TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025144081
公報種別
公開特許公報(A)
公開日
2025-10-02
出願番号
2024043679
出願日
2024-03-19
発明の名称
計量装置
出願人
アンリツ株式会社
代理人
弁理士法人栄光事務所
主分類
G01G
7/04 20060101AFI20250925BHJP(測定;試験)
要約
【課題】物品の計量精度の向上を図った計量装置を提供する。
【解決手段】制御CPU62は、秤量用ベルトコンベア3が駆動し、P,I,Dの各パラメータKp,Ki,Kdが初期値に設定された状態で、PID制御部52を動作させたときに出力される秤量信号の時間波形を取得する。制御CPU62は、取得した秤量信号の時間波形に基づいてP,I,Dの各パラメータKp,Ki,Kdの少なくとも1つ以上を調整する。制御CPU62は、秤量用ベルトコンベア3に物品10を搬送させ、調整されたP,I,Dの各パラメータKp,Ki,Kdが設定された状態で、PID制御部52を動作させたときに出力される秤量信号に基づいて、物品10の重量を計測する。
【選択図】図2
特許請求の範囲
【請求項1】
重量が計量される物品(10)を搬送する秤量用コンベア(3)と、
前記秤量用コンベアに与えられる荷重によって変位する秤量台(511)と、
前記秤量台の変位を検出する変位センサ(512)と、
前記荷重に対抗する力を前記秤量台に与える電磁コイル(513)と、
前記変位センサから出力される変位信号をPID演算して、演算結果に応じて前記電磁コイルに流れる電流を制御するPID制御部(52)と、
前記電磁コイルに流れる電流に応じた秤量信号を出力する信号出力部(53)と、
前記秤量用コンベアが駆動し、P,I,Dの各パラメータが初期値に設定された状態で、前記PID制御部を動作させたときに出力される前記秤量信号の時間波形を取得する波形取得部(62)と、
前記波形取得部により取得した前記秤量信号の時間波形に基づいて前記P,I,Dの各パラメータの少なくとも1つ以上を調整する調整部(62)と、
前記秤量用コンベアに前記物品を搬送させ、前記調整部によって調整された前記P,I,Dの各パラメータが設定された状態で、前記PID制御部を動作させたときに出力される前記秤量信号に基づいて、前記物品の重量を計量する計量部(62)と、を備えた、
計量装置(1)。
続きを表示(約 660 文字)
【請求項2】
請求項1に記載の計量装置であって、
前記調整部は、前記波形取得部により取得した前記秤量信号の時間波形を入力とし、調整後の前記P,I,Dの各パラメータが出力として学習された学習モデルから構成される、
計量装置。
【請求項3】
請求項1に記載の計量装置であって、
前記波形取得部は、前記物品を前記秤量用コンベアで搬送した状態で、前記PID制御部を動作させたときに出力される前記秤量信号の時間波形を取得し、
前記調整部は、前記物品が前記秤量用コンベアに乗り移って前記秤量信号が立ち上がったときの立ち上がり波形に基づいて前記P,I,Dの各パラメータの少なくとも1つ以上を調整する、
計量装置。
【請求項4】
請求項1に記載の計量装置であって、
前記波形取得部は、前記物品を前記秤量用コンベアで搬送した状態で、前記PID制御部を動作させたときに出力される前記秤量信号の時間波形を取得し、
前記調整部は、前記物品が前記秤量用コンベアに乗り移って前記秤量信号が立ち上がった後の定常振動している定常波形に基づいて前記P,I,Dの各パラメータの少なくとも1以上を調整する、
計量装置。
【請求項5】
請求項1に記載の計量装置であって、
前記波形取得部は、前記物品を前記秤量用コンベアで搬送していない状態で、前記PID制御部を動作させたときに出力される前記秤量信号の時間波形を取得する、
計量装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、計量装置に関する。
続きを表示(約 2,600 文字)
【背景技術】
【0002】
従来、上述した計量装置として特許文献1に記載された電磁補償はかりが提案されている。上述した電磁補償はかりによれば、被計量物(物品)が搬送されている間、被計量物の荷重による秤量台の変位を電磁コイルの力で相殺し、この電磁コイルに流れる電流に基づいて被計量物の重量を計量している。電磁コイルに流れる電流は、秤量台の変位が一定位置でとどまるようにPID制御されている。
【0003】
上記PID制御においては、想定される使用状況において、P,I,Dの各パラメータが最適に設定され、応答性と安定性が得られるようになっている。しかしながら、例えば、実際の使用状況と想定される使用状況が大きく異なる場合には、P,I,Dの各パラメータが最適に設定されているとは言えず、物品の計量精度が悪くなる、という問題があった。
【先行技術文献】
【特許文献】
【0004】
特許第2706825号
【発明の概要】
【発明が解決しようとする課題】
【0005】
本発明は、上述した事情に鑑みてなされたものであり、その目的は、物品の計量精度の向上を図った計量装置を提供することにある。
【課題を解決するための手段】
【0006】
前述した目的を達成するために、本発明に係る計量装置は、下記[1]~[5]を特徴としている。
[1]
重量が計量される物品(10)を搬送する秤量用コンベア(3)と、
前記秤量用コンベアに与えられる荷重によって変位する秤量台(511)と、
前記秤量台の変位を検出する変位センサ(512)と、
前記荷重に対抗する力を前記秤量台に与える電磁コイル(513)と、
前記変位センサから出力される変位信号をPID演算して、演算結果に応じて前記電磁コイルに流れる電流を制御するPID制御部(52)と、
前記電磁コイルに流れる電流に応じた秤量信号を出力する信号出力部(53)と、
前記秤量用コンベアが駆動し、P,I,Dの各パラメータが初期値に設定された状態で、前記PID制御部を動作させたときに出力される前記秤量信号の時間波形を取得する波形取得部(62)と、
前記波形取得部により取得した前記秤量信号の時間波形に基づいて前記P,I,Dの各パラメータの少なくとも1つ以上を調整する調整部(62)と、
前記秤量用コンベアに前記物品を搬送させ、前記調整部によって調整された前記P,I,Dの各パラメータが設定された状態で、前記PID制御部を動作させたときに出力される前記秤量信号に基づいて、前記物品の重量を計量する計量部(62)と、を備えた、
計量装置(1)であること。
[2]
[1]に記載の計量装置であって、
前記調整部は、前記波形取得部により取得した前記秤量信号の時間波形を入力とし、調整後の前記P,I,Dの各パラメータが出力として学習された学習モデルから構成される、
計量装置であること。
[3]
[1]に記載の計量装置であって、
前記波形取得部は、前記物品を前記秤量用コンベアで搬送した状態で、前記PID制御部を動作させたときに出力される前記秤量信号の時間波形を取得し、
前記調整部は、前記物品が前記秤量用コンベアに乗り移って前記秤量信号が立ち上がったときの立ち上がり波形に基づいて前記P,I,Dの各パラメータの少なくとも1つ以上を調整する、
計量装置であること。
[4]
[1]に記載の計量装置であって、
前記波形取得部は、前記物品を前記秤量用コンベアで搬送した状態で、前記PID制御部を動作させたときに出力される前記秤量信号の時間波形を取得し、
前記調整部は、前記物品が前記秤量用コンベアに乗り移って前記秤量信号が立ち上がった後の定常振動している定常波形に基づいて前記P,I,Dの各パラメータの少なくとも1以上を調整する、
計量装置であること。
[5]
[1]に記載の計量装置であって、
前記波形取得部は、前記物品を前記秤量用コンベアで搬送していない状態で、前記PID制御部を動作させたときに出力される前記秤量信号の時間波形を取得する、
計量装置であること。
【0007】
上記[1]の構成によれば、調整部が、秤量信号の時間波形に基づいてP,I,Dの各パラメータの少なくとも1つ以上を調整する。これにより、物品の特性(重量、重心位置、内容物の不安定さ、コンベア接触面の硬度など)や搬送条件に対して、最も計量精度が良くなるパラメータを設定でき、物品の計量精度の向上を図ることができる。
上記[2]の構成によれば、学習モデルを用いることにより、より適切なパラメータを設定できる場合がある。
上記[3]の構成によれば、秤量信号の応答性向上を図ったパラメータを設定できる。
上記[4]の構成によれば、秤量信号の安定性向上を図ったパラメータを設定できる。
上記[5]の構成によれば、物品を搬送していない状態でもパラメータを設定できる。
【発明の効果】
【0008】
本発明に係る計量装置によれば、物品の計量精度の向上を図る、との効果を奏する。
【0009】
以上、本発明について簡潔に説明した。更に、以下に説明される発明を実施するための形態(以下、「実施形態」という。)を添付の図面を参照して通読することにより、本発明の詳細は更に明確化されるであろう。
【図面の簡単な説明】
【0010】
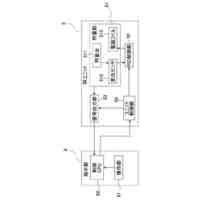
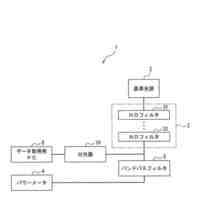
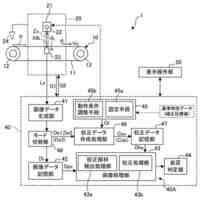
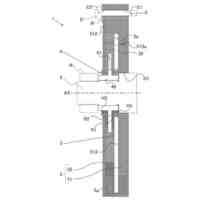
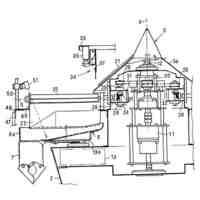
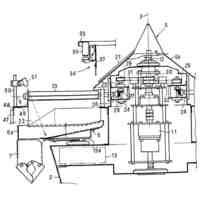
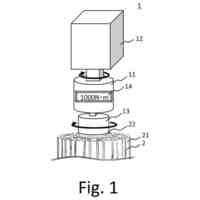
図1は、本発明の計量装置を組み込んだ重量選別機の一実施形態を示す概略図である。
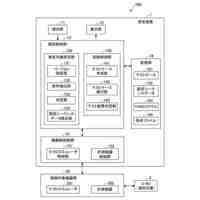
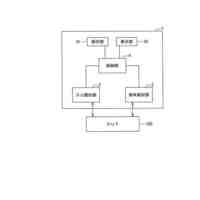
図2は、図1に示す秤ユニット及び指示部の詳細を示すブロック図である。
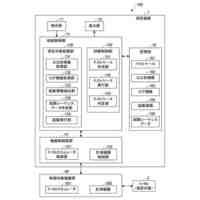
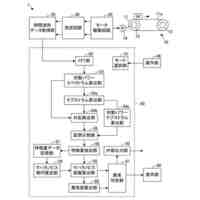
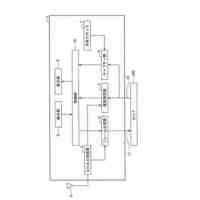
図3は、図2に示す制御CPUが実行するパラメータ設定処理手順を示すフローチャートである。
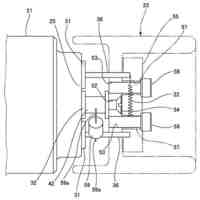
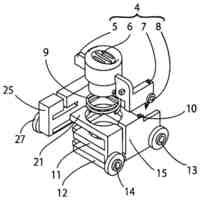
図4は、図3に示す調整について説明するための説明図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
アンリツ株式会社
計量装置
14日前
アンリツ株式会社
物品検査装置
6日前
アンリツ株式会社
測定システム
13日前
アンリツ株式会社
測定装置および測定方法
9日前
アンリツ株式会社
X線管及びX線検査装置
15日前
アンリツ株式会社
測定装置および測定方法
9日前
アンリツ株式会社
信号発生装置及び信号発生方法
7日前
アンリツ株式会社
分光器の校正装置及び校正方法
6日前
アンリツ株式会社
予知保全装置及び予知保全方法
13日前
アンリツ株式会社
真空管、X線管及びX線検査装置
15日前
アンリツ株式会社
物品検査装置およびその校正方法
6日前
アンリツ株式会社
誤り率測定装置及び信号検出方法
17日前
アンリツ株式会社
誤り率測定装置及び誤り率測定方法
7日前
アンリツ株式会社
ADC校正装置およびADC校正方法
17日前
アンリツ株式会社
測定装置と測定システムとその測定方法
9日前
アンリツ株式会社
ネットワーク測定装置とその遅延時間補正方法
6日前
アンリツ株式会社
信号発生装置および信号発生装置が実行する信号発生方法
7日前
個人
メジャー文具
9日前
個人
アクセサリー型テスター
2日前
個人
高精度同時多点測定装置
1日前
日本精機株式会社
位置検出装置
15日前
ユニパルス株式会社
ロードセル
8日前
日本精機株式会社
位置検出装置
15日前
日本精機株式会社
位置検出装置
15日前
大和製衡株式会社
組合せ秤
20日前
大和製衡株式会社
組合せ秤
20日前
アズビル株式会社
圧力センサ
14日前
株式会社ユーシン
操作検出装置
17日前
株式会社チノー
放射光測温装置
8日前
エイブリック株式会社
磁気センサ回路
14日前
トヨタ自動車株式会社
検査装置
17日前
トヨタ自動車株式会社
監視装置
7日前
株式会社ヨコオ
ソケット
8日前
株式会社東芝
センサ
20日前
ダイキン工業株式会社
監視装置
6日前
株式会社ヨコオ
ソケット
7日前
続きを見る
他の特許を見る






 特許ウォッチ
特許ウォッチ