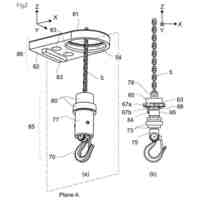
【課題】作業時における吊り上げ能力を最大限に引き出すことができる軌道走行式クレーンを提供する。
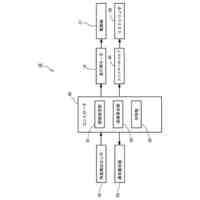
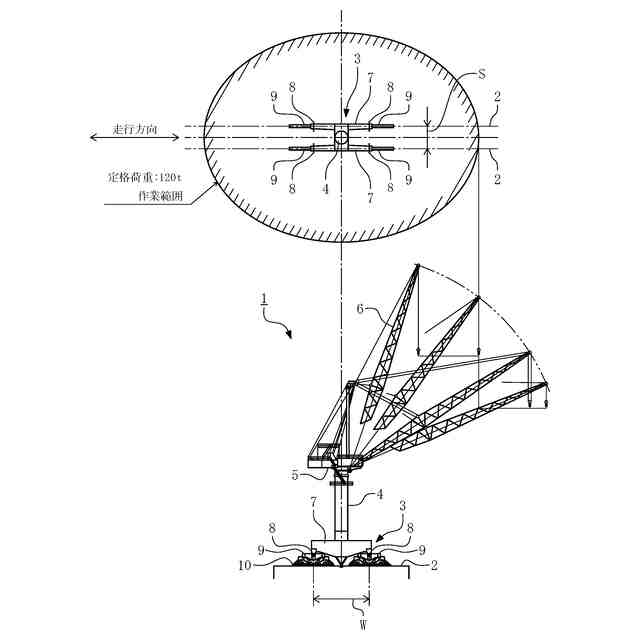
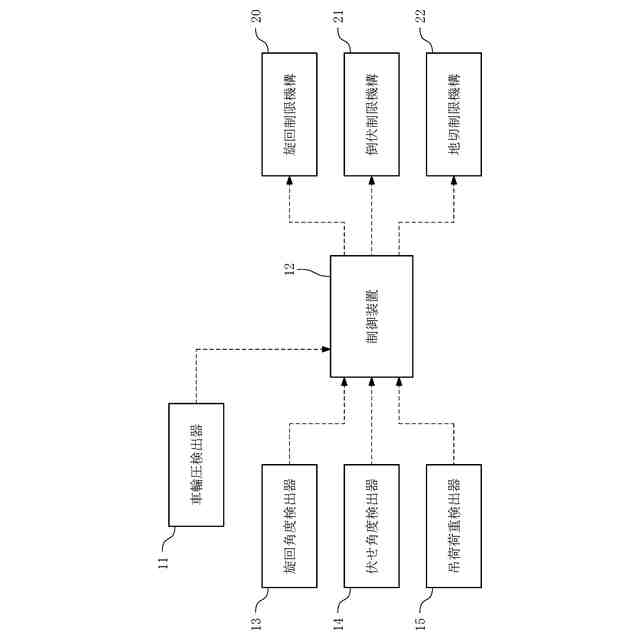
【解決手段】レール2に沿い転動自在な複数の走行車輪10を有する脚部9を走行体3に備え、該走行体3により前記レール2上を走行して荷役作業を行う軌道走行式クレーン1に関し、前記脚部9の各走行車輪10にかかる車輪圧を検出する車輪圧検出器と、作業時の安定度を担保するべくジブ6の伏せ角度や旋回角度が限界を超えないよう制御し且つ該制御と並行して前記車輪圧検出器により検出される車輪圧が基礎の許容車輪圧を超えないように監視する制御装置とを備える。
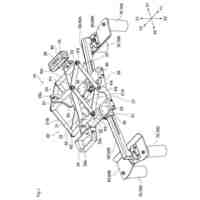
【選択図】図1
特許請求の範囲
【請求項1】
レールに沿い転動自在な複数の走行車輪を有する脚部を走行体に備え、該走行体により前記レール上を走行して荷役作業を行う軌道走行式クレーンであって、
前記脚部の各走行車輪にかかる車輪圧を検出する車輪圧検出器と、作業時の安定度を担保するべくジブの伏せ角度や旋回角度が限界を超えないよう制御し且つ該制御と並行して前記車輪圧検出器により検出される車輪圧が基礎の許容車輪圧を超えないように監視する制御装置とを備えた軌道走行式クレーン。
続きを表示(約 460 文字)
【請求項2】
制御装置は、車輪圧が基礎の許容車輪圧に達しない限りジブの伏せ角度や旋回角度が限界に達するまで伏せ運転や旋回運転を継続する一方、ジブの伏せ角度や旋回角度が限界に達していなくても車輪圧が基礎の許容車輪圧に達したら伏せ運転や旋回運転を停止するよう構成されている請求項1に記載の軌道走行式クレーン。
【請求項3】
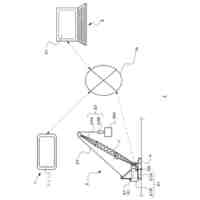
ジブの旋回角度を検出する旋回角度検出器と、ジブの伏せ角度を検出する伏せ角度検出器と、ジブにより吊り上げられる吊荷の荷重を検出する吊荷荷重検出器とが備えられ、これらの検出値に基づき作業時の安定度を担保するための制御が図られるよう制御装置が構成されている請求項1又は2に記載の軌道走行式クレーン。
【請求項4】
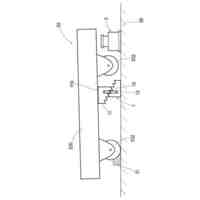
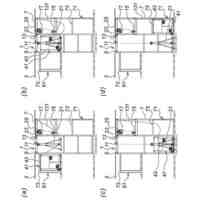
走行体に対する脚部の枢支点に車輪圧検出器が装備され、該車輪圧検出器で検出される荷重が検出値として制御装置に入力され且つその検出値を前記脚部の一つ当たりの車輪数で割ることで車輪圧が求められるように構成されている請求項2又は3記載の軌道走行式クレーン。
発明の詳細な説明
【技術分野】
【0001】
本発明は、軌道走行式クレーンに関するものである。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
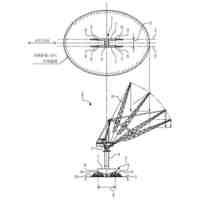
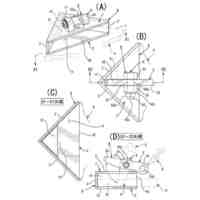
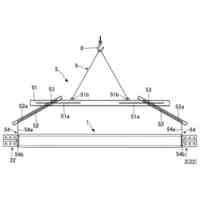
一般に、船舶を建造するドックなどには軌道走行式クレーンが配備されており、この種の軌道走行式クレーンは、基礎上に敷設されたレールに沿い走行体を走行自在に配設すると共に、該走行体上に立設したポストの頂部に旋回体を旋回自在に配設し、該旋回体にジブを起伏自在に設けた構成を有している。
【0003】
この種の軌道走行式クレーンを設置するための前提条件として、その基礎が耐え得る許容車輪圧というものが存在するが、例えば、軌道走行式クレーンの走行体の脚部が前後左右に備えられている場合、各脚部を結んだ矩形の対角方向にジブが向くように旋回し、斯かる状態で最大荷重を吊り上げながら前記ジブをある伏せ角度(最大モーメント発生状態)まで伏せた時に、前記対角方向に配置される脚部の何れかに最大車輪圧が発生することが判っており、この条件下で発生する最大車輪圧が前記基礎の許容車輪圧を超えないように配慮する必要がある。
【0004】
このため、従来にあっては、前述の如き条件下で発生する最大車輪圧が前記基礎の許容車輪圧以下に収まるように設計する一方、最大車輪圧が発生する条件下でのジブの伏せ角度を伏せ限界として定め、車輪圧がジブの向き(旋回角度)により異なるにも関わらず、旋回角度は度外視して前記伏せ限界を超えないようにジブの伏せ角度のみを制御し、作業時における軌道走行式クレーンの安定度を確保するようにしていた。
【0005】
尚、前記軌道走行式クレーンと関連する一般的技術水準を示すものとしては、例えば、特許文献1がある。
【先行技術文献】
【特許文献】
【0006】
特開2020-11734号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
しかしながら、このように伏せ限界を決めてジブの伏せ角度のみを制御していたのでは、その伏せ限界で決まる作業半径の円内に作業範囲が限定される結果、全ての旋回角度で同じ吊り上げ許容荷重となってしまい、例えば、軌道走行式クレーンの各脚部を結んだ矩形の対角方向にジブが向くように旋回した状態から更にレールに対し平行な方向にジブが向くように旋回させた場合、基礎にかかる車輪圧が軽減して伏せ角度や吊荷の荷重を大きくする余地があるのに制限がかかってしまうという課題があった。
【0008】
本発明は、上述の課題に鑑みてなしたもので、作業時における吊り上げ能力を最大限に引き出すことができる軌道走行式クレーンを提供するものである。
【課題を解決するための手段】
【0009】
本発明は、レールに沿い転動自在な複数の走行車輪を有する脚部を走行体に備え、該走行体により前記レール上を走行して荷役作業を行う軌道走行式クレーンであって、
前記脚部の各走行車輪にかかる車輪圧を検出する車輪圧検出器と、作業時の安定度を担保するべくジブの伏せ角度や旋回角度が限界を超えないよう制御し且つ該制御と並行して前記車輪圧検出器により検出される車輪圧が基礎の許容車輪圧を超えないように監視する制御装置とを備えた軌道走行式クレーン、に係るものである。
【0010】
また、本発明において、前記制御装置は、車輪圧が基礎の許容車輪圧に達しない限りジブの伏せ角度や旋回角度が限界に達するまで伏せ運転や旋回運転を継続する一方、ジブの伏せ角度や旋回角度が限界に達していなくても車輪圧が基礎の許容車輪圧に達したら伏せ運転や旋回運転を停止するよう構成されていることが好ましい。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
IHI運搬機械株式会社
軌道走行式クレーン
27日前
個人
自走手摺
3か月前
個人
転落防止階段
6日前
ユニパルス株式会社
吊具
5か月前
個人
小型クレーン
今日
個人
海上コンテナ昇降装置
10か月前
ユニパルス株式会社
吊具装置
11か月前
ユニパルス株式会社
荷役装置
10か月前
株式会社いうら
車椅子用昇降機
3か月前
水戸工業株式会社
吊り具
7か月前
株式会社豊田自動織機
荷役車両
10か月前
ユニパルス株式会社
リフト装置
5か月前
株式会社豊田自動織機
産業車両
1か月前
株式会社豊田自動織機
荷役車両
9か月前
株式会社豊田自動織機
産業車両
11か月前
ユニパルス株式会社
荷役助力装置
3か月前
愛知製鋼株式会社
受け架台
2か月前
白山工業株式会社
バランサ
7か月前
個人
垂直自動搬送機
1か月前
株式会社伊藤
滑り止め装置
3か月前
ユニパルス株式会社
荷役助力装置
6か月前
個人
エアバック式レスキュー用品
29日前
株式会社大林組
安全支援システム
2か月前
大栄産業株式会社
クランプ
5か月前
岐阜工業株式会社
運搬台車
7日前
ユニパルス株式会社
荷役助力装置
5か月前
株式会社キトー
タイヤ用吊具
6か月前
株式会社ユピテル
システム等
6か月前
株式会社豊田自動織機
フォークリフト
8か月前
大和ハウス工業株式会社
吊上具
2か月前
株式会社豊田自動織機
フォークリフト
1か月前
株式会社五十鈴製作所
搬送装置
5か月前
中国計量大学
電子安全クランプ
1か月前
フジテック株式会社
エレベータ
9か月前
新英運輸株式会社
自動車用台車
6か月前
フジテック株式会社
エスカレータ
7か月前
続きを見る
他の特許を見る





 特許ウォッチ
特許ウォッチ