TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025138848
公報種別
公開特許公報(A)
公開日
2025-09-25
出願番号
2025113804,2021069994
出願日
2025-07-04,2021-04-16
発明の名称
食品盛り付け方法、ハンド装置、食品盛り付け装置、食品盛り付け制御装置
出願人
株式会社日本キャリア工業
代理人
主分類
B25J
13/00 20060101AFI20250917BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】食品の盛り付けを好適に行える食品盛り付け方法、ハンド装置、食品盛り付け装置、食品盛り付け制御装置を提供する。
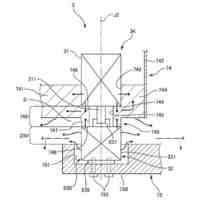
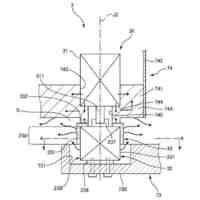
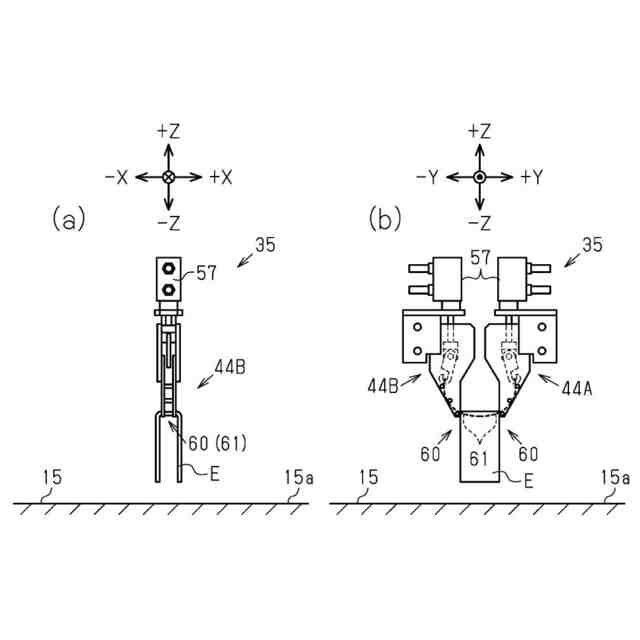
【解決手段】ロボットアームの先端に装着可能に設けられたハンド装置は、採取部35を有し、採取部35は、相互に接近する閉位置と、相互に離間する開位置との間を移動自在に設けられた複数の指部44A、44Bと、指部44A、44Bを開位置及び閉位置に往復駆動するエアシリンダを有する。採取部35は、各指部44Bに設けられて、相互に接近する進出位置と、相互に離間した退出位置間を移動自在に設けられた爪部60を有する。採取部35は、各指部44A、44Bが閉位置に位置する際に、各爪部60を進出位置に移動させ、各指部44A、44Bが開位置に位置する際に、各爪部60を退出位置へ作動させるエアシリンダ57を備える。
【選択図】図14
特許請求の範囲
【請求項1】
ロボットアームの先端に装着可能に設けられるとともに採取部を有するハンド装置であって、
前記採取部が、
開状態及び閉状態の移行が可能に設けられた複数の指部と、
前記指部の前記開状態及び前記閉状態の移行を行わせる指部駆動源と、
前記複数の指部の間に進入および退避自在に配置されるとともに、食品を斜め上方に掬い上げ、該掬い上げた前記食品を前記斜め上方とは逆方向に降ろすように作動する掬い上げ部と、
前記掬い上げ部を作動させる第1駆動源と、
前記掬い上げ部を前記複数の指部の間への進入および退避の作動させる第2駆動源と、を備えたハンド装置。
続きを表示(約 2,800 文字)
【請求項2】
ロボットアームの先端に装着可能に設けられるとともに採取部を有するハンド装置であって、
前記採取部が、
開状態及び閉状態の移行が可能に設けられた複数の指部と、
前記指部の前記開状態及び前記閉状態の移行を行わせる指部駆動源と、
各指部に設けられ、相互に近接する進出位置及び離間する退出位置へ移動自在に設けられた爪部と、
前記各爪部を前記進出位置及び前記退出位置の間で往復駆動する爪部駆動源と、
前記指部の開状態において前記進出位置に位置した各爪部の間に形成される間隙に進入自在に配置されるとともに、食品を斜め上方に掬い上げ、掬い上げた食品を斜め下方に降ろす掬い上げ部と、
前記掬い上げ部を前記斜め上方及び斜め下方へ作動させる第1駆動源と、
前記掬い上げ部の前記間隙への進入および退避の作動を行う第2駆動源と、を備え、
前記指部が開状態で、かつ、前記各爪部が前記進出位置に位置している状態で、前記掬い上げ部が前記食品を斜め上方に掬い上げた後、前記指部を閉状態へ移行させることによって前記食品の下部を前記各爪部に載せて支持し、前記ハンド装置の移動によって前記食品を前記盛り付け領域上の位置まで移動させた後に、前記各爪部を退出位置へ移動させて該各爪部による前記食品の支持を解除する構成としたハンド装置。
【請求項3】
複数の自由度を有するロボットアームの先端に請求項1に記載のハンド装置を備えるロボットを含む食品盛り付け装置であって、
前記ロボットアームは、前記ハンド装置を、食品が位置する採取位置から離間した待機位置から、前記採取位置に移動させ、
前記掬い上げ部は、前記ハンド装置が前記採取位置に移動する際に前記第2駆動源により開状態の指部の間に進入するとともに、前記第1駆動源により前記採取位置に位置する前記食品を斜め上方へ掬い上げる構成とし、
前記指部は、前記開状態で、該指部の間への前記掬い上げ部の進入と、前記食品の掬い上げ作動を許容するとともに、前記指部駆動源による前記閉状態への移行によって、前記掬い上げられた前記食品を平面視で略U字状に変形させる構成とし、
前記ロボットアームは、前記食品が変形された後に、前記採取位置から離間した盛り付け領域上に該ハンド装置を移動させる構成とし、
前記指部は、前記ロボットアームによって前記ハンド装置が前記盛り付け領域上に移動した後、前記指部駆動源により、開状態に移行して前記指部による前記食品の支持を解除する構成とし、
前記掬い上げ部は、前記第1駆動源により、支持が解除された前記食品を斜め下方に降ろして、前記盛り付け領域上に該平面視で略U字状のままで載置する構成とした食品盛り付け装置。
【請求項4】
複数の自由度を有するロボットアームの先端に請求項2に記載のハンド装置を備えるロボットを含む食品盛り付け装置であって、
前記ロボットアームは、前記ハンド装置を、食品が位置する採取位置から離間した待機位置から、前記採取位置に移動させ、
前記掬い上げ部は、前記ハンド装置が前記採取位置に移動する際に前記第2駆動源により前記指部が開状態または閉状態で、かつ、前記爪部が進出位置に位置しているときの前記間隙に進入し、前記採取位置に位置する食品を前記第1駆動源により斜め上方へ掬い上げる構成とし、
前記指部が、前記指部駆動源により前記閉状態に移動することで前記掬い上げられた食品を平面視で略U字状に変形させるとともに、前記進出位置に位置した爪部で前記掬い上げられた前記食品を支持し、
前記ロボットアームは、前記食品が前記爪部にて支持された後に、前記採取位置から離間した盛り付け領域上に該ハンド装置を移動させ、
前記爪部は、前記ハンド装置が前記盛り付け領域上に移動する際、前記爪部駆動源により、前記退出位置に移動することにより前記食品の支持を解除し、
前記掬い上げ部は、前記爪部による支持が解除された前記食品を、前記第1駆動源により、斜め下方に降ろして、前記盛り付け領域上に該平面視で略U字状のままで載置する構成とした食品盛り付け装置。
【請求項5】
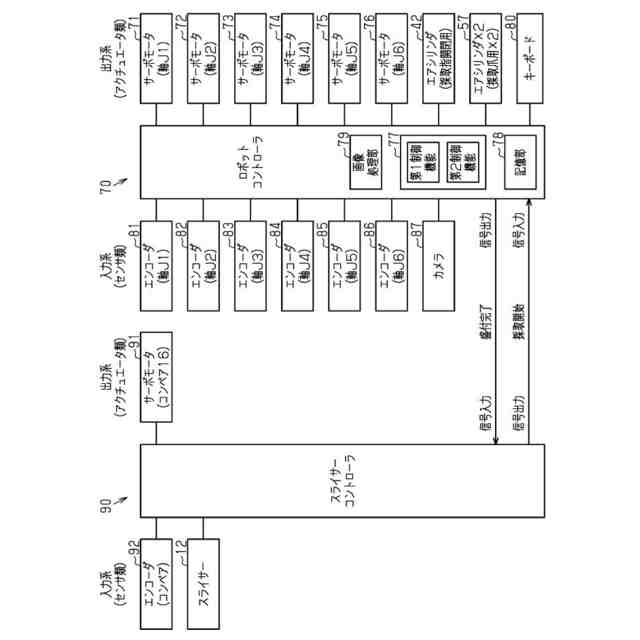
請求項4に記載の食品盛り付け装置を制御する制御部を備える食品盛り付け制御装置であって、
前記制御部は、前記ロボットアームに有する能動関節を制御する第1制御機能と、
前記ハンド装置を制御する第2制御機能とを備え、
前記第1制御機能によって、前記ロボットアームの前記能動関節を駆動制御して、前記ハンド装置を前記待機位置から、前記採取位置に移動させ、
前記第2制御機能によって、前記ハンド装置が前記採取位置に移動する際に、前記第2駆動源を制御して、前記指部が開状態または開状態で、かつ、前記爪部が進出位置に位置しているときの前記間隙に前記掬い上げ部を進入させるとともに、前記第1駆動源を制御して、前記採取位置に位置する前記食品を斜め上方へ掬い上げ、
前記第2制御機能によって、前記指部駆動源を制御して前記指部を閉じ方向へ移動させることで前記掬い上げられた食品を平面視で略U字状に変形させるとともに、前記進出位置に位置した爪部で前記掬い上げられた前記食品を支持し、
前記第1制御機能によって、前記食品が前記爪部にて支持された後に、前記能動関節を制御して、前記採取位置から離間した盛り付け領域上に前記ハンド装置を移動させ、
前記第2制御機能によって、前記ハンド装置が前記盛り付け領域上に移動した後、前記指部駆動源によって前記指部を開状態へ移行させる制御、及び前記爪部駆動源によって前記爪部を退出位置へ移動させる制御のうち、少なくとも前記爪部駆動源によって前記爪部を退出位置へ移動させる制御を行って、前記食品の支持を解除し、さらに、前記第1駆動源を制御して、前記掬い上げ部により、支持が解除された前記食品を斜め下方に降ろして、前記盛り付け領域上に該食品を平面視で略U字状のままで載置させる構成とした食品盛り付け制御装置。
【請求項6】
請求項5に記載の食品盛り付け制御装置において、
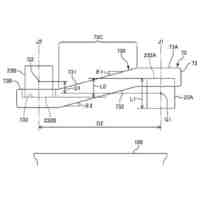
前記第1制御機能によって、前記能動関節を制御して、前記ロボットアームの先端を介して、前記採取位置から離間した盛り付け領域上に該ハンド装置を移動させる際、前記盛り付け領域上、またはその近辺で、前記ハンド装置を下方向と直交する方向へ一旦捻り、その後、前記捻りを戻しながら、前記第2制御機能の前記第1駆動源の制御により、前記掬い上げ部にて前記食品を斜め下方へ降ろすことにより、前記食品を平面視で略U字状のままで載置する構成とした食品盛り付け制御装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、食品盛り付け方法、ハンド装置、食品盛り付け装置、食品盛り付け制御装置に関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
ロボットにより食品を盛り付けする装置は、例えば特許文献1で公知である。また、特許文献2では、搬送コンベア上のパウチを、ロボットのエンドエフェクタが備える真空吸着装置により、ピッキングして、他の搬送コンベア上に移動載置することが開示されている。
【先行技術文献】
【特許文献】
【0003】
特許第6650119号
特開2019-10719号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1では、食品をコンベア上の食品容器に対して盛り付けする具体的な態様は、開示されていない。
特許文献2では、パウチを前述のごとく、真空吸着装置でピッキングして、1つずつ他のコンベア上にそれぞれ離間して載置して、前記他のコンベアで移送するようにしている。ところで、従来、スライサーによりスライスされたスライス肉は、コンベアに載せられて移送され、この移送中に、作業者により手作業でトレイに盛り付けられている。この理由は、スライス肉は、厚みが薄く、しなやかさに富むため、中間部を持つと、両端が垂れてしまう食品である点にある。従来は、このような食品についての盛り付けの自動化は、し難いため、手作業で行っていたのである。
【0005】
なお、上記特許文献1、2では、食品を好適に盛り付ける方法、ハンド装置、盛り付け装置、盛り付け制御装置については、技術的に改良の余地がある。このため、このような食品について好適な盛り付けができる方法、ハンド装置、食品盛り付け装置、食品盛り付け制御装置が望まれている。
【0006】
本発明の目的は、上記課題を解決して、柔らかい食品の盛り付けを好適に行える食品盛り付け方法、ハンド装置、食品盛り付け装置、食品盛り付け制御装置を提供することにある。
【課題を解決するための手段】
【0007】
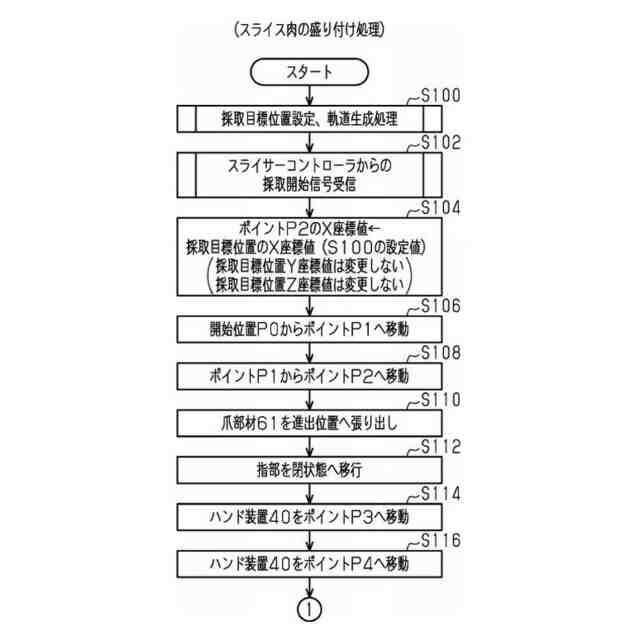
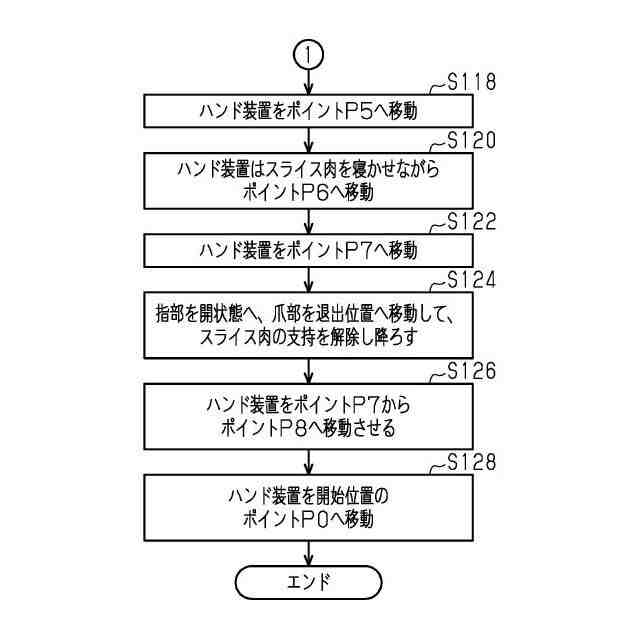
上記問題点を解決するために、本発明の第1の態様は、食品盛り付け方法が提供される。この食品盛り付け方法は、ハンド装置に有する採取部にて、採取位置に位置する食品の中間部を支持して、両端部を垂れ下げる第1工程と、前記採取位置から離間した盛り付け領域上に該ハンド装置を移動させる第2工程と、前記盛り付け領域に対して、前記ハンド装置を、下方向及び下方向と直交する方向へ移動させることにより、前記食品をその垂下端側から接触させて折り畳んだ状態で寝かせて前記採取部による支持を解除する第3工程を含む。
【0008】
本発明の第2の態様は、食品盛り付け方法が提供される。この食品盛り付け方法は、前記下方向と直交する方向は、前記ハンド装置が、前記第1工程の前記採取位置から、前記第2工程の前記盛り付け領域上へ移動する方向に対して、所定角度を有して設定される。
【0009】
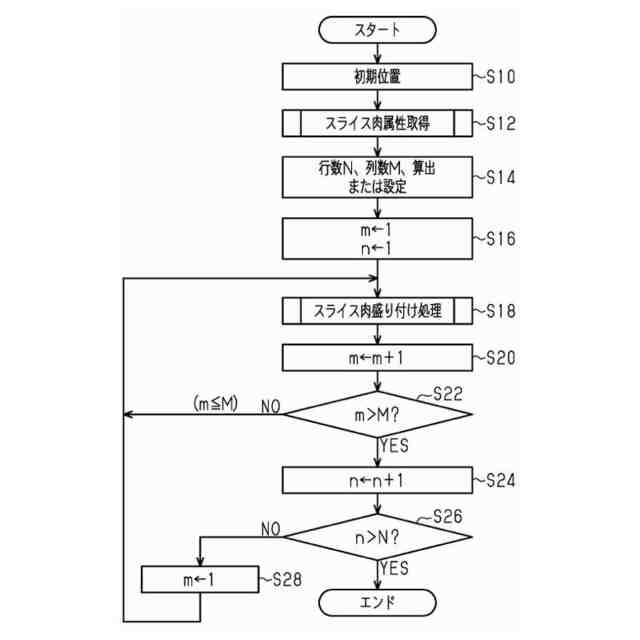
本発明の第3の態様は、食品盛り付け方法が提供される。この食品盛り付け方法は、前記盛り付け領域には、前記食品を所定行数M及び所定列数Nのうち、少なくともいずれか一方で配置される目標載置ポイントが設定されて、列順または行順に並ぶ前記目標載置ポイント毎に、前記第1工程、前記第2工程、及び第3工程がそれぞれ実行されて、前記食品が設定範囲内の重量で盛り付けられる。
【0010】
本発明の第4の態様は、前記採取部は、相互に開閉自在に設けられた複数の指部と、各指部から進退可能に作動し、前記食品を支持する爪部を有し、前記第1工程では、前記指部を閉状態へ移行させるとともに、前記爪部を進出させて、前記採取位置に位置する前記食品を該爪部にて支持した後に上方向に移動させてその両端部を垂れ下げし、前記第3工程では、前記指部を開状態へ移行させるとともに、前記爪部を退出させることにより、前記食品の支持を解除する。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
固定補助具
1か月前
個人
折りたたみ工具
22日前
株式会社三協システム
製函機
20日前
CKD株式会社
把持装置
21日前
株式会社三協システム
移載装置
19日前
株式会社不二越
ロボット操作装置
27日前
株式会社不二越
ロボットシステム
1か月前
日本精工株式会社
締結用工具
1か月前
SMC株式会社
着脱装置
20日前
株式会社ミクロブ
把持装置
21日前
太陽パーツ株式会社
アシストスーツ
22日前
株式会社不二越
移動ロボットシステム
1日前
ARMA株式会社
ジョイントフレーム
1か月前
株式会社不二越
エッジ仕上げ装置
11日前
本田技研工業株式会社
装置
4日前
株式会社不二越
ロボットシステム
22日前
株式会社不二越
ロボットシステム
19日前
トヨタ自動車株式会社
歩行ロボット
25日前
株式会社不二越
垂直多関節ロボット
12日前
ダイハツ工業株式会社
移載治具
1か月前
ライオン株式会社
移載システム
13日前
大和ハウス工業株式会社
ねじ回転工具
20日前
シンフォニアテクノロジー株式会社
搬送装置
1日前
セイコーエプソン株式会社
ロボット
20日前
セイコーエプソン株式会社
ロボット
1か月前
シヤチハタ株式会社
マーキング装置
25日前
セイコーエプソン株式会社
ロボット
1か月前
倉敷紡績株式会社
ハンドおよびコネクタ接続方法
11日前
セイコーエプソン株式会社
ロボット
29日前
シヤチハタ株式会社
マーキング装置
25日前
セコム株式会社
ロボット
1か月前
株式会社マキタ
電動工具
20日前
株式会社マキタ
電動工具
20日前
株式会社マキタ
電動工具
1日前
株式会社マキタ
電動工具
1日前
広島県
把持固定機構、及び把持固定ロボットハンド
25日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ