TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025141413
公報種別
公開特許公報(A)
公開日
2025-09-29
出願番号
2024041331
出願日
2024-03-15
発明の名称
ニューマチックケーソン工事における遠隔掘削マルチタスクシステム
出願人
大豊建設株式会社
代理人
弁理士法人パテントボックス
主分類
E02D
23/04 20060101AFI20250919BHJP(水工;基礎;土砂の移送)
要約
【課題】オペレーションを効率よく間違いなく実施することのできる遠隔掘削マルチタスクシステムを提供する。
【解決手段】遠隔掘削マルチタスクシステムSは、複数の掘削機e
c
(20)、・・・に対してオペレータwを配置するための、ニューマチックケーソンの遠隔掘削マルチタスクシステムであって、掘削機e
c
(20)のオペレータwの作業可能日時と、各現場cの掘削作業計画と、作業可能日時と掘削作業計画とに基づいて、ニューマチックケーソン1の品質向上を図る目的関数を設定することによって、人員配置計画を作成する制御装置30と、を備えている。この目的関数として、掘削機e
c
(20)を担当するオペレータwの技量値と、要求される要求技量値と、の差分をすべての掘削機e
c
(20)とすべての現場について合計し、この合計値が最小となるように人員配置計画を作成することが好ましい。
【選択図】図2
特許請求の範囲
【請求項1】
複数の掘削機に対してオペレータを配置するための、ニューマチックケーソンの遠隔掘削マルチタスクシステムであって、
掘削機のオペレータの作業可能日時と、
各現場の掘削作業計画と、
前記作業可能日時と前記掘削作業計画とに基づいて、ニューマチックケーソンの品質向上を図る目的関数を設定することによって、人員配置計画を作成する制御装置と、
を備える、ニューマチックケーソンの遠隔掘削マルチタスクシステム。
続きを表示(約 1,700 文字)
【請求項2】
前記目的関数として、掘削機を担当するオペレータの技量値と、要求される要求技量値と、の差分をすべての掘削機とすべての現場について合計し、この合計値が最小となるように前記人員配置計画を作成する、請求項1に記載された、ニューマチックケーソンの遠隔掘削マルチタスクシステム。
【請求項3】
下記の数式(1)に基づいて前記人員配置計画を作成するようになっている、請求項2に記載された、ニューマチックケーソンの遠隔掘削マルチタスクシステム。
TIFF
2025141413000009.tif
19
131
ただし、数式(1)において、
W:オペレータの集合
C:現場cの集合
E
c
:現場での掘削機e
c
の集合
T:人員配置計画の対象となる期間(例えば、1ヶ月)を単位時間あたり(例えば、昼勤午前、昼勤午後、夜勤午前、夜勤午後の4分割)に分割した時間tの集合
a
w
:オペレータwの技量値
a
tce
:ある時間tの現場cの掘削機e
c
における要求技量値
x
tcew
:ある時間tにおいて現場cの掘削機e
c
にオペレータが割り当てられるとき1、
そうでないとき0
【請求項4】
前回の配置から移動が必要なオペレータの人数を計算するとともに、該人数に重み付けをすることで、ペナルティを課すように構成される、請求項3に記載された、ニューマチックケーソンの遠隔掘削マルチタスクシステム。
【請求項5】
オペレータの単位時間当りの費用をすべての掘削機について合計するとともに、該合計費用に重み付けをすることで、ペナルティを課すように構成される、請求項4に記載された、ニューマチックケーソンの遠隔掘削マルチタスクシステム。
【請求項6】
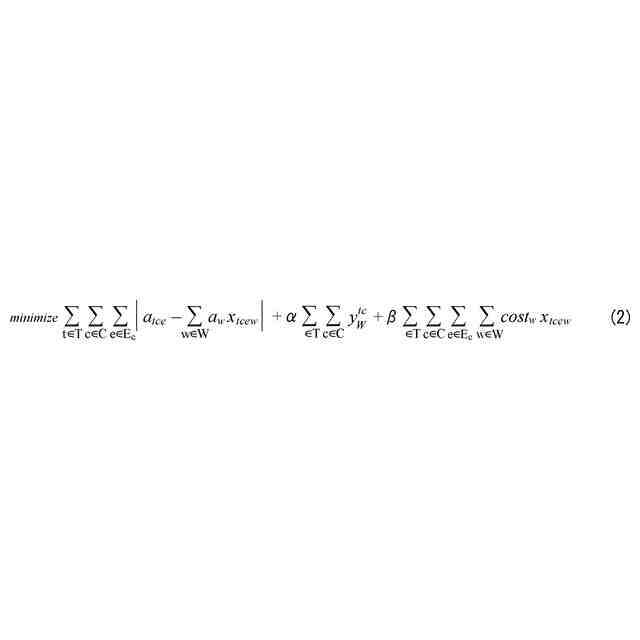
下記の数式(2)に基づいて前記人員配置計画を作成するようになっている、請求項5に記載された、ニューマチックケーソンの遠隔掘削マルチタスクシステム。
TIFF
2025141413000010.tif
21
157
ただし、数(2)において、
y
tc
W
:ある時間において現場の前回作業時の配置と異なるオペレータの人数
cost
w
:オペレータの単位時間あたりの費用
α,β:各項の重み
【請求項7】
前記目的関数として、掘削機を担当するオペレータの技量値と、要求される要求技量値の最大値と、の差分をすべての掘削機とすべての現場について合計し、この合計値が最小となるように前記人員配置計画を作成する、請求項1に記載された、ニューマチックケーソンの遠隔掘削マルチタスクシステム。
【請求項8】
下記の数式(4)に基づいて前記人員配置計画を作成するようになっている、請求項7に記載された、ニューマチックケーソンの遠隔掘削マルチタスクシステム。
TIFF
2025141413000011.tif
20
141
ただし、数(4)において、
W:オペレータの集合
C:現場cの集合
E
c
:現場での掘削機e
c
の集合
L:リフトlの集合
a
w
:オペレータwの技量値
a
max
cle
:現場cのリフトlの掘削作業期間における掘削機e
c
の要求技量値の最大値
x
main
clew
:現場cのリフトlの掘削作業期間において掘削機e
c
にオペレータが担当として割り当てられるとき1、そうでないとき0
発明の詳細な説明
【技術分野】
【0001】
本発明は、ニューマチックケーソン工事の掘削作業において、複数の現場に遠隔掘削のオペレータを配置するための遠隔掘削マルチタスクシステムに関するものである。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
従来から、ニューマチックケーソン工事の掘削作業において、各オペレータは、担当する対象現場でのみ掘削作業を実施しており、オペレータと掘削機が1対1で結びついている。すなわち、当該現場の必要作業時間や稼働対象掘削機に合わせて、各オペレータが掘削作業を実施している(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
特開2024-8370号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、オペレータと現場、さらには掘削機を自由に結び付けて遠隔で複数のケーソン掘削作業を効率的に稼働させるためには、各ケーソンにおける掘削作業時間、稼働掘削機台数とオペレータの作業可能時間を効率的に結び付けて行うことが必要である。
【0005】
そこで、本発明は、このようなオペレーションを効率よく間違いなく実施するためのシステムを提案するものである。
【課題を解決するための手段】
【0006】
前記目的を達成するために、本発明のニューマチックケーソンの遠隔掘削マルチタスクシステムは、掘削機のオペレータの作業可能日時と、各現場の掘削作業計画と、前記作業可能日時と前記掘削作業計画とに基づいて、ニューマチックケーソンの品質向上を図る目的関数を設定することによって、人員配置計画を作成する制御装置と、を備えている。
【発明の効果】
【0007】
このように、本発明のニューマチックケーソンの遠隔掘削マルチタスクシステムは、掘削機のオペレータの作業可能日時と、各現場の掘削作業計画と、作業可能日時と掘削作業計画とに基づいて、ニューマチックケーソンの品質向上を図る目的関数を設定することによって、人員配置計画を作成する制御装置と、を備えている。このような構成であれば、オペレーションを効率よく間違いなく実施するためのシステムとなる。
【図面の簡単な説明】
【0008】
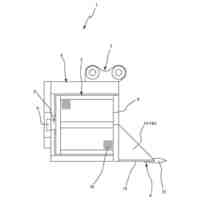
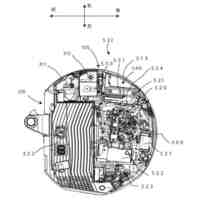
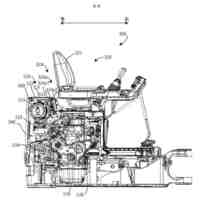
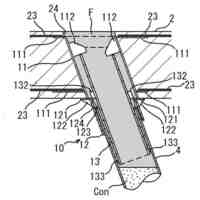
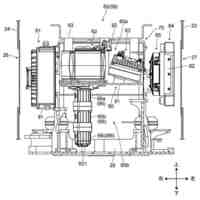
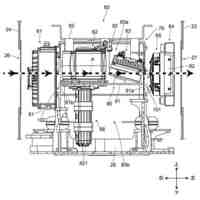
ニューマチックケーソンの全体構成を示す断面図である。
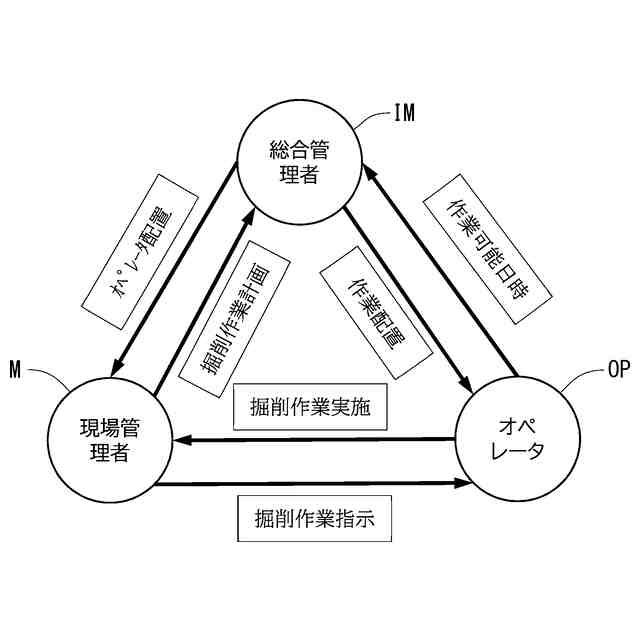
総合管理者と現場管理者とオペレータの関係を説明する説明図である。
遠隔操作マルチタスクシステムの構成を説明する説明図である。
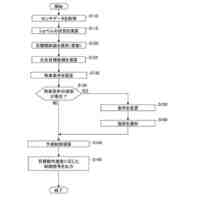
遠隔操作マルチタスクシステムの流れを説明するフロー図である。
オペレータの作業可能時間の入力例である。
掘削作業計画(現場A、B、C)の例である。
案Bの担当オペレータの決定による人員配置計画のステップ図である。
各種情報の修正に伴う人員配置計画の更新のステップ図である。
担当オペレータの決定による人員配置計画の例である。
現場作業のフロー図である。
【発明を実施するための形態】
【0009】
以下、本発明の実施の形態について図面を参照して説明する。ただし、以下の実施例に記載されている構成要素は例示であり、本発明の技術範囲をそれらのみに限定する趣旨のものではない。
【実施例】
【0010】
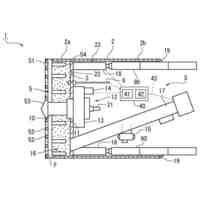
(ニューマチックケーソンの構成)
まず、図1を用いて、ニューマチックケーソン1の全体構成について説明する。図1に示すように、ニューマチックケーソン1の下部には、側壁11の下方に先端が細くなった刃口12が形成されており、この刃口12の内面と作業室スラブ14の下面と(さらに、地盤と)に囲まれて作業室13が形成されている。作業室13内には、少なくとも1台以上の掘削機20が配置されており、遠隔操作される掘削機20によって地盤を掘削してニューマチックケーソン1を沈下させていくようになっている。そして、掘削機20によって掘削された土砂は、アースバケット22を用いて搬出される。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
大豊建設株式会社
管理土圧の設定システム
7日前
大豊建設株式会社
管理土圧の逐次更新システム
2か月前
個人
バケット
1か月前
個人
建物の不同沈下の修正方法
1か月前
鹿島建設株式会社
接続方法
14日前
千代田工営株式会社
回転貫入杭
1か月前
株式会社大林組
操縦装置
1か月前
株式会社富田製作所
継手部構造
1か月前
ウエダ産業株式会社
アタッチメント
5日前
株式会社熊谷組
山留壁用親杭
1か月前
株式会社郷土開発
傾斜地の切土工法
13日前
日立建機株式会社
作業車両
1か月前
日立建機株式会社
作業機械
26日前
日本車輌製造株式会社
建設機械
1か月前
日立建機株式会社
建設機械
27日前
日立建機株式会社
作業機械
1か月前
日立建機株式会社
建設機械
今日
ヤンマーホールディングス株式会社
作業機械
1か月前
ヤンマーホールディングス株式会社
作業機械
1か月前
株式会社クボタ
作業機
13日前
FKS株式会社
擁壁及び擁壁の築造方法
1か月前
鹿島建設株式会社
接続方法および接続構造
1か月前
株式会社三誠
建物の免震構造
1か月前
株式会社次世代一次産業実践所
登山道の施工装置
1か月前
株式会社竹内製作所
作業用車両
1か月前
株式会社竹内製作所
作業用車両
1か月前
株式会社竹内製作所
作業用車両
1か月前
山形新興株式会社
建築物の基礎及び基礎成形型
1か月前
ナブテスコ株式会社
ドーザブレード駆動機構
26日前
個人
アンカーボルト支持装置
1か月前
日本車輌製造株式会社
杭打機の制御システム
1か月前
日本車輌製造株式会社
杭打機の表示システム
29日前
日立建機株式会社
作業機械
1か月前
日立建機株式会社
作業機械
1か月前
日本車輌製造株式会社
建設機械の電源システム
1か月前
株式会社大林組
施工支援装置及び施工支援方法
1か月前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ