TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025151093
公報種別
公開特許公報(A)
公開日
2025-10-09
出願番号
2024052334
出願日
2024-03-27
発明の名称
飛行体
出願人
本田技研工業株式会社
代理人
個人
,
個人
,
個人
主分類
B64C
25/20 20060101AFI20251002BHJP(航空機;飛行;宇宙工学)
要約
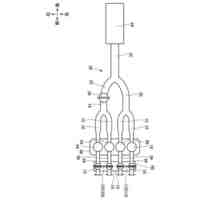
【課題】簡易な構成で着陸脚を保持することが可能な飛行体を提供する。
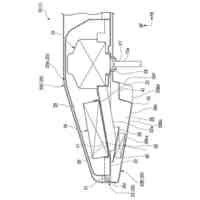
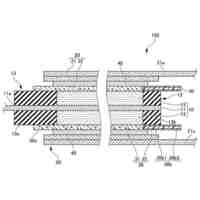
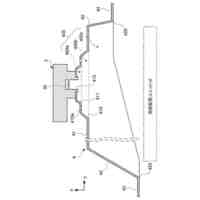
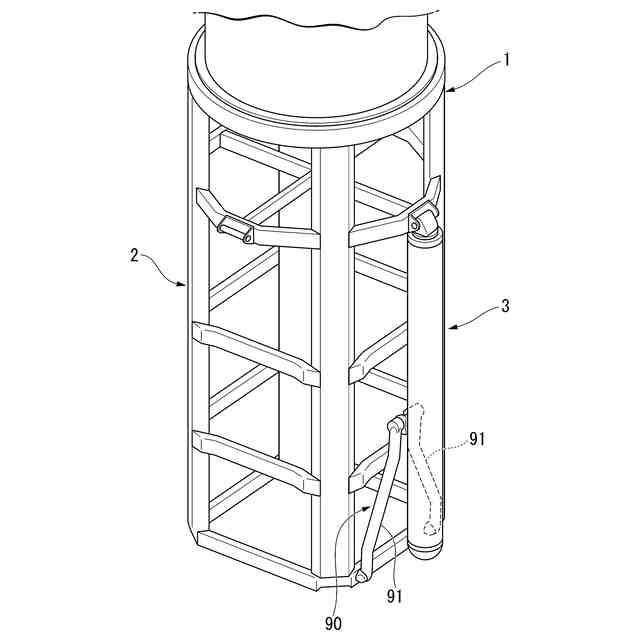
【解決手段】実施形態の飛行体は、飛行体本体2と、飛行体本体2に沿った位置に格納される格納状態と、飛行体本体2から離れる位置に展開される展開状態と、で遷移可能に構成された着陸脚と、を備える。飛行体本体2は、飛行体本体2の一部から突出する第1突起11を備える。着陸脚は、着陸脚の一部から突出する第2突起12を備える。第1突起11及び第2突起12は、格納状態では飛行体本体2から離れる方向に互いに対向する。
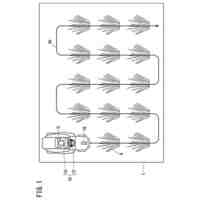
【選択図】図1
特許請求の範囲
【請求項1】
飛行体本体と、
前記飛行体本体に沿った位置に格納される格納状態と、前記飛行体本体から離れる位置に展開される展開状態と、で遷移可能に構成された着陸脚と、を備え、
前記飛行体本体は、前記飛行体本体の一部から突出する第1突起を備え、
前記着陸脚は、前記着陸脚の一部から突出する第2突起を備え、
前記第1突起及び前記第2突起は、前記格納状態では前記飛行体本体から離れる方向に互いに対向する、
飛行体。
続きを表示(約 720 文字)
【請求項2】
前記第1突起は、所定の軸を中心に回動可能とされる、
請求項1に記載の飛行体。
【請求項3】
前記第1突起が前記所定の軸を中心に回動することで、前記第1突起及び前記第2突起同士の対向を解除する、
請求項2に記載の飛行体。
【請求項4】
前記第1突起及び前記第2突起は、前記格納状態では前記所定の軸に沿う方向から見て互いに重なる、
請求項2又は3に記載の飛行体。
【請求項5】
前記飛行体本体の外側部にフレームを備え、
前記第1突起及び前記第2突起は、前記格納状態では前記飛行体本体に対して前記フレームよりも外側で互いに対向する、
請求項1から3の何れか一項に記載の飛行体。
【請求項6】
前記フレームの直上に、前記第1突起を駆動する駆動部を備える、
請求項5に記載の飛行体。
【請求項7】
前記格納状態では、前記駆動部に電力が供給されない、
請求項6に記載の飛行体。
【請求項8】
前記第1突起を含むとともに、前記駆動部の駆動力により回動可能に構成されたレバーを備える、
請求項6に記載の飛行体。
【請求項9】
前記レバーの一部は、前記フレームの直上において前記フレームに沿う形状に形成される、
請求項8に記載の飛行体。
【請求項10】
前記格納状態では前記第1突起及び前記第2突起同士の対向を保持するよう前記レバーを付勢する付勢部材を備える、
請求項8に記載の飛行体。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、飛行体に関する。
続きを表示(約 1,000 文字)
【背景技術】
【0002】
例えば、特許文献1には、飛行隊の着陸脚を収納状態に保持する構造が開示されている。この構造では、2つのシリンダ構造体の相対移動と相対回転とにより、着陸脚の収納状態と展開状態とを切り替える。
【先行技術文献】
【特許文献】
【0003】
特開2023-148642号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、着陸脚の収納状態を保持するための可動装置及び/又は追加の機構は必要となる。そのため、簡易な構成で着陸脚を保持することが可能な飛行体が要求されている。
【0005】
そこで本発明は、簡易な構成で着陸脚を保持することが可能な飛行体を提供することを目的とする。
【課題を解決するための手段】
【0006】
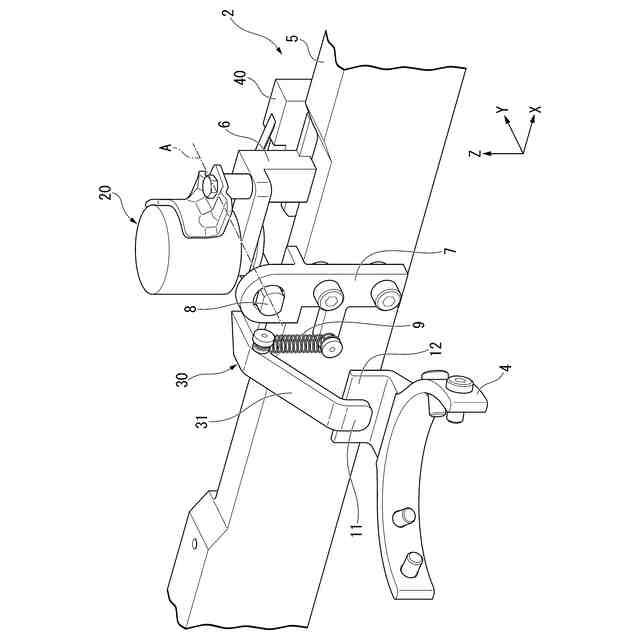
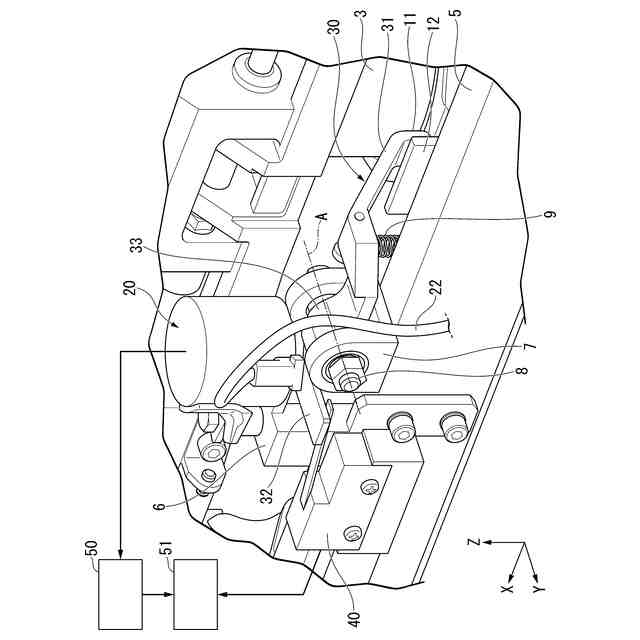
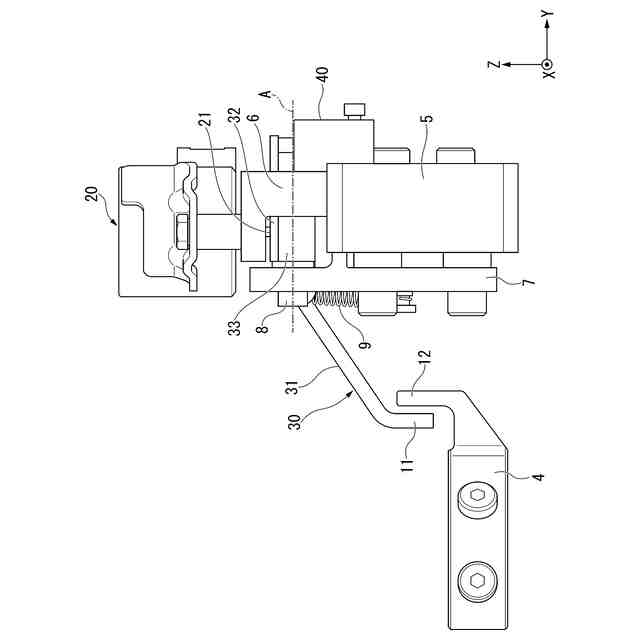
(1)本発明の一態様に係る飛行体(例えば、実施形態における飛行体1)は、飛行体本体(例えば、実施形態における飛行体本体2)と、前記飛行体本体に沿った位置に格納される格納状態と、前記飛行体本体から離れる位置に展開される展開状態と、で遷移可能に構成された着陸脚(例えば、実施形態における着陸脚3)と、を備え、前記飛行体本体は、前記飛行体本体の一部から突出する第1突起(例えば、実施形態における第1突起11)を備え、前記着陸脚は、前記着陸脚の一部から突出する第2突起(例えば、実施形態における第2突起12)を備え、前記第1突起及び前記第2突起は、前記格納状態では前記飛行体本体から離れる方向に互いに対向する。
【0007】
(2)本発明の一態様において、前記第1突起は、所定の軸(例えば、実施形態における所定の軸A)を中心に回動可能とされてもよい。
【0008】
(3)本発明の一態様において、前記第1突起が前記所定の軸を中心に回動することで、前記第1突起及び前記第2突起同士の対向を解除してもよい。
【0009】
(4)本発明の一態様において、前記第1突起及び前記第2突起は、前記格納状態では前記所定の軸に沿う方向から見て互いに重なってもよい。
【0010】
(5)本発明の一態様において、前記飛行体本体の外側部にフレーム(例えば、実施形態におけるフレーム5)を備え、前記第1突起及び前記第2突起は、前記格納状態では前記飛行体本体に対して前記フレームよりも外側で互いに対向してもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
本田技研工業株式会社
車両
1か月前
本田技研工業株式会社
車両
1か月前
本田技研工業株式会社
車両
1か月前
本田技研工業株式会社
電気機器
1か月前
本田技研工業株式会社
排気装置
1か月前
本田技研工業株式会社
排気装置
1か月前
本田技研工業株式会社
固体電池
1か月前
本田技研工業株式会社
触媒装置
1か月前
本田技研工業株式会社
二次電池
1か月前
本田技研工業株式会社
除草装置
1か月前
本田技研工業株式会社
排気装置
1か月前
本田技研工業株式会社
固体電池
1か月前
本田技研工業株式会社
内燃機関
1か月前
本田技研工業株式会社
制御装置
1か月前
本田技研工業株式会社
発電セル
1か月前
本田技研工業株式会社
全固体電池
1か月前
本田技研工業株式会社
電動船外機
1か月前
本田技研工業株式会社
鞍乗型車両
1か月前
本田技研工業株式会社
リアクトル
1か月前
本田技研工業株式会社
電極積層体
1か月前
本田技研工業株式会社
鞍乗型車両
1か月前
本田技研工業株式会社
全固体電池
1か月前
本田技研工業株式会社
鞍乗型車両
1か月前
本田技研工業株式会社
作業システム
1か月前
本田技研工業株式会社
鞍乗り型車両
1か月前
本田技研工業株式会社
鞍乗り型車両
1か月前
本田技研工業株式会社
電池製造装置
1か月前
本田技研工業株式会社
車両制御装置
1か月前
本田技研工業株式会社
作業システム
1か月前
本田技研工業株式会社
燃料電池構造
1か月前
本田技研工業株式会社
車両制御装置
1か月前
本田技研工業株式会社
燃料電池装置
1か月前
本田技研工業株式会社
移動システム
1か月前
本田技研工業株式会社
始動制御装置
1か月前
本田技研工業株式会社
始動制御装置
1か月前
本田技研工業株式会社
遊戯システム
1か月前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ