TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025142466
公報種別
公開特許公報(A)
公開日
2025-10-01
出願番号
2024041827
出願日
2024-03-18
発明の名称
解析装置、訓練装置およびプログラム
出願人
横河電機株式会社
代理人
弁理士法人RYUKA国際特許事務所
主分類
A01K
29/00 20060101AFI20250924BHJP(農業;林業;畜産;狩猟;捕獲;漁業)
要約
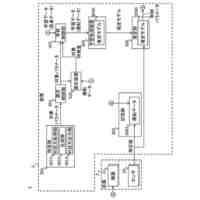
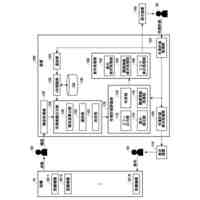
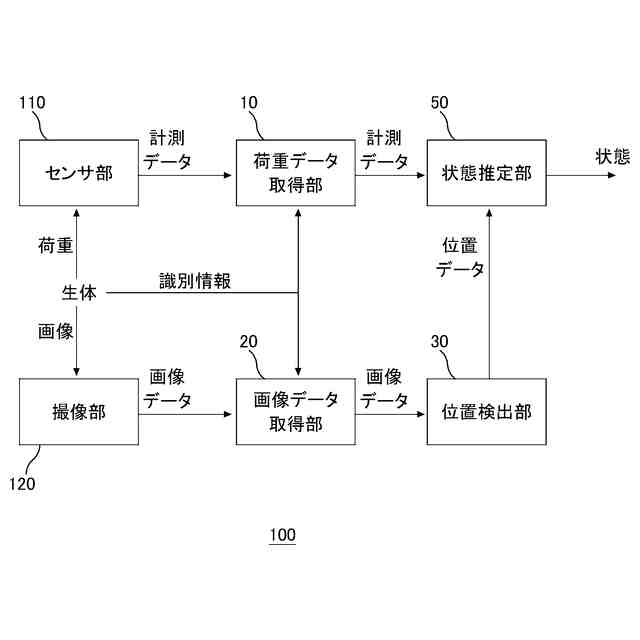
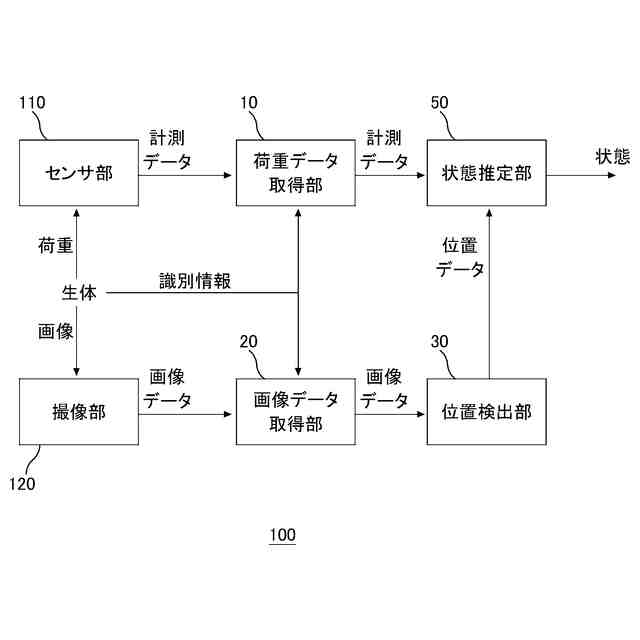
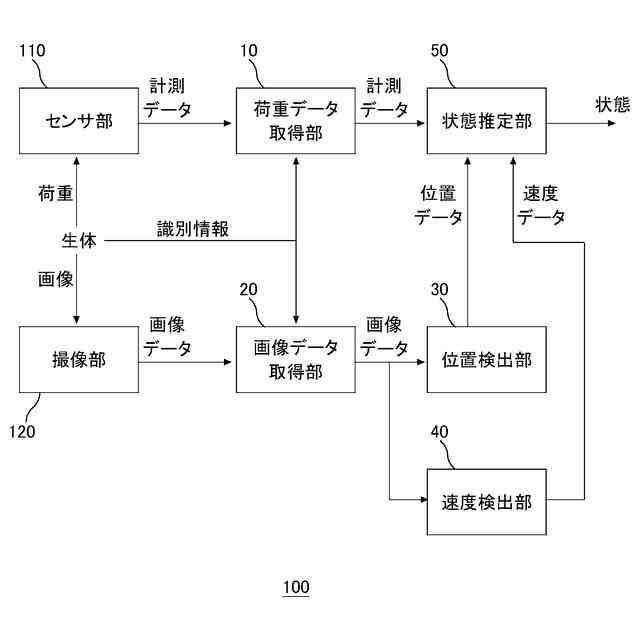
【解決手段】生体が歩行する経路に配置された、荷重を計測する複数のセンサ部材における計測データを、各個体の識別情報と対応付けて取得する荷重データ取得部と、前記経路を歩行する前記生体を撮像した画像を前記識別情報とともに取得する画像データ取得部と、前記画像に基づいて、前記生体の各脚が、前記複数のセンサ部材のうちのいずれのセンサ部材を押圧したかを示す位置データを生成する位置検出部と、前記計測データおよび前記位置データに基づいて、前記生体の状態を推定する状態推定部とを備える解析装置を提供する。
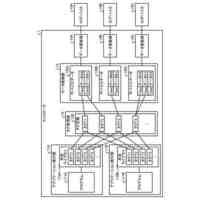
【選択図】図1
特許請求の範囲
【請求項1】
生体が歩行する経路に配置された、荷重を計測する複数のセンサ部材における計測データを、前記生体の各個体の識別情報と対応付けて取得する荷重データ取得部と、
前記経路における前記生体を撮像した画像を前記識別情報とともに取得する画像データ取得部と、
前記画像に基づいて、前記生体の各脚が、前記複数のセンサ部材のうちのいずれのセンサ部材を押圧したかを示す位置データを生成する位置検出部と、
前記計測データおよび前記位置データに基づいて、前記生体の状態を推定する状態推定部と
を備える解析装置。
続きを表示(約 1,100 文字)
【請求項2】
前記位置検出部は、前記生体のいずれかの脚の接地部分が、2つ以上の前記センサ部材に跨っているか否かを判定し、
前記状態推定部は、前記接地部分が2つ以上の前記センサ部材に跨っている場合に、当該2つ以上の前記センサ部材における荷重の計測値に基づいて、当該接地部分の荷重の計測値を算出し、前記接地部分が2つ以上の前記センサ部材に跨っていない場合に、当該1つの前記センサ部材における荷重の計測値に基づいて、当該接地部分の荷重の計測値を算出する、
請求項1に記載の解析装置。
【請求項3】
前記複数のセンサ部材におけるそれぞれのセンサ部材は、押圧面を有する板形状である
請求項1に記載の解析装置。
【請求項4】
前記複数のセンサ部材におけるそれぞれのセンサ部材は、押圧面を有する板形状であり、
それぞれの前記センサ部材は、前記押圧面における荷重の分布を計測し、
前記状態推定部は、前記生体の各脚の接地部分における荷重の分布に基づいて、前記生体の状態を推定する
請求項1に記載の解析装置。
【請求項5】
前記画像に基づいて、前記生体の移動速度を検出する速度検出部を更に備え、
前記状態推定部は、前記生体の移動速度に更に基づいて、前記生体の状態を推定する
請求項1に記載の解析装置。
【請求項6】
生体が歩行する経路に配置され、前記生体の各脚の接地部分における荷重の分布を計測するセンサ部材における計測データを、前記生体の各個体の識別情報と対応付けて取得する荷重データ取得部と、
前記生体の各脚の前記接地部分における荷重の分布に基づいて、前記生体の状態を推定する状態推定部と
を備える解析装置。
【請求項7】
前記状態推定部は、前記生体の蹄病の種類を推定する
請求項6に記載の解析装置。
【請求項8】
前記状態推定部は、前記各脚における荷重の不均一性、同一個体の過去の前記計測データに対する相違、および、他の個体の前記計測データに対する相違の少なくとも1つの特徴量に基づいて、前記生体の状態を推定する
請求項1または6に記載の解析装置。
【請求項9】
前記計測データに基づいて、前記生体の体重を算出する体重算出部を更に備える
請求項1または6に記載の解析装置。
【請求項10】
前記状態推定部は、前記生体が歩行しているか、または、静止しているかの推定結果に基づいて、前記生体の状態を推定するための推定方法を選択する
請求項1または6に記載の解析装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、解析装置、訓練装置およびプログラムに関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
特許文献1には、「撮像画像中における乳牛の特定の部位の動きを捕捉して、この特定の部位の動きに基づいて、撮像した乳牛の蹄の状態を診断するようにしたことにより、蹄の状態を客観的に診断する(要約書)」技術が開示されている。特許文献2には、「牛の距離画像から抽出された当該牛の3次元形状を示す3次元座標群」に基づいて、「牛の健康状態を示すスコアを算出する(要約書)」技術が開示されている。非特許文献1には、牛の跛行の早期発見に関する技術が開示されている。
特許文献1 特開2005-253435号公報
特許文献2 国際公開第2017/187719号
非特許文献1 A. Van Nuffel, et al "Exploration of measurement variation of gait variables for early lameness detection in cattle using the GAITWISE" Livestock Science, Volume 156, Issues 1-3, September 2013, Pages 88-95.
【発明の概要】
【0003】
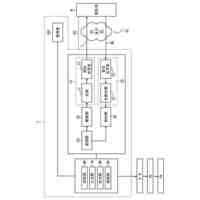
本発明の第1の態様においては、解析装置を提供する。上記解析装置は、生体が歩行する経路に配置された、荷重を計測する複数のセンサ部材における計測データを、各個体の識別情報と対応付けて取得する荷重データ取得部を備えてよい。上記何れかの解析装置は、前記経路における前記生体を撮像した画像を前記識別情報とともに取得する画像データ取得部を備えてよい。上記何れかの解析装置は、前記画像に基づいて、前記生体の各脚が、前記複数のセンサ部材のうちのいずれのセンサ部材を押圧したかを示す位置データを生成する位置検出部を備えてよい。上記何れかの解析装置は、前記計測データおよび前記位置データに基づいて、前記生体の状態を推定する状態推定部を備えてよい。
【0004】
上記何れかの解析装置において前記位置検出部は、前記生体のいずれかの脚の接地部分が、2つ以上の前記センサ部材に跨っているか否かを判定してよい。上記何れかの解析装置において前記状態推定部は、前記接地部分が2つ以上の前記センサ部材に跨っている場合に、当該2つ以上の前記センサ部材における荷重の計測値に基づいて、当該接地部分の荷重の計測値を算出してよい。
【0005】
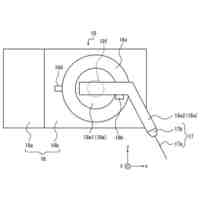
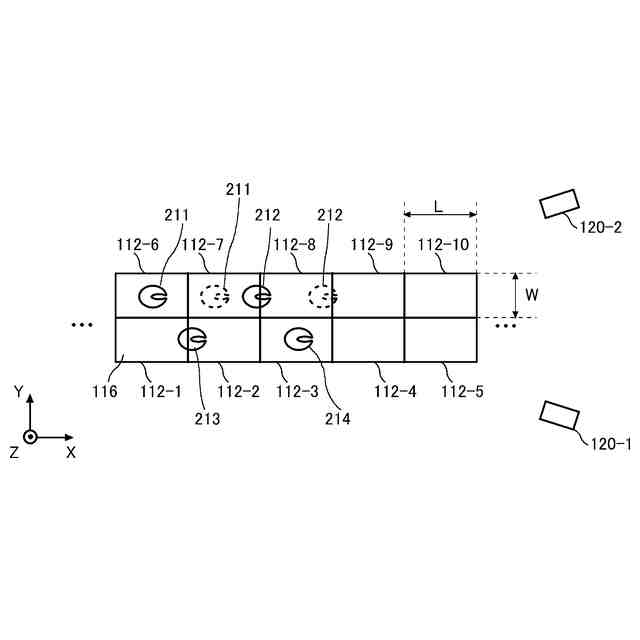
上記何れかの解析装置において前記複数のセンサ部材におけるそれぞれのセンサ部材は、押圧面を有する板形状であってよい。上記何れかの解析装置においてそれぞれの前記センサ部材の前記押圧面の長さおよび幅は、20cm以上、50cm以下であってよい。
【0006】
上記何れかの解析装置において前記複数のセンサ部材におけるそれぞれのセンサ部材は、押圧面を有する板形状であってよい。上記何れかの解析装置においてそれぞれの前記センサ部材は、前記押圧面における荷重の分布を計測してよい。上記何れかの解析装置において前記状態推定部は、前記生体の各脚の接地部分における荷重の分布に基づいて、前記生体の状態を推定してよい。
【0007】
上記何れかの解析装置は、前記画像に基づいて、前記生体の移動速度を検出する速度検出部を備えてよい。上記何れかの解析装置において前記状態推定部は、前記生体の移動速度に更に基づいて、前記生体の状態を推定してよい。
【0008】
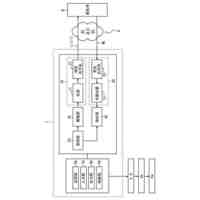
本発明の第2の態様においては、解析装置を提供する。上記解析装置は、生体が歩行する経路に配置され、前記生体の各脚の接地部分における荷重の分布を計測するセンサ部材における計測データを、各個体の識別情報と対応付けて取得する荷重データ取得部を備えてよい。上記何れかの解析装置は、前記生体の各脚の前記接地部分における荷重の分布に基づいて、前記生体の状態を推定する状態推定部を備えてよい。
【0009】
上記何れかの解析装置において前記状態推定部は、前記生体の蹄病の種類を推定してよい。
【0010】
上記何れかの解析装置において前記状態推定部は、前記各脚における荷重の不均一性、同一個体の過去の前記計測データに対する相違、および、他の個体の前記計測データに対する相違の少なくとも1つの特徴量に基づいて、前記生体の状態を推定してよい。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
横河電機株式会社
磁気コア
4日前
横河電機株式会社
コントローラ
18日前
横河電機株式会社
情報プログラム
18日前
横河電機株式会社
適応方法及び情報処理装置
11日前
横河電機株式会社
装置、方法およびプログラム
19日前
横河電機株式会社
光パルス試験器及び測定方法
25日前
横河電機株式会社
フィールド機器及び診断方法
25日前
横河電機株式会社
装置、方法、およびプログラム
19日前
横河電機株式会社
分散制御ノード(DCN)冗長性
25日前
横河電機株式会社
制御プログラム及びコントローラ
18日前
横河電機株式会社
細胞穿刺装置及び顕微鏡システム
18日前
横河電機株式会社
細胞穿刺装置及び顕微鏡システム
18日前
横河電機株式会社
測定装置、測定方法、及びプログラム
26日前
横河電機株式会社
測定装置、測定方法、及びプログラム
18日前
横河電機株式会社
測定装置、測定方法、及びプログラム
26日前
横河電機株式会社
メタン製造システム及びメタン製造方法
19日前
横河電機株式会社
情報処理装置、更新方法及び更新プログラム
26日前
横河電機株式会社
データ管理支援装置及びデータ管理支援方法
18日前
横河電機株式会社
情報処理装置、情報処理方法及びプログラム
25日前
横河電機株式会社
支援システム、支援方法および支援プログラム
20日前
横河電機株式会社
センサ装置、端末装置、及び、センサシステム
21日前
横河電機株式会社
回路モジュール、細胞穿刺装置、及び顕微鏡システム
18日前
横河電機株式会社
測定値算出方法、測定値算出プログラム、及び測定値算出装置
26日前
横河電機株式会社
アラーム管理装置、アラーム管理方法およびアラーム管理プログラム
26日前
横河電機株式会社
固体電解質組成物、固体電解質膜、積層体、電池、固体電解質組成物の製造方法
4日前
横河電機株式会社
光スペクトル測定プログラム、光スペクトル測定方法、及び光スペクトラムアナライザ
18日前
横河電機株式会社
設備を保守するための装置、方法、およびプログラム
今日
個人
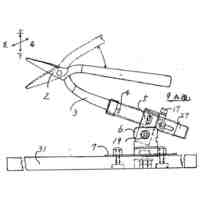
草刈り鋏
11日前
個人
蠅捕獲器
7日前
個人
刈込鋏保持具
25日前
個人
種子の製造方法
4日前
個人
草刈機用回転刃
7日前
株式会社丹勝
緑化工法
26日前
個人
昆虫捕集器
4日前
井関農機株式会社
作業車両
19日前
井関農機株式会社
作業車両
19日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ