TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025140195
公報種別
公開特許公報(A)
公開日
2025-09-29
出願番号
2024039406
出願日
2024-03-13
発明の名称
管理サーバ、ロボット管理システム及びロボット管理方法
出願人
横河電機株式会社
代理人
弁理士法人酒井国際特許事務所
主分類
G05D
1/225 20240101AFI20250919BHJP(制御;調整)
要約
【課題】機種が互いに異なる複数のロボット間での点検作業の引き継ぎを容易に行うこと。
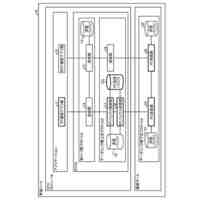
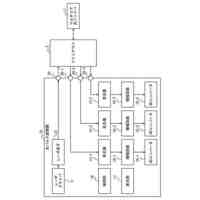
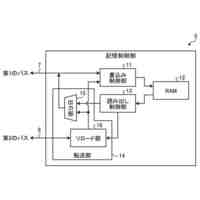
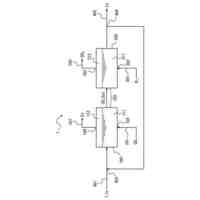
【解決手段】管理サーバ10は、ロボットアダプタモジュール13を有し、機種が互いに異なるロボットを含む第一ロボット20-1,第二ロボット20-2,…,第Nロボット20-Nを管理し、ロボットアダプタモジュール13は、点検作業の作業情報データを第一ロボット20-1,第二ロボット20-2,…,第Nロボット20-Nのそれぞれの機種に応じた特定の形式の命令に変換し、点検作業を行うロボットの機種に応じた特定の形式に変換後の命令を第一ロボット20-1,第二ロボット20-2,…,第Nロボット20-Nのうち点検作業を行うロボットへ送信する。
【選択図】図2
特許請求の範囲
【請求項1】
機種が互いに異なるロボットを含む複数のロボットを管理する管理サーバであって、
点検作業の作業情報データを前記複数のロボットのそれぞれの機種に応じた特定の形式の命令に変換し、前記点検作業を行うロボットの機種に応じた前記特定の形式に変換後の前記命令を前記複数のロボットのうち前記点検作業を行うロボットへ送信するアダプタ、
を具備する管理サーバ。
続きを表示(約 1,300 文字)
【請求項2】
前記作業情報データは、前記点検作業の点検名と、前記点検作業の進捗状態と、前記点検作業を行うロボットの機種と、前記点検作業を行うロボットの名称とを含み、
前記アダプタは、前記作業情報データに示された前記機種に基づいて、前記作業情報データを前記特定の形式の命令に変換する、
請求項1に記載の管理サーバ。
【請求項3】
プラント内での前記点検作業の条件を満足する単一のロボットを前記複数のロボットの中から選択し、選択した前記単一のロボットに対する前記作業情報データを生成するプロセッサ、
をさらに具備する請求項1に記載の管理サーバ。
【請求項4】
前記プロセッサは、点検対象の点検に必要な装備と、前記点検作業の際の移動場所とを前記条件に含めて前記単一のロボットを選択する、
請求項3に記載の管理サーバ。
【請求項5】
前記点検対象と、前記必要な装備と、前記移動場所とが互いに対応付けられて設定された点検情報を記憶する記憶部、をさらに具備し、
前記プロセッサは、前記点検情報を用いて前記単一のロボットを選択する、
請求項4に記載の管理サーバ。
【請求項6】
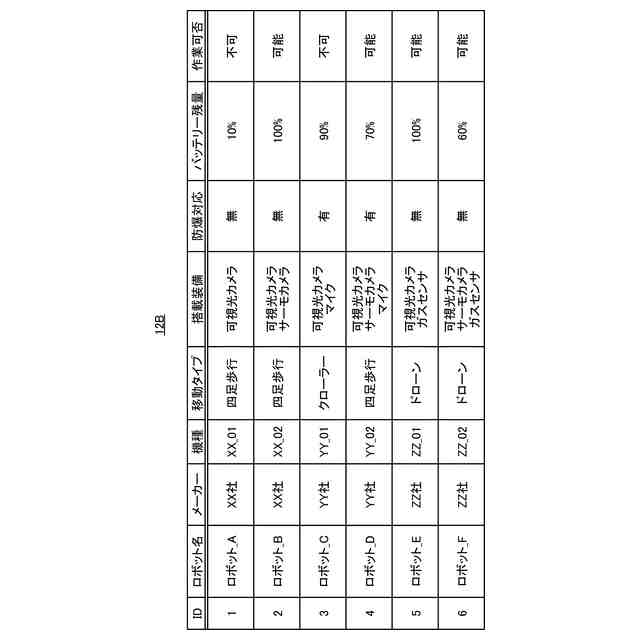
前記複数のロボットの各々の機種と、前記複数のロボットの各々の移動タイプと、前記複数のロボットの各々の搭載装備とが互いに対応付けられて設定されたロボット情報を記憶する記憶部、をさらに具備し、
前記プロセッサは、前記ロボット情報を用いて前記単一のロボットを選択する、
請求項3に記載の管理サーバ。
【請求項7】
前記プロセッサは、前記単一のロボットによる前記点検作業が中断したときに、前記点検作業の引継ぎ先のロボットを前記点検作業の進捗状態に応じた前記条件に基づいて前記複数のロボットの中から選択する、
請求項3に記載の管理サーバ。
【請求項8】
前記プロセッサは、前記点検作業を行うことを前記管理サーバへ指示するIAシステムへ前記点検作業の進捗状態を報告する、
請求項3に記載の管理サーバ。
【請求項9】
機種が互いに異なるロボットを含む複数のロボットと、
点検作業の作業情報データを前記複数のロボットのそれぞれの機種に応じた特定の形式の命令に変換し、前記点検作業を行うロボットの機種に応じた前記特定の形式に変換後の前記命令を前記複数のロボットのうち前記点検作業を行うロボットへ送信するアダプタを有する管理サーバと、
を具備するロボット管理システム。
【請求項10】
機種が互いに異なるロボットを含む複数のロボットと通信可能な管理サーバが有するアダプタが、
点検作業の作業情報データを前記複数のロボットのそれぞれの機種に応じた特定の形式の命令に変換し、
前記点検作業を行うロボットの機種に応じた前記特定の形式に変換後の前記命令を前記複数のロボットのうち前記点検作業を行うロボットへ送信することにより前記複数のロボットを管理する、
ロボット管理方法。
発明の詳細な説明
【技術分野】
【0001】
本開示は、管理サーバ、ロボット管理システム及びロボット管理方法に関する。
続きを表示(約 1,200 文字)
【背景技術】
【0002】
プラントにおいて、人手不足の解消や安全性の向上を図るために、ロボットの活用が進んでいる。例えば、プラント内の巡回点検を人間の代わりにロボットに行わせることができる。
【先行技術文献】
【特許文献】
【0003】
特開2007-249801号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
プラント内での点検作業を行うロボットが複数存在する場合、機種が互いに異なる複数のロボットが混在する可能性がある。機種が互いに異なる複数のロボット間では、各々のロボットを管理するシステムも互いに相違する場合がある。また、機種が互いに異なる各々のロボットを管理する複数のシステム間をつなぐAPI(Application Programming Interface)は、ほとんど提供されていない。
【0005】
よって、機種が互いに異なる複数のロボット間で点検作業の引き継ぎを行うことが困難であった。
【0006】
そこで、本開示では、機種が互いに異なる複数のロボット間での点検作業の引き継ぎを容易に行うことができる技術を提案する。
【課題を解決するための手段】
【0007】
本開示の管理サーバは、アダプタを有し、機種が互いに異なるロボットを含む複数のロボットを管理する。前記アダプタは、点検作業の作業情報データを前記複数のロボットのそれぞれの機種に応じた特定の形式の命令に変換し、前記点検作業を行うロボットの機種に応じた前記特定の形式に変換後の前記命令を前記複数のロボットのうち前記点検作業を行うロボットへ送信する。
【発明の効果】
【0008】
本開示によれば、機種が互いに異なる複数のロボット間での点検作業の引き継ぎを容易に行うことができる。
【図面の簡単な説明】
【0009】
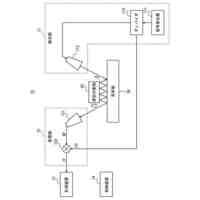
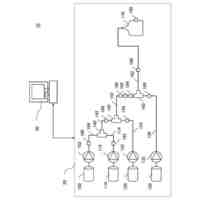
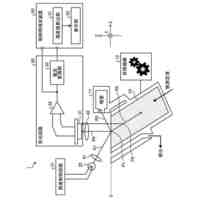
本開示の実施例1に係るロボット管理システムの構成例を示す図
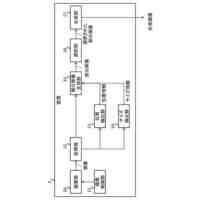
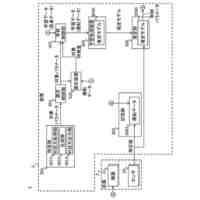
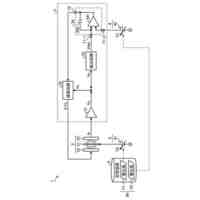
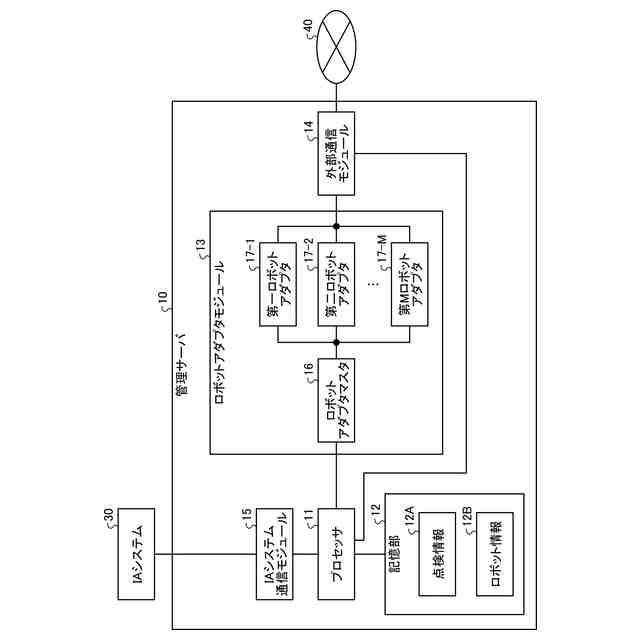
本開示の実施例1に係る管理サーバの構成例を示す図
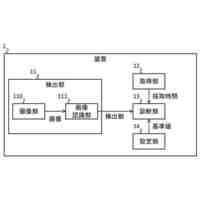
本開示の実施例1に係る点検情報の一例を示す図
本開示の実施例1に係るロボット情報の一例を示す図
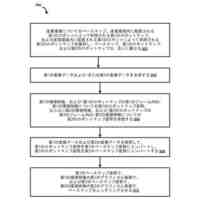
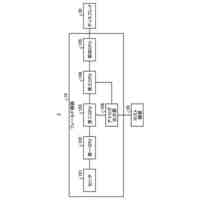
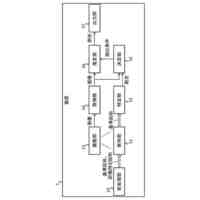
本開示の実施例1に係るロボット管理システムの処理手順の一例を示す図
本開示の実施例1に係るロボット管理システムの動作例を示す図
本開示の実施例1に係るロボット管理システムの動作例を示す図
本開示の実施例1に係るロボット管理システムの動作例を示す図
本開示の実施例1に係るロボット管理システムの動作例を示す図
【発明を実施するための形態】
【0010】
以下に、本開示の実施例を図面に基づいて説明する。なお、以下の実施例において、同一の部位または同一の処理には同一の符号を付すことにより重複する説明を省略することがある。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
横河電機株式会社
測定器
13日前
横河電機株式会社
コントローラ
2日前
横河電機株式会社
厚さ測定装置
2か月前
横河電機株式会社
藻類培養装置
23日前
横河電機株式会社
温度測定装置
13日前
横河電機株式会社
情報プログラム
2日前
横河電機株式会社
測定装置及び測定方法
10日前
横河電機株式会社
ベースマップの注釈付け
1か月前
横河電機株式会社
測定装置および測定方法
1か月前
横河電機株式会社
装置、方法及びプログラム
13日前
横河電機株式会社
研磨用治具および研磨方法
23日前
横河電機株式会社
測定方法及び測定システム
13日前
横河電機株式会社
光パルス試験器及び測定方法
9日前
横河電機株式会社
装置、方法およびプログラム
24日前
横河電機株式会社
装置、方法およびプログラム
1か月前
横河電機株式会社
フィールド機器及び診断方法
9日前
横河電機株式会社
測定装置および推定システム
1か月前
横河電機株式会社
装置、方法およびプログラム
23日前
横河電機株式会社
装置、方法およびプログラム
3日前
横河電機株式会社
測定装置および回転検出方法
1か月前
横河電機株式会社
水処理システム及び水処理方法
1か月前
横河電機株式会社
装置、方法、およびプログラム
3日前
横河電機株式会社
情報処理装置及び情報処理方法
1か月前
横河電機株式会社
装置、方法、およびプログラム
10日前
横河電機株式会社
装置、方法、およびプログラム
23日前
横河電機株式会社
菌体培養槽および菌体培養方法
11日前
横河電機株式会社
蛍光読取装置および蛍光読取方法
11日前
横河電機株式会社
分散制御ノード(DCN)冗長性
9日前
横河電機株式会社
制御プログラム及びコントローラ
2日前
横河電機株式会社
細胞穿刺装置及び顕微鏡システム
2日前
横河電機株式会社
細胞穿刺装置及び顕微鏡システム
2日前
横河電機株式会社
メタン生成装置及びメタン生成方法
13日前
横河電機株式会社
センサ装置、調整方法及び調整装置
1か月前
横河電機株式会社
表面散乱型濁度計及び濁度測定方法
11日前
横河電機株式会社
解析装置、訓練装置およびプログラム
11日前
横河電機株式会社
測定装置、測定方法、及びプログラム
16日前
続きを見る
他の特許を見る







 特許ウォッチ
特許ウォッチ