TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025135685
公報種別
公開特許公報(A)
公開日
2025-09-19
出願番号
2024033576
出願日
2024-03-06
発明の名称
モータ軸受摩耗監視装置、断線検出プログラム、断線推定プログラム、および断線検出方法
出願人
日機装株式会社
代理人
個人
主分類
H02K
11/20 20160101AFI20250911BHJP(電力の発電,変換,配電)
要約
【課題】キャンドモータポンプを停止させることなく安全に検出コイルの断線の有無を確認する。
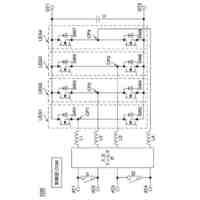
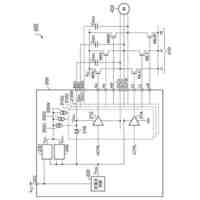
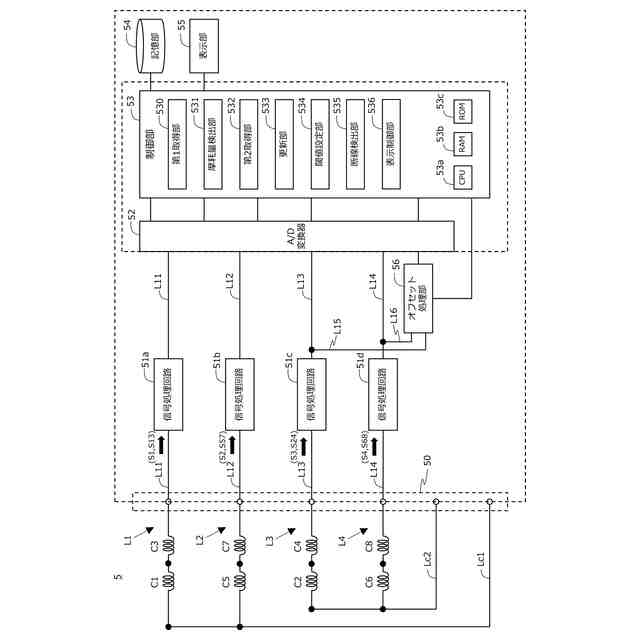
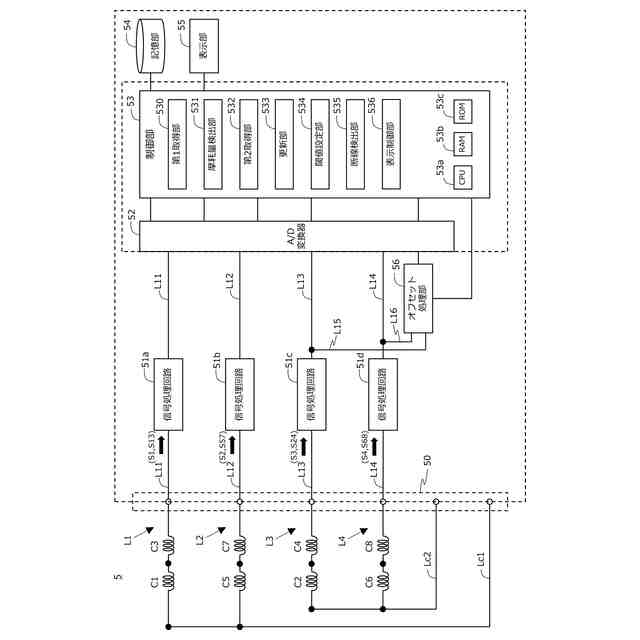
【解決手段】本発明に係るモータ軸受摩耗監視装置5は、ステータ37に対するロータ36の機械的な位置変化に対応する磁束変化を検出する複数の検出コイルC1~C8それぞれの検出信号に基づいて、軸受の摩耗状態を監視する。モータ軸受摩耗監視装置は、閾値記憶部53bと、ラジアル信号経路L1,L2を流れるラジアル経路信号とスラスト信号経路L3,L4を流れるスラスト経路信号とを取得する取得部532と、検出コイルとラジアル信号経路とスラスト信号経路それぞれの断線の有無を検出する断線検出部535と、を有してなる。断線検出部は、ラジアル経路信号とスラスト経路信号それぞれの電圧値とラジアル閾値とスラスト閾値とに基づいて、対応する検出コイルとラジアル信号経路とスラスト信号経路それぞれの断線の有無を検出する。
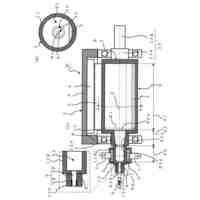
【選択図】図4
特許請求の範囲
【請求項1】
キャンドモータポンプのモータのステータに対するロータの機械的な位置変化に対応する磁束変化を検出する複数の検出コイルそれぞれの検出信号に基づいて、前記ロータの回転軸を支持する軸受の摩耗状態を監視するモータ軸受摩耗監視装置であって、
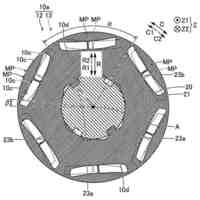
複数の前記検出コイルは、
前記回転軸のラジアル方向における前記磁束変化を検出する一組のラジアル検出コイルと、
前記回転軸のスラスト方向における前記磁束変化を検出する一組のスラスト検出コイルと、
を含み、
前記スラスト方向において、前記ラジアル検出コイルと前記スラスト検出コイルとは、前記ステータの一方向側または他方向側の端部に配置されて、
前記ラジアル検出コイルは、前記ラジアル検出コイルそれぞれの前記検出信号が合成されたラジアル合成信号が流れるラジアル信号経路に電気的に接続されて、
前記スラスト検出コイルは、前記スラスト検出コイルそれぞれの前記検出信号が合成されたスラスト合成信号が流れるスラスト信号経路に電気的に接続されて、
前記ラジアル合成信号の電圧値より小さくなるように設定されるラジアル閾値と、前記スラスト合成信号の電圧値より小さくなるように設定されるスラスト閾値と、を記憶する閾値記憶部と、
前記ラジアル信号経路を流れるラジアル経路信号と、前記スラスト信号経路を流れるスラスト経路信号と、を取得する取得部と、
前記検出コイルと、前記ラジアル信号経路と、前記スラスト信号経路それぞれの断線の有無を検出する断線検出部と、
を有してなり、
前記検出コイルと、前記ラジアル信号経路と、前記スラスト信号経路それぞれが断線していないとき、
前記ラジアル合成信号は、前記ラジアル経路信号として前記ラジアル信号経路を流れて、
前記スラスト合成信号は、前記スラスト経路信号として前記スラスト信号経路を流れて、
前記断線検出部は、
前記ラジアル経路信号の電圧値と前記ラジアル閾値とに基づいて、前記ラジアル検出コイルと前記ラジアル信号経路との前記断線の有無を検出して、
前記スラスト経路信号の電圧値と前記スラスト閾値とに基づいて、前記スラスト検出コイルと前記スラスト信号経路との前記断線の有無を検出する、
モータ軸受摩耗監視装置。
続きを表示(約 4,400 文字)
【請求項2】
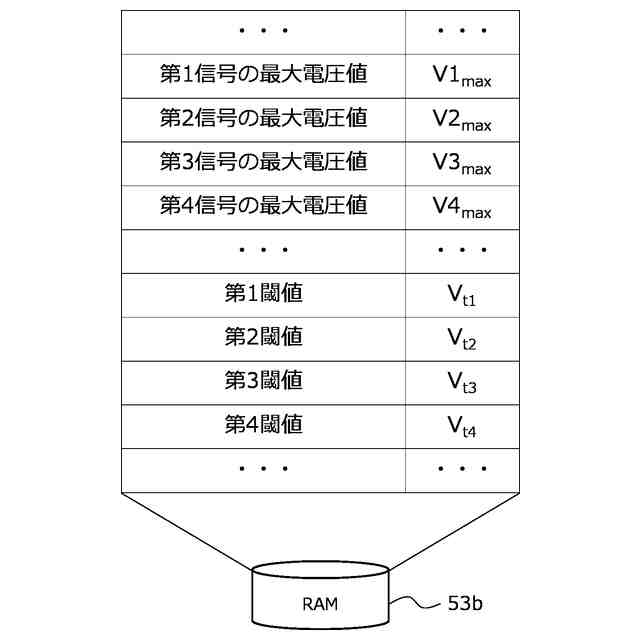
前記ラジアル合成信号の電圧値のうち、最大値となるラジアル最大電圧値と、
前記スラスト合成信号の電圧値のうち、最大値となるスラスト最大電圧値と、
を更新して記憶する電圧値記憶部、
を有してなり、
前記ラジアル閾値は、前記ラジアル最大電圧値に基づいて設定されて、
前記スラスト閾値は、前記スラスト最大電圧値に基づいて設定される、
請求項1に記載のモータ軸受摩耗監視装置。
【請求項3】
前記ラジアル閾値は、前記ラジアル経路信号に含まれるノイズ成分の信号レベルに基づいて、設定されて、
前記スラスト閾値は、前記スラスト経路信号に含まれるノイズ成分の信号レベルに基づいて、設定される、
請求項2に記載のモータ軸受摩耗監視装置。
【請求項4】
前記ラジアル閾値は、前記スラスト閾値よりも小さい、
請求項3に記載のモータ軸受摩耗監視装置。
【請求項5】
前記ラジアル閾値と、前記スラスト閾値それぞれを設定する閾値設定部、
を有してなる、
請求項1乃至4のいずれか1項に記載のモータ軸受摩耗監視装置。
【請求項6】
複数の前記検出コイルは、
一組の前記ラジアル検出コイルとして機能する一組の第1ラジアル検出コイルおよび一組の第2ラジアル検出コイルと、
一組の前記スラスト検出コイルとして機能する一組の第1スラスト検出コイルおよび一組の第2スラスト検出コイルと、
を含み、
前記第1ラジアル検出コイルと前記第1スラスト検出コイルとは、前記ステータの前記一方向側の端部に配置されて、
前記第2ラジアル検出コイルと前記第2スラスト検出コイルとは、前記ステータの前記他方向側の端部に配置されて、
前記ラジアル信号経路は、
前記第1ラジアル検出コイルと電気的に接続されて、前記第1ラジアル検出コイルそれぞれの前記検出信号が合成された第1合成信号が前記ラジアル合成信号として流れる第1経路と、
前記第2ラジアル検出コイルと電気的に接続されて、前記第2ラジアル検出コイルそれぞれの前記検出信号が合成された第2合成信号が前記ラジアル合成信号として流れる第2経路と、
を備えて、
前記スラスト信号経路は、
前記第1スラスト検出コイルと電気的に接続されて、前記第1スラスト検出コイルそれぞれの前記検出信号が合成された第3合成信号が前記スラスト合成信号として流れる第3経路と、
前記第2スラスト検出コイルと電気的に接続されて、前記第2スラスト検出コイルそれぞれの前記検出信号が合成された第4合成信号が前記スラスト合成信号として流れる第4経路と、
を備えて、
前記ラジアル閾値は、
前記第1合成信号の電圧値より小さくなるように設定される第1閾値と、
前記第2合成信号の電圧値より小さくなるように設定される第2閾値と、
を含み、
前記スラスト閾値は、
前記第3合成信号の電圧値より小さくなるように設定される第3閾値と、
前記第4合成信号の電圧値より小さくなるように設定される第4閾値と、
を含み、
前記取得部は、
前記第1経路を流れる第1信号と前記第2経路を流れる第2信号それぞれを前記ラジアル経路信号として取得して、
前記第3経路を流れる第3信号と前記第4経路を流れる第4信号それぞれを前記スラスト経路信号として取得して、
前記検出コイルと、前記第1経路と、前記第2経路と、前記第3経路と、前記第4経路それぞれが断線していないとき、
前記第1合成信号は、前記第1信号として前記第1経路を流れて、
前記第2合成信号は、前記第2信号として前記第2経路を流れて、
前記第3合成信号は、前記第3信号として前記第3経路を流れて、
前記第4合成信号は、前記第4信号として前記第4経路を流れて、
前記断線検出部は、
前記第1信号の電圧値と前記第1閾値とに基づいて、前記第1ラジアル検出コイルと前記第1経路との前記断線の有無を検出して、
前記第2信号の電圧値と前記第2閾値とに基づいて、前記第2ラジアル検出コイルと前記第2経路との前記断線の有無を検出して、
前記第3信号の電圧値と前記第3閾値とに基づいて、前記第1スラスト検出コイルと前記第3経路との前記断線の有無を検出して、
前記第4信号の電圧値と前記第4閾値とに基づいて、前記第2スラスト検出コイルと前記第4経路との前記断線の有無を検出する、
請求項1に記載のモータ軸受摩耗監視装置。
【請求項7】
キャンドモータポンプのモータのステータに対するロータの機械的な位置変化に対応する磁束変化を検出する複数の検出コイルそれぞれの検出信号に基づいて、前記ロータの回転軸を支持する軸受の摩耗状態を監視するモータ軸受摩耗監視装置であって、
複数の前記検出コイルは、
前記回転軸のラジアル方向における前記磁束変化を検出する一組のラジアル検出コイルと、
前記回転軸のスラスト方向における前記磁束変化を検出する一組のスラスト検出コイルと、
を含み、
前記スラスト方向において、前記ラジアル検出コイルと前記スラスト検出コイルとは、前記ステータの一方向側または他方向側の端部に配置されて、
前記ラジアル検出コイルは、前記ラジアル検出コイルそれぞれの前記検出信号が合成されたラジアル合成信号が流れるラジアル信号経路に電気的に接続されて、
前記スラスト検出コイルは、前記スラスト検出コイルそれぞれの前記検出信号が合成されたスラスト合成信号が流れるスラスト信号経路に電気的に接続されて、
前記ラジアル合成信号の電圧値のうち、最大値となるラジアル最大電圧値と、
前記スラスト合成信号の電圧値のうち、最大値となるスラスト最大電圧値と、
を更新して記憶する電圧値記憶部と、
前記ラジアル信号経路を流れるラジアル経路信号と、前記スラスト信号経路を流れるスラスト経路信号と、前記ラジアル最大電圧値と、前記スラスト最大電圧値と、を取得する取得部と、
前記ラジアル経路信号の電圧値と前記ラジアル最大電圧値とが入力されたとき、前記ラジアル検出コイルと前記ラジアル信号経路との断線の有無を推定するように機械学習された学習済みのラジアル学習モデルと、
前記スラスト経路信号の電圧値と前記スラスト最大電圧値とが入力されたとき、前記スラスト検出コイルと前記スラスト信号経路との断線の有無を推定するように機械学習された学習済みのスラスト学習モデルと、
を記憶する学習モデル記憶部と、
前記検出コイルと、前記ラジアル信号経路と、前記スラスト信号経路それぞれの断線の有無を推定する断線推定部と、
を有してなり、
前記検出コイルと、前記ラジアル信号経路と、前記スラスト信号経路それぞれが断線していないとき、
前記ラジアル合成信号は、前記ラジアル経路信号として前記ラジアル信号経路を流れて、
前記スラスト合成信号は、前記スラスト経路信号として前記スラスト信号経路を流れて、
前記断線推定部は、
前記ラジアル経路信号の前記電圧値と前記ラジアル最大電圧値とを前記ラジアル学習モデルに入力して、前記ラジアル検出コイルと前記ラジアル信号経路それぞれの断線の有無を推定して、
前記スラスト経路信号の前記電圧値と前記スラスト最大電圧値とを前記スラスト学習モデルに入力して、前記ラジアル検出コイルと前記スラスト信号経路それぞれの断線の有無を推定する、
モータ軸受摩耗監視装置。
【請求項8】
コンピュータを請求項1に記載のモータ軸受摩耗監視装置として機能させる、
断線検出プログラム。
【請求項9】
コンピュータを請求項7に記載のモータ軸受摩耗監視装置として機能させる、
断線推定プログラム。
【請求項10】
キャンドモータポンプのモータのステータに対するロータの機械的な位置変化に対応する磁束変化を検出する複数の検出コイルそれぞれの検出信号に基づいて、前記ロータの回転軸を支持する軸受の摩耗状態を監視するモータ軸受摩耗監視装置により実行される断線検出方法であって、
複数の前記検出コイルは、
前記回転軸のラジアル方向における前記磁束変化を検出する一組のラジアル検出コイルと、
前記回転軸のスラスト方向における前記磁束変化を検出する一組のスラスト検出コイルと、
を含み、
前記スラスト方向において、前記ラジアル検出コイルと前記スラスト検出コイルとは、前記ステータの一方向側または他方向側の端部に配置されて、
前記ラジアル検出コイルは、前記ラジアル検出コイルそれぞれの前記検出信号が合成されたラジアル合成信号が流れるラジアル信号経路に電気的に接続されて、
前記スラスト検出コイルは、前記スラスト検出コイルそれぞれの前記検出信号が合成されたスラスト合成信号が流れるスラスト信号経路に電気的に接続されて、
前記モータ軸受摩耗監視装置は、
前記ラジアル合成信号の電圧値より小さくなるように設定されるラジアル閾値と、前記スラスト合成信号の電圧値より小さくなるように設定されるスラスト閾値と、を記憶する閾値記憶部、
を備えて、
前記検出コイルと、前記ラジアル信号経路と、前記スラスト信号経路それぞれが断線していないとき、
前記ラジアル合成信号は、ラジアル経路信号として前記ラジアル信号経路を流れて、
前記スラスト合成信号は、スラスト経路信号として前記スラスト信号経路を流れて、
前記断線検出方法は、
前記モータ軸受摩耗監視装置が、前記ラジアル信号経路から前記ラジアル経路信号を取得して、前記スラスト信号経路から前記スラスト経路信号を取得する、取得ステップと、
前記モータ軸受摩耗監視装置が、前記ラジアル経路信号の電圧値と前記ラジアル閾値とに基づいて、前記ラジアル検出コイルと前記ラジアル信号経路それぞれの前記断線を検出して、前記スラスト経路信号の電圧値と前記スラスト閾値とに基づいて、前記ラジアル検出コイルと前記スラスト信号経路それぞれの前記断線を検出する、断線検出ステップと、
を含む、
断線検出方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、モータ軸受摩耗監視装置、断線検出プログラム、断線推定プログラム、および断線検出方法に関する。
続きを表示(約 4,100 文字)
【背景技術】
【0002】
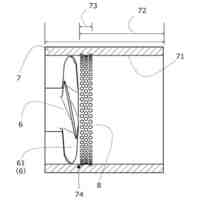
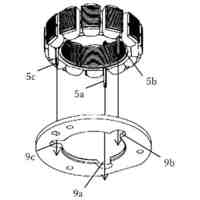
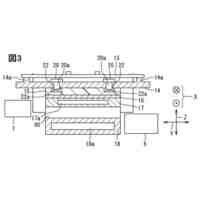
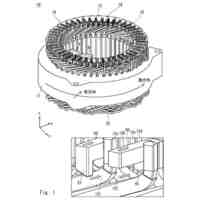
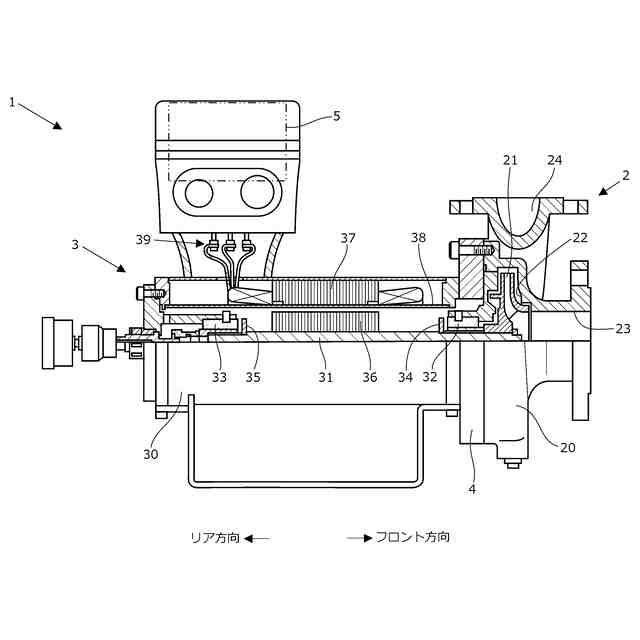
キャンドモータポンプは、ポンプとモータとが一体で、取扱液の漏洩が無い構造を有している。一般的に、キャンドモータポンプの回転構造部分(ロータ、回転軸、軸受、およびインペラ)は、取扱液で満たされるキャンに密封されている。そのため、キャンドモータポンプの内部構造は、外部から目視により監視できない。したがって、このような構造を有するキャンドモータポンプを効率よく運用するために、軸受の摩耗状態を監視する装置(以下「監視装置」という。)が用いられている(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
特開2013-78170号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
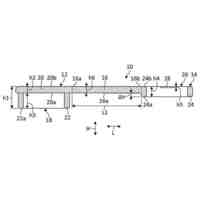
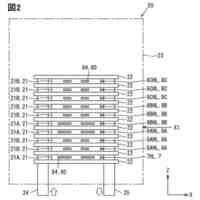
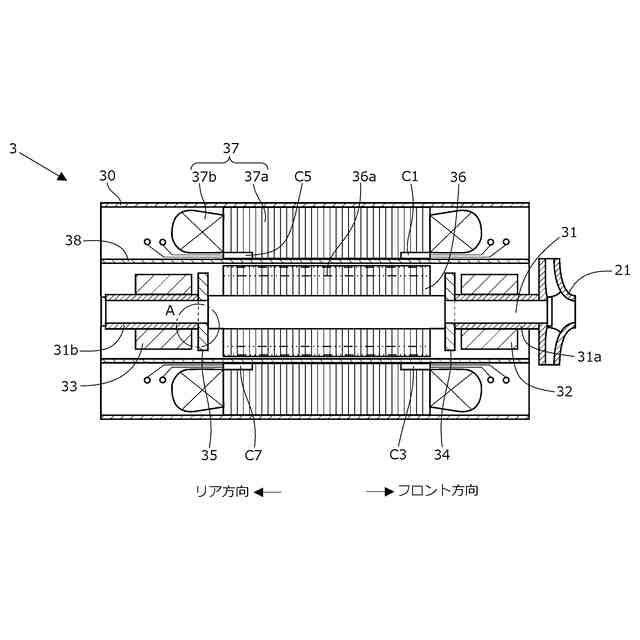
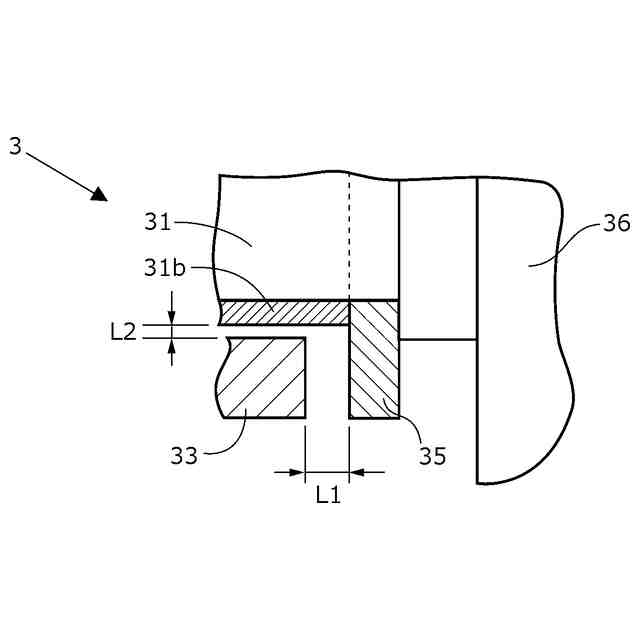
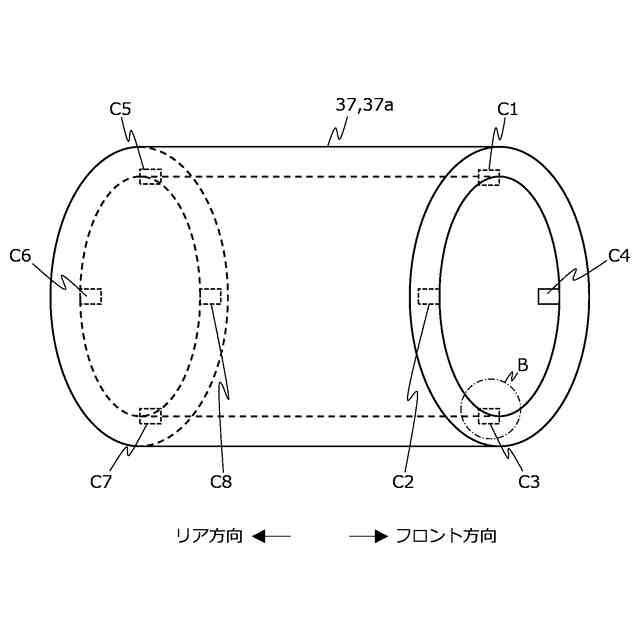
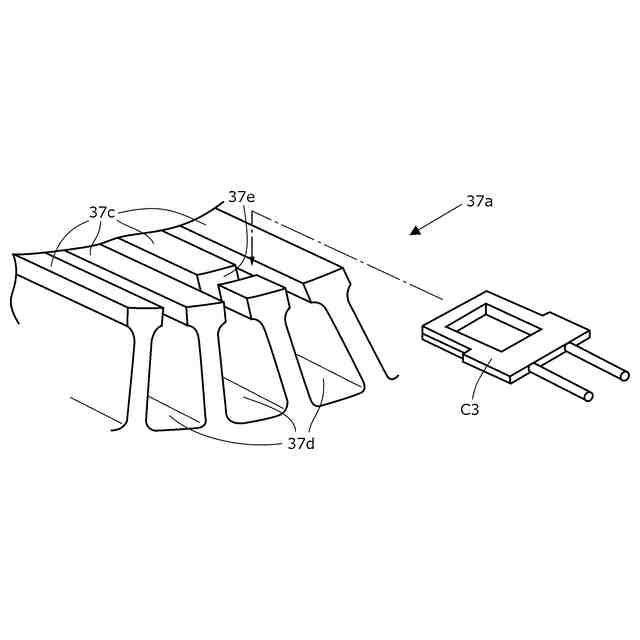
特許文献1に開示されている監視装置は、検出コイルを用いてロータの回転時の磁束変化を測定することにより、軸受の摩耗により生じるロータ(回転軸)の半径方向および軸方向の変位を監視している。検出コイルは、ステータの長手方向の両端に埋め込まれるように取り付けられている。そのため、検出コイルの断線の有無は、キャンドモータポンプの外部からは視覚的に確認できず、電気的に確認せざるを得ない。電気的な確認には、端子台へのアクセスが必要となる。しかしながら、作業者の安全面の観点から、動作中のキャンドモータポンプの端子台へのアクセスは難しく、防爆雰囲気下では端子台の露出も制限される。したがって、電気的な確認には、キャンドモータポンプの停止が必要となるが、キャンドモータポンプの停止は、製造設備やプラントの停止に繋がるため、容易ではない。
【0005】
本発明は、キャンドモータポンプを停止させることなく安全に検出コイルの断線の有無を確認可能なモータ軸受摩耗監視装置、断線検出プログラム、断線推定プログラム、および断線検出方法を提供することを目的とする。
【課題を解決するための手段】
【0006】
本発明の一実施態様におけるモータ軸受摩耗監視装置は、キャンドモータポンプのモータのステータに対するロータの機械的な位置変化に対応する磁束変化を検出する複数の検出コイルそれぞれの検出信号に基づいて、前記ロータの回転軸を支持する軸受の摩耗状態を監視するモータ軸受摩耗監視装置であって、複数の前記検出コイルは、前記回転軸のラジアル方向における前記磁束変化を検出する少なくとも一組のラジアル検出コイルと、前記回転軸のスラスト方向における前記磁束変化を検出する少なくとも一組のスラスト検出コイルと、を含み、前記スラスト方向において、前記ラジアル検出コイルと前記スラスト検出コイルとは、前記ステータの一方向側または他方向側の端部に配置されて、前記ラジアル検出コイルは、前記ラジアル検出コイルそれぞれの前記検出信号が合成されたラジアル合成信号が流れるラジアル信号経路に電気的に接続されて、前記スラスト検出コイルは、前記スラスト検出コイルそれぞれの前記検出信号が合成されたスラスト合成信号が流れるスラスト信号経路に電気的に接続されて、前記ラジアル合成信号の電圧値より小さくなるように設定されるラジアル閾値と、前記スラスト合成信号の電圧値より小さくなるように設定されるスラスト閾値と、を記憶する閾値記憶部と、前記ラジアル信号経路を流れるラジアル経路信号と、前記スラスト信号経路を流れるスラスト経路信号と、を取得する取得部と、前記検出コイルと、前記ラジアル信号経路と、前記スラスト信号経路それぞれの断線の有無を検出する断線検出部と、を有してなり、前記検出コイルと、前記ラジアル信号経路と、前記スラスト信号経路それぞれが断線していないとき、前記ラジアル合成信号は、前記ラジアル経路信号として前記ラジアル信号経路を流れて、前記スラスト合成信号は、前記スラスト経路信号として前記スラスト信号経路を流れて、前記断線検出部は、前記ラジアル経路信号の電圧値と前記ラジアル閾値とに基づいて、前記ラジアル検出コイルと前記ラジアル信号経路との前記断線の有無を検出して、前記スラスト経路信号の電圧値と前記スラスト閾値とに基づいて、前記スラスト検出コイルと前記スラスト信号経路との前記断線の有無を検出する。
【0007】
本発明の一実施態様におけるモータ軸受摩耗監視装置は、キャンドモータポンプのモータのステータに対するロータの機械的な位置変化に対応する磁束変化を検出する複数の検出コイルそれぞれの検出信号に基づいて、前記ロータの回転軸を支持する軸受の摩耗状態を監視するモータ軸受摩耗監視装置であって、複数の前記検出コイルは、前記回転軸のラジアル方向における前記磁束変化を検出する一組のラジアル検出コイルと、前記回転軸のスラスト方向における前記磁束変化を検出する一組のスラスト検出コイルと、を含み、前記スラスト方向において、前記ラジアル検出コイルと前記スラスト検出コイルとは、前記ステータの一方向側または他方向側の端部に配置されて、前記ラジアル検出コイルは、前記ラジアル検出コイルそれぞれの前記検出信号が合成されたラジアル合成信号が流れるラジアル信号経路に電気的に接続されて、前記スラスト検出コイルは、前記スラスト検出コイルそれぞれの前記検出信号が合成されたスラスト合成信号が流れるスラスト信号経路に電気的に接続されて、前記ラジアル合成信号の電圧値のうち、最大値となるラジアル最大電圧値と、前記スラスト合成信号の電圧値のうち、最大値となるスラスト最大電圧値と、を更新して記憶する電圧値記憶部と、前記ラジアル信号経路を流れるラジアル経路信号と、前記スラスト信号経路を流れるスラスト経路信号と、前記ラジアル最大電圧値と、前記スラスト最大電圧値と、を取得する取得部と、前記ラジアル経路信号の電圧値と前記ラジアル最大電圧値とが入力されたとき、前記ラジアル検出コイルと前記ラジアル信号経路との断線の有無を推定するように機械学習された学習済みのラジアル学習モデルと、前記スラスト経路信号の電圧値と前記スラスト最大電圧値とが入力されたとき、前記スラスト検出コイルと前記スラスト信号経路との断線の有無を推定するように機械学習された学習済みのスラスト学習モデルと、を記憶する学習モデル記憶部と、前記検出コイルと、前記ラジアル信号経路と、前記スラスト信号経路それぞれの断線の有無を推定する断線推定部と、を有してなり、前記検出コイルと、前記ラジアル信号経路と、前記スラスト信号経路それぞれが断線していないとき、前記ラジアル合成信号は、前記ラジアル経路信号として前記ラジアル信号経路を流れて、前記スラスト合成信号は、前記スラスト経路信号として前記スラスト信号経路を流れて、前記断線推定部は、前記ラジアル経路信号の前記電圧値と前記ラジアル最大電圧値とを前記ラジアル学習モデルに入力して、前記ラジアル検出コイルと前記ラジアル信号経路それぞれの断線の有無を推定して、前記スラスト経路信号の前記電圧値と前記スラスト最大電圧値とを前記スラスト学習モデルに入力して、前記ラジアル検出コイルと前記スラスト信号経路それぞれの断線の有無を推定する。
【0008】
本発明の一実施態様における断線検出プログラムは、コンピュータを上記1つ目の実施態様におけるモータ軸受摩耗監視装置として機能させる。
【0009】
本発明の一実施態様における断線推定プログラムは、コンピュータを上記2つ目の実施態様におけるモータ軸受摩耗監視装置として機能させる。
【0010】
本発明の一実施態様における断線検出方法は、キャンドモータポンプのモータのステータに対するロータの機械的な位置変化に対応する磁束変化を検出する複数の検出コイルそれぞれの検出信号に基づいて、前記ロータの回転軸を支持する軸受の摩耗状態を監視するモータ軸受摩耗監視装置により実行される断線検出方法であって、複数の前記検出コイルは、前記回転軸のラジアル方向における前記磁束変化を検出する一組のラジアル検出コイルと、前記回転軸のスラスト方向における前記磁束変化を検出する一組のスラスト検出コイルと、を含み、前記スラスト方向において、前記ラジアル検出コイルと前記スラスト検出コイルとは、前記ステータの一方向側または他方向側の端部に配置されて、前記ラジアル検出コイルは、前記ラジアル検出コイルそれぞれの前記検出信号が合成されたラジアル合成信号が流れるラジアル信号経路に電気的に接続されて、前記スラスト検出コイルは、前記スラスト検出コイルそれぞれの前記検出信号が合成されたスラスト合成信号が流れるスラスト信号経路に電気的に接続されて、前記モータ軸受摩耗監視装置は、前記ラジアル合成信号の電圧値より小さくなるように設定されるラジアル閾値と、前記スラスト合成信号の電圧値より小さくなるように設定されるスラスト閾値と、を記憶する閾値記憶部、を備えて、前記検出コイルと、前記ラジアル経路と、前記スラスト経路それぞれが断線していないとき、前記ラジアル合成信号は、ラジアル経路信号として前記ラジアル信号経路を流れて、前記スラスト合成信号は、スラスト経路信号として前記スラスト信号経路を流れて、前記断線検出方法は、前記モータ軸受摩耗監視装置が、前記ラジアル信号経路から前記ラジアル経路信号を取得して、前記スラスト信号経路から前記スラスト経路信号を取得する、取得ステップと、前記モータ軸受摩耗監視装置が、前記ラジアル経路信号の電圧値と前記ラジアル閾値とに基づいて、前記ラジアル検出コイルと前記ラジアル信号経路それぞれの前記断線を検出して、前記スラスト経路信号の電圧値と前記スラスト閾値とに基づいて、前記ラジアル検出コイルと前記スラスト信号経路それぞれの前記断線を検出する、断線検出ステップと、を含む。
【発明の効果】
(【0011】以降は省略されています)
特許ウォッチbot のツイートを見る
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
日機装株式会社
加圧装置
21日前
日機装株式会社
遠心ポンプ
1か月前
日機装株式会社
半導体発光装置
8日前
日機装株式会社
キャップ、コネクタおよび装置
1か月前
日機装株式会社
窒化物半導体発光素子の製造方法
1日前
日機装株式会社
乳酸吸着剤、乳酸除去装置および乳酸除去方法
23日前
日機装株式会社
半導体発光素子および半導体発光素子の製造方法
6日前
日機装株式会社
血液浄化装置、血液浄化システム、及び情報移行方法
1か月前
個人
単極モータ
1か月前
個人
高圧電気機器の開閉器
1日前
個人
電気を重力で発電装置
14日前
キヤノン電子株式会社
モータ
21日前
キヤノン電子株式会社
モータ
13日前
株式会社アイシン
ロータ
1か月前
株式会社アイシン
ロータ
1か月前
日星電気株式会社
ケーブル組立体
29日前
コーセル株式会社
電源装置
22日前
株式会社アイドゥス企画
減反モータ
1日前
トヨタ自動車株式会社
モータ
13日前
株式会社デンソー
回転機
1か月前
個人
二次電池繰返パルス放電器用印刷基板
27日前
株式会社kaisei
発電システム
1か月前
株式会社ミツバ
回転電機
1か月前
株式会社デンソー
電力変換装置
28日前
株式会社デンソー
電力変換装置
1か月前
株式会社デンソー
非接触受電装置
1か月前
株式会社ダイヘン
インバータ装置
1か月前
トヨタ自動車株式会社
固定子の加熱装置
24日前
矢崎総業株式会社
電源回路
今日
個人
非対称鏡像力を有する4層PWB電荷搬送体
8日前
山洋電気株式会社
モータ
27日前
矢崎総業株式会社
ワイヤーハーネス
1か月前
トヨタ自動車株式会社
ステータの製造装置
14日前
ローム株式会社
モータドライバ回路
8日前
日産自動車株式会社
ロータシャフト
8日前
日産自動車株式会社
ロータシャフト
8日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ