TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025153482
公報種別
公開特許公報(A)
公開日
2025-10-10
出願番号
2024055987
出願日
2024-03-29
発明の名称
作業システム
出願人
本田技研工業株式会社
代理人
弁理士法人桐朋
主分類
H04Q
9/00 20060101AFI20251002BHJP(電気通信技術)
要約
【課題】遠隔操作される作業用機材によって作業が行われる良好な作業システムを提供する。
【解決手段】遠隔操作される作業用機材12によって作業領域Rgにおける作業対象Tgの駆除作業を行う作業システム10は、作業用機材12が備えられた作業用移動体14の周囲の現実空間に対応する仮想空間画像Vsを生成する画像生成部108を有する管理装置16と、画像生成部108によって生成される仮想空間画像Vsを表示部120に表示する表示制御部142を有する機材遠隔操作装置18と、を備える。画像生成部108は、作業用機材12に応じた仮想画像Viを含む仮想空間画像Vsを生成し、作業対象Tgを強調する。
【選択図】図1
特許請求の範囲
【請求項1】
遠隔操作される作業用機材によって作業が行われ得る作業システムであって、
前記作業用機材が備えられた作業用移動体の周囲の現実空間に対応する仮想空間画像を生成する画像生成部と、
前記画像生成部によって生成される前記仮想空間画像を表示部に表示する表示制御部と、
を備え、
前記画像生成部は、前記作業用機材に応じた仮想画像を含む前記仮想空間画像を生成する、作業システム。
続きを表示(約 1,500 文字)
【請求項2】
請求項1に記載の作業システムにおいて、
前記画像生成部は、前記作業の対象となる作業対象に対応する部位に画像処理が施された前記仮想空間画像を生成する、作業システム。
【請求項3】
請求項2に記載の作業システムにおいて、
前記画像処理は、前記作業対象を強調する画像処理である、作業システム。
【請求項4】
請求項2に記載の作業システムにおいて、
前記画像処理は、前記作業対象に応じた画像を前記作業対象に重畳する画像処理である、作業システム。
【請求項5】
請求項1に記載の作業システムにおいて、
前記作業用移動体は遠隔操作される、作業システム。
【請求項6】
請求項1に記載の作業システムにおいて、
前記作業に関する情報である作業情報と、前記作業用機材の操作を希望する機材操作希望者に関する機材操作希望者データと、前記作業用移動体の操作を希望する移動体操作希望者に関する移動体操作希望者データとに基づいて、前記作業用機材の操作を行う機材操作者と、前記作業用移動体の操作を行う移動体操作者とを決定する操作者決定部を更に備える、作業システム。
【請求項7】
請求項1に記載の作業システムにおいて、
前記作業に関する情報である作業情報と、前記作業用機材の操作を希望する機材操作希望者に関する機材操作希望者データとに基づいて、前記作業用機材の操作を行う機材操作者を決定する機材操作者決定部を更に備え、
前記機材操作希望者データは、前記機材操作希望者が操作可能な前記作業用機材に関する情報、前記機材操作希望者の作業履歴、及び、前記機材操作希望者のスキルのうちの少なくともいずれかを含む、作業システム。
【請求項8】
請求項1に記載の作業システムにおいて、
前記作業に関する情報である作業情報と、前記作業用移動体の操作を希望する移動体操作希望者に関する移動体操作希望者データに基づいて、前記作業用移動体の操作を行う移動体操作者を決定する移動体操作者決定部を更に備え、
前記移動体操作希望者データは、前記移動体操作希望者が操作可能な前記作業用移動体に関する情報、前記移動体操作希望者の移動体操作履歴、及び、前記移動体操作希望者のスキルのうちの少なくともいずれかを含む、作業システム。
【請求項9】
請求項1に記載の作業システムにおいて、
前記作業に関する情報である作業情報と、前記作業用機材の操作を希望する機材操作希望者に関する機材操作希望者データに基づいて、前記作業用機材の操作を行う機材操作者を決定する機材操作者決定部を更に備え、
前記機材操作希望者データは、前記機材操作希望者が対応可能な作業領域に関する情報、及び、前記機材操作希望者が対応可能な地理的条件に関する情報のうちの少なくともいずれかを含む、作業システム。
【請求項10】
請求項1に記載の作業システムにおいて、
前記作業に関する情報である作業情報と、前記作業用移動体の操作を希望する移動体操作希望者に関する移動体操作希望者データに基づいて、前記作業用移動体の操作を行う移動体操作者を決定する移動体操作者決定部を更に備え、
前記移動体操作希望者データは、前記移動体操作希望者が対応可能な作業領域に関する情報、及び、前記移動体操作希望者が対応可能な地理的条件に関する情報のうちの少なくともいずれかを含む、作業システム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、作業システムに関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
特許文献1には、仮想空間表示システムが開示される。このシステムにおいて、自動運転される車両の搭乗者は、ヘッドマウントディスプレイを装着する。ヘッドマウントディスプレイは、車両の搭乗者に対して車両の周囲の実環境とは異なる仮想空間画像の表示を行う。
【先行技術文献】
【特許文献】
【0003】
特許第6232649号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1に開示された技術は、実環境とは異なる仮想空間の表示を行うことを単に開示しているに過ぎない。近時では良好な作業システムの提供が望まれる。
【0005】
本発明は、上述した課題を解決することを目的とする。
【課題を解決するための手段】
【0006】
本開示の態様は、遠隔操作される作業用機材によって作業が行われ得る作業システムであって、前記作業用機材が備えられた作業用移動体の周囲の現実空間に対応する仮想空間画像を生成する画像生成部と、前記画像生成部によって生成される前記仮想空間画像を表示部に表示する表示制御部と、を備え、前記画像生成部は、前記作業用機材に応じた仮想画像を含む前記仮想空間画像を生成する、作業システムである。
【発明の効果】
【0007】
本発明によれば、良好な作業システムを提供することができる。
【図面の簡単な説明】
【0008】
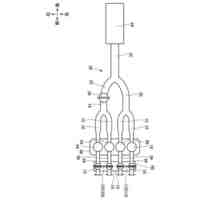
図1は、作業システムと、作業用機材による作業とを例示する図である。
図2は、作業用移動体の機能ブロック図である。
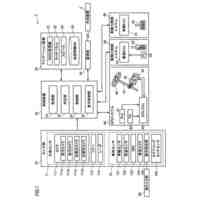
図3は、管理装置の機能ブロック図である。
図4は、機材遠隔操作装置の機能ブロック図である。
図5は、移動体遠隔操作装置の機能ブロック図である。
図6A及び図6Bは、仮想空間画像を例示する図である。
図7は、仮想空間画像を例示する図である。
図8A及び図8Bは、作業用移動体の動作例を示すフローチャートである。
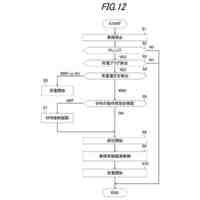
図9A及び図9Bは、管理装置の動作例を示すフローチャートである。
図10A及び図10Bは、機材遠隔操作装置の動作例を示すフローチャートである。
図11A及び図11Bは、移動体遠隔操作装置の動作例を示すフローチャートである。
図12は、管理装置の機能ブロック図である。
図13は、機材操作希望者データの例を説明するための図である。
図14は、移動体操作希望者データの例を説明するための図である。
図15は、管理装置の動作例を示すフローチャートである。
図16は、管理装置の機能ブロック図である。
【発明を実施するための形態】
【0009】
図1は、作業システム10と、作業用機材12による作業とを例示する図である。作業システム10においては、遠隔操作される作業用機材12によって所定の作業が行われ得る。所定の作業は、作業領域Rgにおける作業対象Tgの駆除作業である。所定の作業の対象となる作業対象Tgは、例えば害虫、害獣等である。作業領域Rgは、例えば農耕地、山林、庭園等である。図1に示す例では、農耕地である作業領域Rg内の作物に付いた害虫である作業対象Tgを作業用機材12によって駆除する作業が行われる。
【0010】
図1に示す作業用機材12は、エアガンである。エアガンが作業対象Tgに向けられ、弾丸が発射されて作業対象Tgに命中することによって、作業対象Tgが駆除され得る。本実施形態において、作業用機材12はエアガンであるが、これに限定されない。作業用機材12は、例えば、ハエ叩き、猟銃等であってもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
本田技研工業株式会社
車両
1か月前
本田技研工業株式会社
車両
1か月前
本田技研工業株式会社
車両
1か月前
本田技研工業株式会社
車両
1か月前
本田技研工業株式会社
車両
1か月前
本田技研工業株式会社
飛行体
1か月前
本田技研工業株式会社
発電セル
1か月前
本田技研工業株式会社
触媒装置
1か月前
本田技研工業株式会社
電気機器
1か月前
本田技研工業株式会社
エンジン
1か月前
本田技研工業株式会社
固体電池
1か月前
本田技研工業株式会社
制御装置
1か月前
本田技研工業株式会社
電気機器
1か月前
本田技研工業株式会社
内燃機関
1か月前
本田技研工業株式会社
排気装置
1か月前
本田技研工業株式会社
固体電池
1か月前
本田技研工業株式会社
二次電池
1か月前
本田技研工業株式会社
内燃機関
1か月前
本田技研工業株式会社
排気装置
1か月前
本田技研工業株式会社
排気装置
1か月前
本田技研工業株式会社
清掃装置
1か月前
本田技研工業株式会社
収容装置
1か月前
本田技研工業株式会社
除草装置
1か月前
本田技研工業株式会社
電気部品
1か月前
本田技研工業株式会社
電極積層体
1か月前
本田技研工業株式会社
リアクトル
1か月前
本田技研工業株式会社
鞍乗型車両
1か月前
本田技研工業株式会社
鞍乗型車両
1か月前
本田技研工業株式会社
全固体電池
1か月前
本田技研工業株式会社
全固体電池
1か月前
本田技研工業株式会社
樹脂成型品
1か月前
本田技研工業株式会社
鞍乗型車両
1か月前
本田技研工業株式会社
電動船外機
1か月前
本田技研工業株式会社
車両制御装置
1か月前
本田技研工業株式会社
移動システム
1か月前
本田技研工業株式会社
始動制御装置
1か月前
続きを見る
他の特許を見る










 特許ウォッチ
特許ウォッチ