TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025107150
公報種別
公開特許公報(A)
公開日
2025-07-17
出願番号
2024227035
出願日
2024-12-24
発明の名称
電動自転車の駆動アッセンブリを運転する方法
出願人
ロベルト・ボッシュ・ゲゼルシャフト・ミト・ベシュレンクテル・ハフツング
,
ROBERT BOSCH GMBH
代理人
個人
,
個人
主分類
B62M
6/45 20100101AFI20250710BHJP(鉄道以外の路面車両)
要約
【課題】負荷のないシフトプロセスが達成され得る電動自転車を提供する。
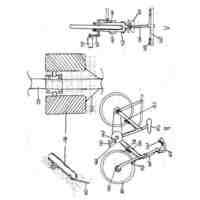
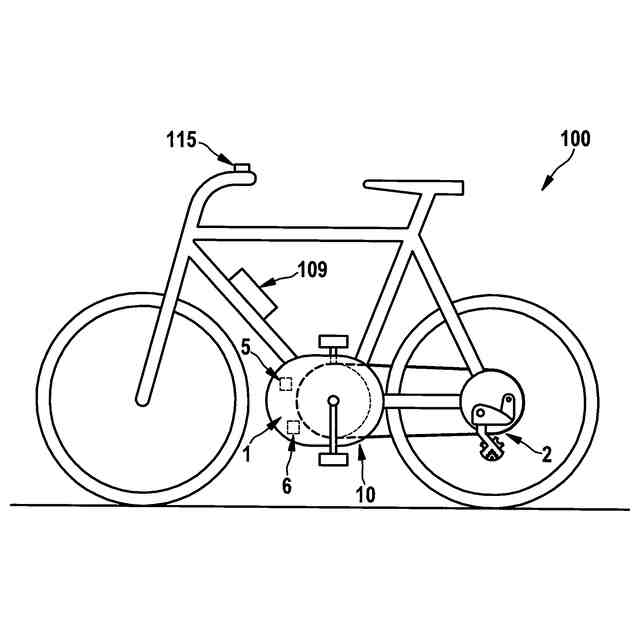
【解決手段】本発明は、電動自転車100の駆動アッセンブリ10を運転する方法であって、駆動アッセンブリ10は、駆動ユニット1と、制御可能に操作可能なギヤシフト機構2と、を有し、駆動ユニット1の目下の駆動負荷を求めるステップと、駆動ユニット1の原動機回転数を、駆動負荷が予め決めた係合負荷に到達する係合回転数に、制御して上昇させるステップと、ギヤシフト機構2により最大で係合回転数での駆動ユニット1の運転中に制御してシフトするステップと、を含む、電動自転車100の駆動アッセンブリ10を運転する方法に関する。
【選択図】図1
特許請求の範囲
【請求項1】
電動自転車(100)の駆動アッセンブリ(10)を運転する方法であって、
前記駆動アッセンブリ(10)は、駆動ユニット(1)と、制御可能に操作可能なギヤシフト機構(2)と、を有し、次の各ステップ、すなわち、
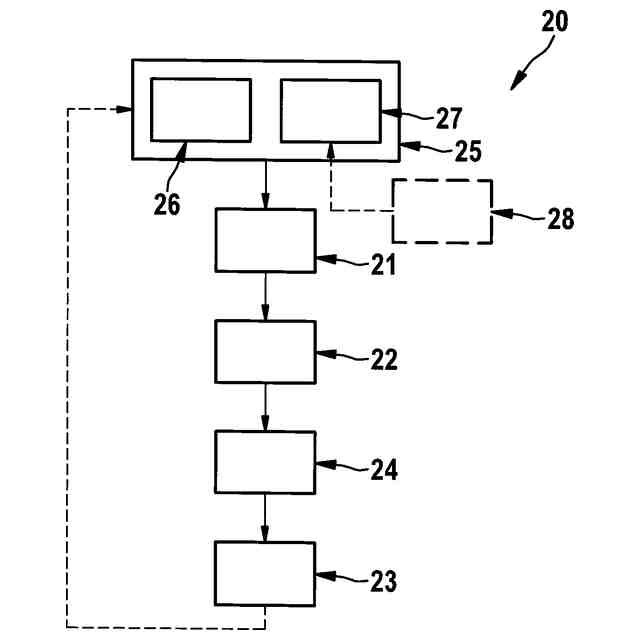
前記駆動ユニット(1)の目下の駆動負荷を求めるステップ(21)と、
前記駆動ユニット(1)の原動機回転数を、前記駆動負荷が予め決めた係合負荷に到達する係合回転数に、制御して上昇させるステップ(22)と、
前記ギヤシフト機構(2)により最大で前記係合回転数での前記駆動ユニット(1)の運転中に制御してシフトするステップと、
を含む、
電動自転車の駆動アッセンブリを運転する方法。
続きを表示(約 1,200 文字)
【請求項2】
シフト回転数を求めるステップ(24)であって、前記シフト回転数が、予め決めたシフトオフセットの分だけ前記係合回転数より小さいようにするステップ(24)をさらに含み、このとき、制御してシフトする前記ステップを前記シフト回転数で実施し、特に前記シフト回転数は、常に0回転/分より大きい、
請求項1に記載の方法。
【請求項3】
前記シフトオフセットは、前記係合回転数の少なくとも5%、好ましくは、少なくとも10%、特に最大30%であるか、または
前記シフトオフセットは、少なくとも5回転/分、好ましくは、少なくとも10回転/分、特に最大30回転/分である、
請求項2に記載の方法。
【請求項4】
前記駆動ユニット(1)を、前記シフト回転数でもって、少なくとも1つの予め決めたタイムスパンの間、かつ/または少なくとも1つの予め決めた回数の回転の間、制御して運転するステップ(23)をさらに含む、
請求項2または3のいずれか一項に記載の方法。
【請求項5】
前記係合負荷は、最大15Nm、好ましくは、最大10Nm、特に最大5Nm、好ましくは、少なくとも3Nmである、
請求項1から4のいずれか一項に記載の方法。
【請求項6】
目標回転数を求めるステップ(25)をさらに含み、
このとき、前記原動機回転数を制御して上昇させる前記ステップ(22)を前記目標回転数の連続的な上昇により実施する、
請求項1から5のいずれか一項に記載の方法。
【請求項7】
前記目標回転数を最大の目標回転数に制限するステップであって、特に、前記最大の目標回転数は、求めた後輪回転数と、求めた目下のギヤ比とに基づいて決めるステップをさらに含む、
請求項6に記載の方法。
【請求項8】
目標回転数として最初に、求めた目下の原動機回転数、または求めた目下の前記原動機回転数から、予め決めた回転数オフセットを差し引いて、または予め規定した回転数、または求めた前記後輪回転数に、求めた目下の前記ギヤ比を乗算して、特にオフセットを差し引いて、設定する、
請求項6または7に記載の方法。
【請求項9】
前記目標回転数を、予め決めたタイムスパンの経過に応答して、かつ/または予め決めたセンサ信号、特に回転数センサおよび/または速度センサの回転信号に応答して上昇させるステップ(26)をさらに含む、
請求項6から8のいずれか一項に記載の方法。
【請求項10】
前記目標回転数を上昇させる前記ステップ(26)を、前記駆動負荷が、予め決めた負荷閾値に到達したまたは上回ったとき、停止する、
請求項9に記載の方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、電動自転車の駆動アッセンブリを運転する方法、電動自転車の駆動アッセンブリおよび電動自転車に関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
電動自転車であって、駆動アッセンブリを備え、駆動アッセンブリは、運転者の人力の踏力を動力式にアシストする原動機モーメントを発生させる駆動ユニットと、複数の異なるギヤ段を有するギヤシフト機構と、を有する、電動自転車は、公知である。その際、自動のシフトプロセスを実施可能な、自動または半自動のギヤシフト機構も、公知である。その際、例えばチェーン式シフト機構であるとき、ギヤチェンジを停止状態でも可能とすべく、シフトプロセスの実施時、自動で電動自転車の駆動ユニットを操作することも公知である。この種の電動自転車は、特許文献1に示されている。
【先行技術文献】
【特許文献】
【0003】
独国特許出願公開第102013163号明細書
【発明の概要】
【0004】
請求項1の特徴を備える本発明に係る方法は、これに対して、特に簡単かつ効率的に電動自転車における自動のシフトプロセスが実施され得る点で優れている。特に、その際、特に低摩耗のかつ迅速なシフトが、簡単な手段により可能とされ得る。このことは、本発明により、電動自転車の駆動アッセンブリを運転する方法であって、駆動アッセンブリは、駆動ユニットと、制御可能に操作可能なギヤシフト機構と、を有し、
駆動ユニットの目下の駆動負荷を求めるステップと、
駆動ユニットの原動機回転数を、駆動負荷が予め決めた係合負荷に到達する係合回転数に、制御して上昇させるステップと、
ギヤシフト機構により最大で係合回転数での駆動ユニットの運転中に制御してシフトするステップと、
を含む、電動自転車の駆動アッセンブリを運転する方法により達成される。
【0005】
駆動負荷として、特にトルクおよび/または力を求める。
【0006】
好ましくは、駆動負荷として、駆動ユニットの原動機負荷、すなわち、特に、駆動ユニットの、目下発生される原動機モーメントを求める。原動機負荷は、直接、例えばセンサにより、または代替的には、測定される、駆動ユニットに供給され、流れている電流と、予め知られている原動機パラメータとから算出され得る。代替的または付加的に、好ましくは、駆動負荷として、被動要素、例えばチェーンリングにおける、かつ/または伝達要素、例えばチェーンにおける負荷が求められてもよい。さらに代替的または付加的に、好ましくは、駆動負荷として、電動自転車のパワートレーンの別のポイント、例えば後輪ハブに設けられたスプロケットセットにおける負荷が求められてもよい。
【0007】
好ましくは、目下の駆動負荷、特に、直接的に駆動ユニットにおいて発生される原動機負荷を求めるステップは、駆動ユニットの運転に基づく推定により実施される。好ましくは、駆動負荷は、駆動ユニットを操作する操作信号および/または操作電流に基づいて見積もられ得る。代替的または付加的に、好ましくは、目下の駆動負荷は、センサ、例えばトルクセンサおよび/または力センサにより求められてもよい。
【0008】
好ましくは、電動自転車のパワートレーンの異なるセクションにおける駆動負荷は、センサ信号から、かつ好ましくは、付加的に駆動ユニットおよびパワートレーンの数学的なモデルから求められ得る。特に、センサまたは検出方法として利用され得るのは、原動機モーメントの直接的な検出、例えばトルクセンサによる測定、および/または予め知られている原動機パラメータとともに、電流測定に基づく原動機モーメントの算出、駆動ユニットの検出したロータ位置信号である。
【0009】
係合負荷と見なされるのは、特に、電動自転車のパワートレーンを介した推進への駆動ユニットの係合を引き起こす最低負荷にとって特徴的なこの種の負荷である。すなわち、少なくとも係合負荷のとき、駆動ユニットの運転は、少なくとも部分的に電動自転車の推進を引き起こす。換言すれば、原動機回転数を、係合負荷に到達する係合回転数に上昇させることにより、駆動ユニットは、まさに、パワートレーンへの駆動ユニットの、トルクを伝達する機械的な係合が可能とされるような速さで回転される。
【0010】
換言すれば、本方法時、原動機回転数は、駆動ユニットが、パワートレーンの、トルクが伝達される経路に係合している状態に到達するまで、好ましくはインクリメンタルに、上昇させられる。換言すれば、駆動ユニットの運転は、原動機回転数を制御して上昇させることで、係合状態に寄せられるように実施される。シフトプロセスは、その際、制御してシフトすることで、最大でこの係合状態が存在している係合回転数時に実施される。すなわち、好ましくは、回転数が係合回転数より少なくとも僅かに小さいときに、シフトされる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
カート
15日前
個人
走行装置
29日前
個人
電動走行車両
29日前
個人
乗り物
2か月前
個人
閂式ハンドル錠
29日前
個人
折り畳み自転車
7か月前
個人
電動モビリティ
4か月前
個人
発音装置
4か月前
個人
自転車用傘捕捉具
8か月前
個人
自由方向乗車自転車
4か月前
個人
体重掛けリフト台車
8か月前
個人
キャンピングトライク
5か月前
個人
自転車用荷物台
8か月前
個人
アタッチメント
8か月前
株式会社CPM
駐輪機
9か月前
個人
ステアリングの操向部材
11か月前
個人
ステアリングの操向部材
6か月前
株式会社豊田自動織機
産業車両
1か月前
株式会社三五
リアサブフレーム
7か月前
三甲株式会社
台車
11か月前
個人
フロントフットブレーキ。
1か月前
三甲株式会社
台車
11か月前
ダイハツ工業株式会社
車両
9か月前
学校法人千葉工業大学
車両
7か月前
学校法人千葉工業大学
車両
7か月前
ヤマハ発動機株式会社
車両
9か月前
豊田合成株式会社
操舵装置
9か月前
ヤマハ発動機株式会社
車両
9か月前
ヤマハ発動機株式会社
車両
9か月前
ヤマハ発動機株式会社
車両
9か月前
個人
ホイールハブ駆動構造
1か月前
学校法人千葉工業大学
車両
7か月前
豊田鉄工株式会社
小型車両
12日前
コンビ株式会社
乳母車
3か月前
トヨタ自動車株式会社
パネル
1か月前
個人
走行車両等の粉塵飛散防止装置
29日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ