TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025147372
公報種別
公開特許公報(A)
公開日
2025-10-07
出願番号
2024047592
出願日
2024-03-25
発明の名称
クレーン運転システム及びごみ処理方法
出願人
三機工業株式会社
代理人
個人
,
個人
主分類
B66C
13/48 20060101AFI20250930BHJP(巻上装置;揚重装置;牽引装置)
要約
【課題】作業内容に応じてクレーンを効率的に運転する。
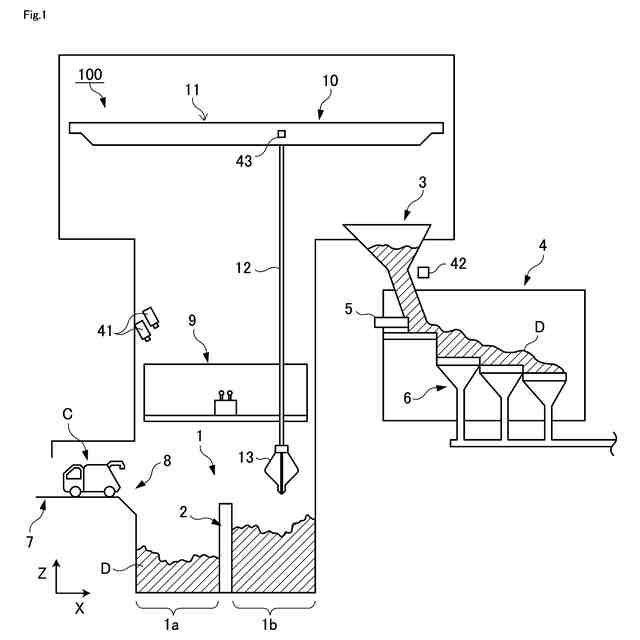
【解決手段】クレーン運転システムは、ごみピット1内に貯留されたごみDを移送可能なクレーン10と、このクレーン10を制御する制御部を備える。制御部は、クレーン10によりごみピット1内でのごみDの配置状態変更作業を実行する場合に、ごみDを掴み上げて移動した後に第1放し高さでごみを放すようにクレーン10を制御する。制御部は、クレーン10によりごみピット1内でごみDの破袋を実行する場合には、ごみDを掴み上げて移動した後に第2放し高さでごみを放すように前記クレーンを制御する。第2放し高さは、第1放し高さよりも高く設定される。
【選択図】図5
特許請求の範囲
【請求項1】
ごみピット内に貯留されたごみを移送可能なクレーンと、前記クレーンを制御する制御部を備える、クレーン運転システムであって、
前記制御部は、前記クレーンにより前記ごみピット内でのごみの配置状態変更作業を実行する場合に、ごみを掴み上げて移動した後に第1放し高さでごみを放すように前記クレーンを制御し、
前記制御部は、前記クレーンにより前記ごみピット内でごみの破袋を実行する場合には、ごみを掴み上げて移動した後に第2放し高さでごみを放すように前記クレーンを制御し、
前記第2放し高さは、前記第1放し高さよりも高い
クレーン運転システム。
続きを表示(約 2,100 文字)
【請求項2】
前記ごみピットは、ごみの搬入口付近に設けられた受入ピットと、前記受入ピットよりも前記搬入口から離れた位置に設けられた貯留ピットと、前記受入ピットと前記貯留ピットの間に設けられた仕切り壁を含み、
前記制御部は、前記クレーンにより前記受入ピットで掴み上げたごみを前記貯留ピットへ移送する配置状態変更作業を実行する場合に、ごみを掴み上げて前記仕切り壁よりも高い第1移動高さで移動した後に前記第1放し高さでごみを放すように前記クレーンを制御し、
前記制御部は、前記クレーンにより前記受入ピットで掴み上げたごみを前記貯留ピットへ移送する際に当該ごみの破袋を実行する場合には、ごみを掴み上げて前記仕切り壁よりも高い第2移動高さで移動した後に前記第2放し高さでごみを放すように前記クレーンを制御し、
前記第2移動高さは、前記第1移動高さよりも高い
請求項1に記載のクレーン運転システム。
【請求項3】
前記ごみピットは、ごみの搬入口付近に設けられた受入ピットと、前記受入ピットよりも前記搬入口から離れた位置に設けられた貯留ピットと、前記受入ピットと前記貯留ピットの間に設けられた仕切り壁を含み、
前記制御部は、前記クレーンにより前記貯留ピットのある区画で掴み上げたごみを前記貯留ピットの別の区画へ移送する配置状態変更作業を実行する場合は、ごみを掴み上げて第1移動高さで移動した後に前記第1放し高さでごみを放すように前記クレーンを制御し、
前記制御部は、前記クレーンにより前記貯留ピットのある区画で掴み上げたごみを前記貯留ピットの別の区画へ移送する際に当該ごみの破袋を実行する場合は、ごみを掴み上げて第2移動高さで移動した後に前記第2放し高さでごみを放すように前記クレーンを制御し、
前記第2移動高さは、前記第1移動高さよりも高い
請求項1に記載のクレーン運転システム。
【請求項4】
前記第2移動高さと前記第2放し高さは実質的に同じ高さである
請求項2又は請求項3に記載のクレーン運転システム。
【請求項5】
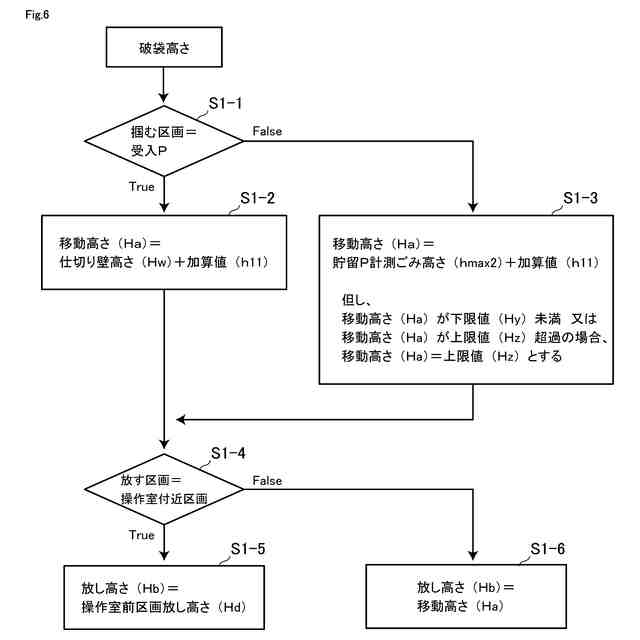
前記制御部は、前記クレーンにより前記ごみピット内でごみの破袋を実行する場合であって、前記クレーンがごみを放す位置が操作室付近の区画以外である場合は、ごみを掴み上げて移動した後に前記第2放し高さでごみを放すように前記クレーンを制御し、
前記制御部は、前記クレーンにより前記ごみピット内でごみの破袋を実行する場合であって、前記クレーンがごみを放す位置が操作室付近の区画である場合は、ごみを掴み上げて移動した後に操作室前区画用の放し高さでごみを放すように前記クレーンを制御し、
前記操作室前区画用の放し高さは、前記第2放し高さよりも低い
請求項1に記載のクレーン運転システム。
【請求項6】
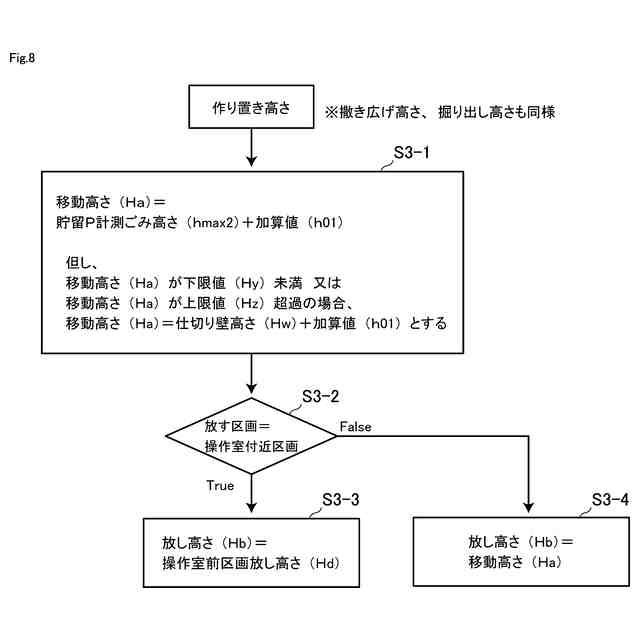
前記配置状態変更作業は、移し替え、撒き広げ、作り置き、又は掘り出しのいずれかである
請求項1に記載のクレーン運転システム。
【請求項7】
ごみピット内に貯留されたごみをクレーンにより移送するごみ処理方法であって、
前記クレーンにより前記ごみピット内でのごみの配置状態変更作業を実行する場合は、ごみを掴み上げて移動した後に第1放し高さでごみを放すように前記クレーンを制御し、
前記クレーンにより前記ごみピット内でごみの破袋を実行する場合には、ごみを掴み上げて移動した後に第2放し高さでごみを放すように前記クレーンを制御し、
前記第2放し高さは、前記第1放し高さよりも高い
ごみ処理方法。
【請求項8】
ごみピット内に貯留されたごみを移送可能なクレーンと、前記クレーンを制御する制御部を備える、クレーン運転システムであって、
前記制御部は、前記クレーンにより前記ごみピット内でのごみの移し替え、撒き広げ、作り置き、及び掘り出しのうちのいずれかを実行する場合に、ごみを掴み上げて移動した後に第1放し高さでごみを放すように前記クレーンを制御し、
前記制御部は、前記クレーンにより前記ごみピット内でごみの破袋を実行する場合には、ごみを掴み上げて移動した後に第2放し高さでごみを放すように前記クレーンを制御し、
前記第2放し高さは、前記第1放し高さよりも高い
クレーン運転システム。
【請求項9】
ごみピット内に貯留されたごみをクレーンにより移送するごみ処理方法であって、
前記クレーンにより前記ごみピット内でのごみの移し替え、撒き広げ、作り置き、及び掘り出しのうちのいずれかを実行する場合は、ごみを掴み上げて移動した後に第1放し高さでごみを放すように前記クレーンを制御し、
前記クレーンにより前記ごみピット内でごみの破袋を実行する場合には、ごみを掴み上げて移動した後に第2放し高さでごみを放すように前記クレーンを制御し、
前記第2放し高さは、前記第1放し高さよりも高い
ごみ処理方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、ごみピット内のごみを移送可能なクレーンを制御するためのクレーン運転システムに関する。また、本発明は、このクレーンを利用したごみ処理方法に関する。
続きを表示(約 2,700 文字)
【背景技術】
【0002】
従来から、ごみ処理施設では、収集車から搬入されるごみをごみピット内に一時的に貯留しておき、貯留したごみをクレーンにより掴み上げてホッパに移送して、このホッパから焼却炉に投入することが行われている。また、ごみ処理施設においては、ごみクレーンを操作する運転員がごみピット内を目視しながら、ごみの種類や性質が均等になるようにごみピット内でごみを移し替えたり、あるいは未破袋のごみを破袋する(ごみを掴みあげて落とし、ごみ袋を破る)といった作業が行われている。
【0003】
このようなごみ処理施設に関して、本願出願人は、ごみの種類を自動的に高い精度で判定して、ごみの種類に応じて適切な操作を実行することが可能なクレーンの運転システムを提案している(特許文献1)。具体的には、特許文献1のクレーン運転システムは、ごみピット内に貯留されたごみをホッパに移送するごみクレーンと、ごみピット内の画像を取得する撮像部と、撮像部により取得された画像に基づいてごみの種類を判定するごみ種判定部を備えることを主な特徴とする。また、このクレーン運転システムは、移送、破袋、撹拌、作り置き、移し替え、接近回避、及び掴み直しといった複数の作業の中から選択されたものをクレーンに実行させることができる。
【先行技術文献】
【特許文献】
【0004】
特開2021-46288号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
ところで、特許文献1に記載のクレーン運転システムでは、クレーンが実行する作業として、破袋以外にも、例えば移送、撹拌、作り置き、及び移し替えといったようなごみピット内でのごみの配置状態変更する作業を行うことが可能である。ただし、特許文献1では、破袋やその他の配置状態変更作業を実行する際にクレーンを移動する高さ(「移動高さ」という)や、クレーンの移動後にごみを放す高さについては言及されておらず、それらの詳細については未検討である。
【0006】
ここで、破袋を実行する際のクレーンの放し高さが不十分である場合、ごみ袋を掴み上げてごみピット内に落下させたとしても、ごみ袋に対して十分な衝撃を与えられずにごみ袋が破れない可能性がある。そこで、ごみ袋を確実に破れさせるためにクレーンの移動高さや放し高さを全体的に高くすることも検討されるが、その場合には、その他の移し替えや作り置きなどのごみの配置状態を変更することを目的とした作業においては、不必要にクレーンを高く上げる必要が生じることになる。クレーンを高く上げるためには、その分ワイヤロープの巻き上げに時間を要するため、クレーンの移動高さや放し高さを全体的に高してしまうと、破袋以外の作業においては作業効率が低下してしまうという別の問題が生じ得る。
【0007】
そこで、本発明は、作業内容に応じてクレーンを効率的に運転できるようにすることを主な目的とする。
【課題を解決するための手段】
【0008】
本発明の発明者は、上記の従来発明の課題を解決する手段について鋭意検討した結果、クレーンを利用してごみピット内のごみの配置状態を変更する作業(移し替え、作り置きなど)を実行する場合と比較して、破袋を実行する場合のクレーンによるごみの放し高さを高く設定することにより、ごみ袋を破ることのできる確実性を高めると共に、ごみの配置状態を変更するときにはごみを短時間で効率的に移送できるようになるという知見を得た。そして、本発明者は、上記知見に基づけば従来発明の課題を解決できることに想到し、本発明を完成させた。具体的に説明すると、本発明は以下の構成又は工程を有する。
【0009】
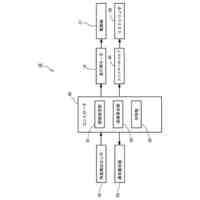
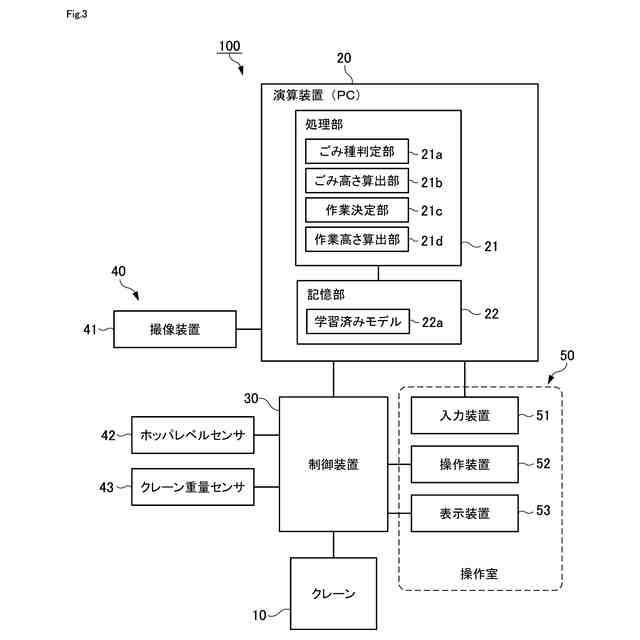
本発明の第1の側面は、クレーン運転システムに関する。本発明に係るクレーン運転システムは、クレーンと制御部を備える。クレーンは、ごみピット内に貯留されたごみを移送可能に構成されている。また、制御部は、このクレーンを制御する。なお、制御部は、単一の装置によって実現することとしてもよいし、演算装置と制御装置などの複数の装置に機能を分散させて実現することとしてもよい。制御部は、クレーンによりごみピット内でのごみの配置状態変更作業を実行する場合に、ごみを掴み上げて移動した後に第1放し高さでごみを放すようにクレーンを制御する。なお、本願明細書において、配置状態変更作業とは、破袋以外の作業を意味する。また、制御部は、クレーンによりごみピット内でごみの破袋を実行する場合には、ごみを掴み上げて移動した後に第2放し高さでごみを放すようにクレーンを制御する。そして、破袋時における第2放し高さは、配置状態変更作業時における第1放し高さよりも高く設定されている。このように、破袋時の第2放し高さを比較的高くすることで、ごみ袋をより確実に破ることができるようになる。一方で、配置状態変更作業時の第1放し高さを比較的低くすることで、クレーンを高く巻き上げる時間を省略することができるため、ごみの移送効率が向上する。
【0010】
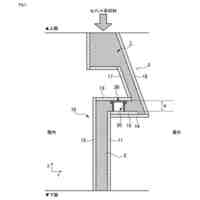
本発明に係るクレーン運転システムにおいて、ごみピットは、受入ピットと、貯留ピットと、仕切り壁を含むことが好ましい。受入ピットは、ごみの搬入口付近に設けられている。搬入口から投入されたごみは、まずこの受入ピットに貯留されることになる。貯留ピットは、受入ピットよりも搬入口から離れた位置に設けられている。受入ピットに貯留されているごみは、クレーンにより貯留ピットへと移し替えられる。仕切り壁は、受入ピットと貯留ピットの間に設けられている。この場合に、制御部は、クレーンにより受入ピットで掴み上げたごみを貯留ピットへ移送する配置状態変更作業(破袋以外)を実行する場合には、ごみを掴み上げて仕切り壁よりも高い第1移動高さで移動した後に第1放し高さでごみを放すようにクレーンを制御する。また、制御部は、クレーンにより受入ピットで掴み上げたごみを貯留ピットへ移送する際に当該ごみの破袋を実行する場合には、ごみを掴み上げて仕切り壁よりも高い第2移動高さで移動した後に第2放し高さでごみを放すようにクレーンを制御する。そして、破袋時における第2移動高さは、それ以外の配置状態変更作業時における第1移動高さよりも高く設定されていることが好ましい。このように、配置状態変更作業時の第1放し高さを比較的低くすることで、クレーンを高く巻き上げる時間を省略することができるため、ごみの移送効率がさらに向上する。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
三機工業株式会社
下水汚泥焼却灰の肥料化方法
1か月前
三機工業株式会社
壁吸い込みフィルタユニットのパンチングフェースおよび戸袋の構造
2か月前
三機工業株式会社
セメント構造体内へのスリーブ埋設施工方法及びセメント構造体の製造方法
1か月前
三機工業株式会社
高天井倉庫への空調システムの設置方法
1か月前
個人
自走手摺
4か月前
個人
転落防止階段
1か月前
個人
小型クレーン
1か月前
ユニパルス株式会社
吊具
6か月前
個人
海上コンテナ昇降装置
12か月前
ユニパルス株式会社
荷役装置
11か月前
株式会社いうら
車椅子用昇降機
4か月前
株式会社豊田自動織機
荷役車両
11か月前
株式会社豊田自動織機
荷役車両
10か月前
株式会社豊田自動織機
産業車両
3か月前
ユニパルス株式会社
リフト装置
6か月前
水戸工業株式会社
吊り具
8か月前
愛知製鋼株式会社
受け架台
3か月前
ユニパルス株式会社
荷役助力装置
6か月前
大栄産業株式会社
クランプ
6か月前
ユニパルス株式会社
荷役助力装置
5か月前
ユニパルス株式会社
荷役助力装置
7か月前
株式会社大林組
安全支援システム
3か月前
個人
垂直自動搬送機
3か月前
白山工業株式会社
バランサ
8か月前
個人
エアバック式レスキュー用品
2か月前
株式会社伊藤
滑り止め装置
4か月前
岐阜工業株式会社
運搬台車
1か月前
株式会社ユピテル
システム等
8か月前
個人
アウトリガー用転倒防止ベース
1か月前
株式会社キトー
タイヤ用吊具
7か月前
大和ハウス工業株式会社
吊上具
3か月前
新英運輸株式会社
自動車用台車
7か月前
株式会社キトー
コンテナ吊り具
14日前
株式会社豊田自動織機
フォークリフト
9か月前
フジテック株式会社
エレベータ
10か月前
株式会社豊田自動織機
フォークリフト
2か月前
続きを見る
他の特許を見る





 特許ウォッチ
特許ウォッチ