TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025125693
公報種別
公開特許公報(A)
公開日
2025-08-28
出願番号
2024021792
出願日
2024-02-16
発明の名称
ロボットハンドおよびロボットシステム
出願人
グローリー株式会社
代理人
個人
主分類
B25J
15/00 20060101AFI20250821BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】パレット上にピンホール積みされた対象物および/またはパレット上にピンホール積みする対象物を安定的にハンドリングすることが可能なロボットハンド、ならびにそれに関連する技術を提供する。
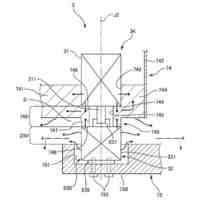
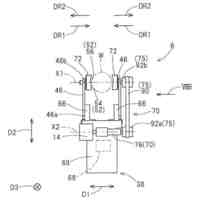
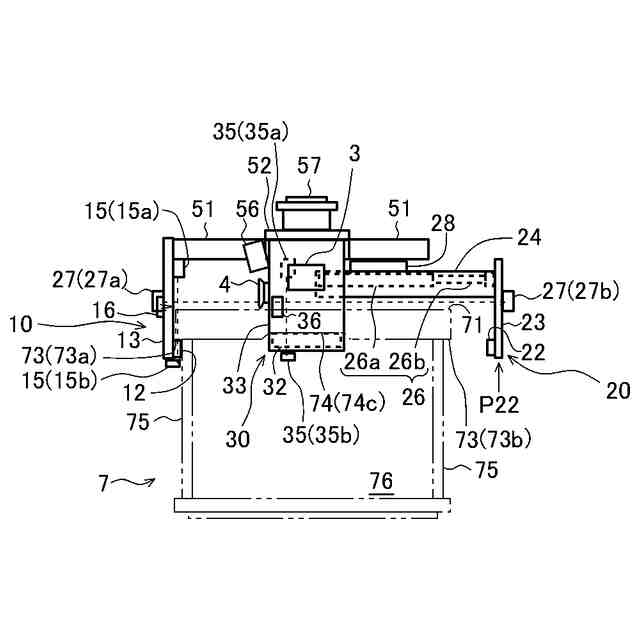
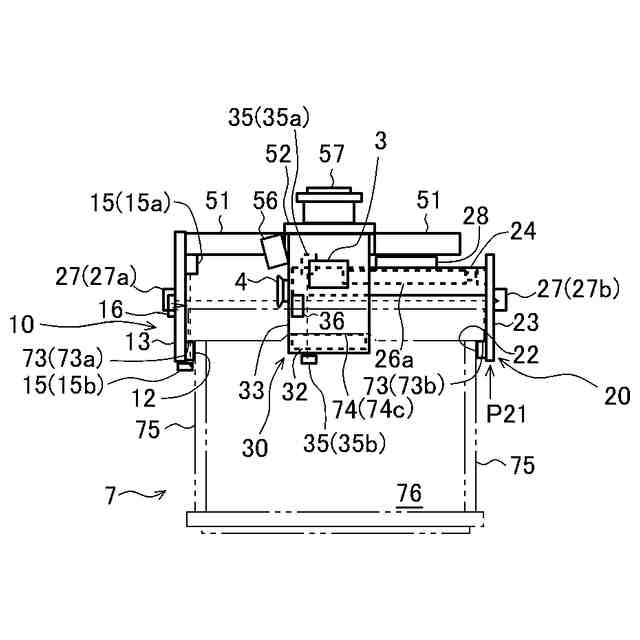
【解決手段】ロボットハンド2bは、本体部50の第1方向における一端側に設けられコンテナ7の第1方向における一端側を保持する保持部10と、本体部50の第1方向における他端側に設けられコンテナ7の第1方向における他端側を保持する保持部20と、本体部50の第2方向における一端側に設けられコンテナ7の第2方向における一端側を保持する保持部30とを備える。保持部10および保持部20は、本体部50の第2方向における他端側に設けられる。保持部10と保持部20とのうちの一方の保持部は、ピンホール積みにおけるピンホール6hに挿入された状態でコンテナ7に接触してコンテナ7を保持する。
【選択図】図20
特許請求の範囲
【請求項1】
パレット上にピンホール積みされた及び/又はパレット上にピンホール積みする対象物をハンドリングするロボットハンドであって、
本体部と、
前記本体部の第1方向における一端側に設けられ前記対象物の前記第1方向における一端側を保持する第1保持部と、
前記本体部の前記第1方向における他端側に設けられ前記対象物の前記第1方向における他端側を保持する第2保持部と、
前記本体部の第2方向における一端側に設けられ前記対象物の前記第2方向における一端側を保持する第3保持部と、
を備え、
前記第2方向は、前記第1方向に対して垂直な方向であり、
前記第1保持部および前記第2保持部は、前記本体部の前記第2方向における他端側に設けられ、
前記第1保持部と前記第2保持部とのうちの一方の保持部は、前記ピンホール積みにおけるピンホールに挿入された状態で前記対象物に接触して前記対象物を保持することを特徴とするロボットハンド。
続きを表示(約 1,700 文字)
【請求項2】
前記第1保持部と前記第2保持部とは前記第1方向において相対的に移動可能であることを特徴とする、請求項1に記載のロボットハンド。
【請求項3】
前記第1保持部は、前記本体部に対して固定されており、
前記第2保持部は、前記本体部に対して前記第1方向に移動可能であることを特徴とする、請求項2に記載のロボットハンド。
【請求項4】
前記第1保持部と前記第2保持部とのうちの他方の保持部は、前記第1方向において前記ピンホールとは反対側にて、前記対象物に接触して前記対象物を保持し、
前記第3保持部は、前記第2方向において前記ピンホールとは反対側にて、前記対象物に接触して前記対象物を保持することを特徴とする、請求項1に記載のロボットハンド。
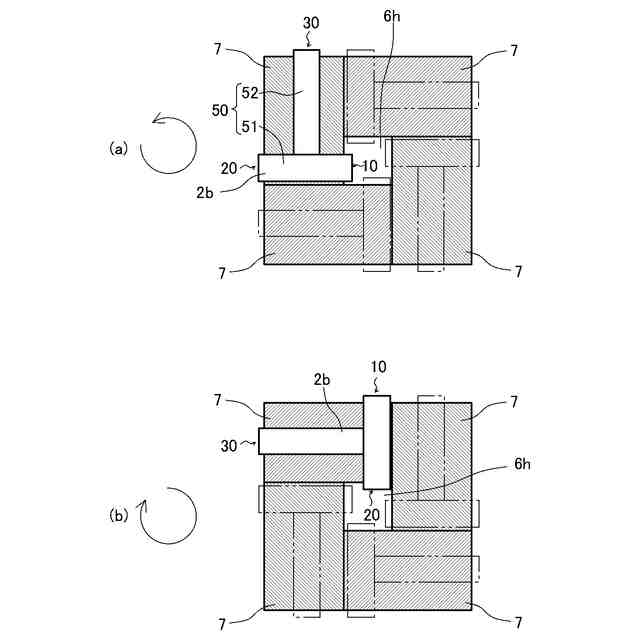
【請求項5】
前記ピンホール積みが所定の向きである場合、
前記第1保持部は、当該ピンホール積みにおける前記ピンホールに挿入された状態で前記対象物に接触して前記対象物を保持し、且つ、
前記第2保持部は、前記第1方向において前記ピンホールとは反対側にて、前記対象物に接触して前記対象物を保持し、
前記ピンホール積みが前記所定の向きとは逆向きである場合、
前記第2保持部は、当該ピンホール積みにおける前記ピンホールに挿入された状態で前記対象物に接触して前記対象物を保持し、且つ、
前記第1保持部は、前記第1方向において前記ピンホールとは反対側にて、前記対象物に接触して前記対象物を保持することを特徴とする、請求項1に記載のロボットハンド。
【請求項6】
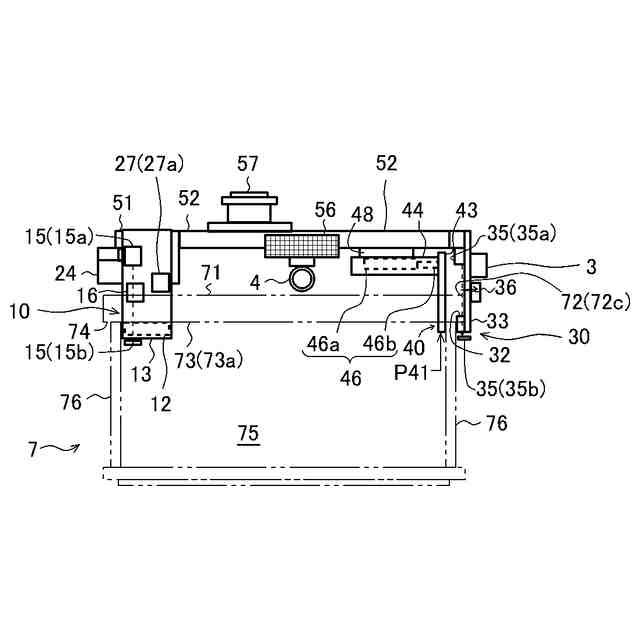
前記対象物は、各側面に突出部を有するコンテナであり、
前記第1保持部は、前記コンテナの短手方向一端側の突出部を下から支持し、
前記第2保持部は、前記コンテナの短手方向他端側の突出部を下から支持し、
前記第3保持部は、前記コンテナの長手方向一端側の突出部を下から支持することを特徴とする、請求項1に記載のロボットハンド。
【請求項7】
前記本体部に対して前記第2方向において移動可能な第4保持部、
をさらに備え、
前記第3保持部は、前記本体部に対して固定されており、
前記第4保持部は、前記コンテナの一の側面部材を挟んで前記第3保持部に対向する第1位置であって前記一の側面部材の前記第2方向における移動を規制して前記第3保持部によるコンテナ支持の解除を回避する第1位置と、前記第2方向において前記第1位置に対して前記第3保持部から離間する側の第2位置との間で移動することが可能であることを特徴とする、請求項6に記載のロボットハンド。
【請求項8】
前記第1保持部は、前記第2方向において前記ピンホールの一辺よりも短い幅を有することを特徴とする、請求項1に記載のロボットハンド。
【請求項9】
パレット上にピンホール積みされた及び/又はパレット上にピンホール積みする対象物をハンドリングするロボットシステムであって、
ロボットアームと、
前記ロボットアームの手先に装着されるロボットハンドと、
を備え、
前記ロボットアームは、
本体部と、
前記本体部の第1方向における一端側に設けられ前記対象物の前記第1方向における一端側を保持する第1保持部と、
前記本体部の前記第1方向における他端側に設けられ前記対象物の前記第1方向における他端側を保持する第2保持部と、
前記本体部の第2方向における一端側に設けられ前記対象物の前記第2方向における一端側を保持する第3保持部と、
を備え、
前記第2方向は、前記第1方向に対して垂直な方向であり、
前記第1保持部および前記第2保持部は、前記本体部の前記第2方向における他端側に設けられ、
前記第1保持部と前記第2保持部とのうちの一方の保持部は、前記ピンホール積みにおけるピンホールに挿入された状態で前記対象物に接触して前記対象物を保持することを特徴とするロボットシステム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、ロボットハンドおよびそれに関連する技術に関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
荷物などの対象物をハンドリングするロボットハンドが存在する。詳細には、パレット上に積載された複数の対象物(荷物等)を当該パレット上から降ろすデパレタイズ作業において、ロボットハンドを活用する技術が存在する。
【0003】
たとえば、特許文献1には、側面に取手を有する段ボールケース、プラスチックコンテナ等の荷物をハンドリングするロボットハンドが記載されている。当該ロボットハンドは、二本の開閉式のアームを有し、アームの先端に上向きに独立に可倒自在の複数の爪を有する。当該ロボットハンドは、荷物に設けられた取手に当該複数の爪のいずれかを引っ掛けて、当該荷物をピッキングする。
【0004】
また、特許文献1には、荷物(対象物)を把持する際に、荷物の一方の側面(たとえば右側面)が他の荷物等に隣接しており一方のアームを差し入れる隙間がない場合に、ロボットハンドと当該他の荷物(隣接物)との干渉を回避する手法が記載されている(特許文献1の段落0015参照)。具体的には、他方のアーム(たとえば左アーム)の爪で荷物の取っ手を引っ掛け且つロボットハンドを若干上昇させた状態(荷物の左側を若干持ち上がて荷物を傾けた状態)で、ロボットハンドを左向きに(隣接物とは反対側に)移動させる。この移動動作に伴って、荷物(対象物)が左向きにスライドして引き出され、荷物(対象物)と隣の荷物(隣接物)との間にアームを差し入れる隙間が生成され、当該隙間に他方のアーム(たとえば右アーム)が差し入れられる。このようにしてロボットハンドが荷物を把持すること(端的に言えば、荷物を一旦スライドさせてピッキングすること)が記載されている。
【先行技術文献】
【特許文献】
【0005】
特開平8-282845号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
パレット上には様々な積載手法で複数の対象物が積載される。たとえば、パレット上に複数段の対象物が積層されるとともに、各段において複数の対象物がピンホール積み(風車積み)で配置(平面配置等)されることがある。積載効率向上等のため、ピンホール積みにおいても、各対象物は、隣接する対象物に接触して配置されることが多い。
【0007】
ピンホール積みされた対象物をパレット上から降ろすデパレタイズ作業において、対象物を確実にピッキングすることは容易ではない。特に、各対象物が隣接物(各対象物に隣接する別の対象物)に接触して配置される場合、当該隣接物とロボットハンドとの干渉を回避することが求められる。
【0008】
たとえば、上記特許文献1に記載された手法(荷物を一旦スライドさせてピッキングする手法)を用いることによれば、当該干渉を回避することが可能である。
【0009】
しかしながら、当該手法を用いる場合、荷物がスライドされる期間において荷物の一方側のみが持ち上げられて荷物が斜めに傾くので、荷物が不安定な状態を有する。このような不安定な状態は、荷物のハンドリングにおいては避けることが好ましい。
【0010】
また、このような状況は、デパレタイズ作業のみならずパレタイズ作業においても同様である。すなわち、複数の対象物(荷物等)をパレット上にピンホール積みで積載するパレタイズ作業において、各対象物をハンドリングする際にも同様の状況が発生する。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
折りたたみ工具
1か月前
個人
フラワーホッチキス。
1日前
株式会社三協システム
製函機
1か月前
川崎重工業株式会社
ロボット
14日前
株式会社不二越
ロボット
13日前
株式会社竹中工務店
補助セット
13日前
CKD株式会社
把持装置
1か月前
株式会社三協システム
移載装置
1か月前
川崎重工業株式会社
ハンド
5日前
株式会社ミクロブ
把持装置
1か月前
太陽パーツ株式会社
アシストスーツ
1か月前
SMC株式会社
着脱装置
1か月前
株式会社不二越
移動ロボットシステム
16日前
工機ホールディングス株式会社
作業機
5日前
トヨタ自動車株式会社
ロボット
8日前
株式会社不二越
ロボットシステム
1か月前
本田技研工業株式会社
装置
19日前
川崎重工業株式会社
塗装システム
5日前
株式会社不二越
ロボットシステム
1か月前
株式会社不二越
エッジ仕上げ装置
26日前
株式会社不二越
垂直多関節ロボット
27日前
トヨタ自動車株式会社
軌道生成装置
8日前
大和ハウス工業株式会社
ねじ回転工具
1か月前
ライオン株式会社
移載システム
28日前
アネックスツール株式会社
ドライバービット
12日前
工機ホールディングス株式会社
作業機
5日前
シンフォニアテクノロジー株式会社
搬送装置
16日前
株式会社マキタ
回転打撃工具
8日前
ワールド技研株式会社
ロボットセル装置
13日前
川崎重工業株式会社
ワーク搬送ロボット
5日前
トヨタ自動車株式会社
ロボットの制御装置
12日前
山九株式会社
レンチ保持治具
8日前
セイコーエプソン株式会社
ロボット
1か月前
NTN株式会社
ハンド
14日前
セイコーエプソン株式会社
ロボット
12日前
倉敷紡績株式会社
ハンドおよびコネクタ接続方法
26日前
続きを見る
他の特許を見る






 特許ウォッチ
特許ウォッチ