TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025101301
公報種別
公開特許公報(A)
公開日
2025-07-07
出願番号
2023218056
出願日
2023-12-25
発明の名称
監視装置、及び、方法
出願人
トヨタ自動車株式会社
代理人
弁理士法人明成国際特許事務所
主分類
B62D
65/18 20060101AFI20250630BHJP(鉄道以外の路面車両)
要約
【課題】車両の状態の変化に応じて車両の出力トルクを監視する。
【解決手段】監視装置は、無人運転により走行する車両を製造するために複数の工程が実施実行される工場において、前記複数の工程の対象である車両を監視する。監視装置は、前記車両について、前記複数の工程のうちの対象現在の工程に関する工程情報を取得する工程取得部と、前記対象の工程における、前記車両の出力トルクに関するトルク情報を取得するトルク取得部と、前記工程情報と、前記トルク情報と、を用いて、前記車両の前記出力トルクの異常を検出する検出部と、を備える。
【選択図】図2
特許請求の範囲
【請求項1】
無人運転により走行する車両を製造するために複数の工程が実施される工場において、前記複数の工程の対象である前記車両を監視する監視装置であって、
前記車両について、前記複数の工程のうちの対象の工程に関する工程情報を取得する工程取得部と、
前記対象の工程における、前記車両の出力トルクに関するトルク情報を取得するトルク取得部と、
前記工程情報と、前記トルク情報と、を用いて、前記車両の前記出力トルクの異常を検出する検出部と、
を備える、
監視装置。
続きを表示(約 1,100 文字)
【請求項2】
請求項1に記載の監視装置であって、
前記検出部は、
前記トルク情報が示す前記車両の前記出力トルクと、前記工程情報が示す工程と、前記工程に対応付けて設定されたトルクに関する基準とに基づいて、前記出力トルクの異常を検出する、
監視装置。
【請求項3】
請求項2に記載の監視装置であって、
前記トルクに関する基準として、前記工程における前記出力トルクの閾値が設定されており、
前記検出部は、前記出力トルクの値が、前記出力トルクの閾値よりも大きい場合に、前記車両の前記出力トルクに異常があると判定する、
監視装置。
【請求項4】
請求項3に記載の監視装置であって、
前記複数の工程のうちの第1工程について設定されている前記出力トルクの第1閾値として、前記第1工程より後に実施される第2工程について設定されている前記出力トルクの第2閾値より小さい値が設定されている、
監視装置。
【請求項5】
請求項2に記載の監視装置であって、
前記トルクに関する基準は、時系列で取得された前記出力トルクを表す波形に関する基準である、
監視装置。
【請求項6】
請求項1から5のいずれか一項に記載の監視装置であって、
前記車両の運転を遠隔制御するための制御指令を生成し、生成した前記制御指令を前記車両に送信する制御指令生成部、
をさらに備え、
前記検出部は、前記車両の前記出力トルクの異常を検出すると、前記出力トルクの異常を検出した旨を前記制御指令生成部に通知し、
前記制御指令生成部は、
前記出力トルクの異常を通知されると、前記車両を停止させるため、または、前記車両の走行速度を現在の速度より低速にするための前記制御指令を生成する、
監視装置。
【請求項7】
請求項1に記載の監視装置であって、
前記検出部が、前記車両の前記出力トルクの異常を検出した場合に、その旨を前記車両に対して通知する通知部、をさらに備える、
監視装置。
【請求項8】
無人運転により走行する車両を製造するために複数の工程が実施される工場において、前記複数の工程の対象である前記車両を監視する方法であって、
前記車両について、前記複数の工程のうちの対象の工程に関する工程情報を取得するステップと、
前記対象の工程における、前記車両の出力トルクを示すトルク情報を取得するステップと、
前記工程情報と、前記トルク情報と、を用いて、前記車両の前記出力トルクの異常を検出するステップと、
を含む方法。
発明の詳細な説明
【技術分野】
【0001】
本開示は、監視装置、及び、方法に関する。
続きを表示(約 3,300 文字)
【背景技術】
【0002】
特許文献1に記載された監視装置は、車両のトルクを監視する。
【先行技術文献】
【特許文献】
【0003】
特開2019-155951公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
車両を製造するための製造工程において、未完成状態の車両を遠隔制御または自律制御によって走行させながら、当該車両に対して部品を組み付けていく生産方法がある。
【0005】
このような技術においては、部品の組み付けに伴い車両の重量が変化する。ここで、車両の重量が変化すると、それに伴って車両の出力トルクの適切な大きさも変化する。そのため、このような技術においては、車両の重量の変化、更に言うと、車両の状態の変化に応じて車両の出力トルクを監視する必要がある。しかし、特許文献1に記載の技術は、車両の状態の変化を考慮しておらず、車両の状態の変化に応じて車両の出力トルクを監視することができなかった。
【課題を解決するための手段】
【0006】
本開示は、以下の形態として実現することが可能である。
【0007】
(1)本開示の第1形態によれば、無人運転により走行する車両を製造するために複数の工程が実施される工場において、前記複数の工程の対象である前記車両を監視する監視装置が提供される。この監視装置は、前記車両について、前記複数の工程のうちの対象の工程に関する工程情報を取得する工程取得部と、前記対象の工程における、前記車両の出力トルクに関するトルク情報を取得するトルク取得部と、前記工程情報と、前記トルク情報と、を用いて、前記車両の前記出力トルクの異常を検出する検出部と、を備える。
この形態によれば、工程情報とトルク情報とを用いて、車両の出力トルクの異常が検出される。未完成状態の車両を走行させながら部品を組み付けていく生産方法において、車両の状態の変化に応じて車両の出力トルクを監視できる。
(2)上記形態の監視装置において、前記検出部は、前記トルク情報が示す前記車両の前記出力トルクと、前記工程情報が示す工程と、前記工程に対応付けて設定されたトルクに関する基準とに基づいて、前記出力トルクの異常を検出してもよい。
この形態によれば、工程に対応付けて設定されたトルクに関する基準を用いて、出力トルクの異常を検出する。このため、未完成状態の車両を走行させながら部品を組み付けていく生産方法において、車両の状態の変化に応じて車両の出力トルクを監視できる。
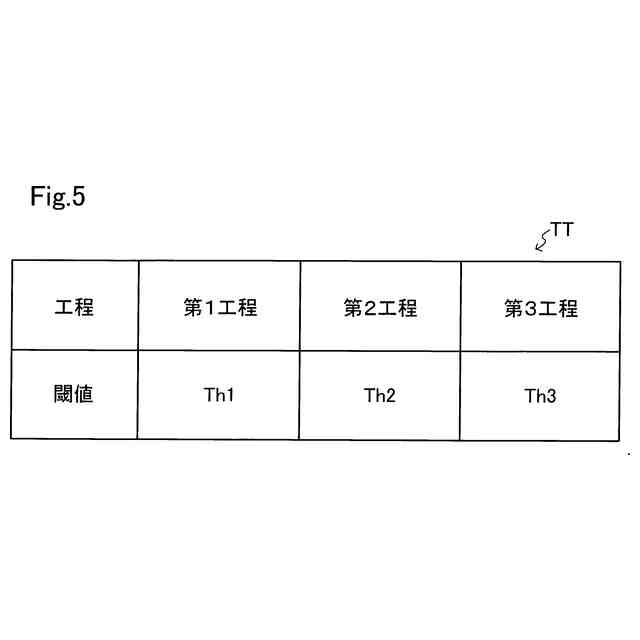
(3)上記形態の監視装置において、前記トルクに関する基準として、前記工程における前記出力トルクの閾値が設定されており、前記検出部は、前記出力トルクの値が、前記出力トルクの閾値よりも大きい場合に、前記車両の前記出力トルクに異常があると判定してもよい。
この形態によれば、工程ごとに設定されている出力トルクの閾値を用いて、出力トルクの異常を容易に検出できる。
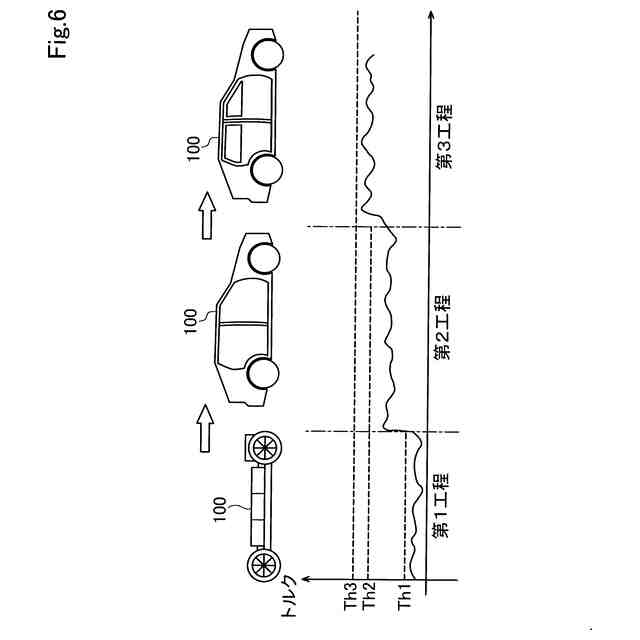
(4)上記形態の監視装置において、前記複数の工程のうちの第1工程について設定されている前記出力トルクの第1閾値として、前記第1工程より後に実施される第2工程について設定されている前記出力トルクの第2閾値より小さい値が設定されていてもよい。
未完成状体の車両に部品を組み付けていく生産方法においては、車両の重量が徐々に大きくなる。この形態によれば、後の工程における出力トルクの閾値を前の工程における閾値より大きくすることにより、出力トルクの異常を精度よく検出できる。
(5)上記形態の監視装置において、前記トルクに関する基準は、時系列で取得された前記出力トルクを表す波形に関する基準であってもよい。
この形態によれば、出力トルクの時系列変化を表す波形を用いて出力トルクの異常を容易に検出できる。
(6)上記形態の監視装置において、前記車両の運転を遠隔制御するための制御指令を生成し、生成した前記制御指令を前記車両に送信する制御指令生成部、をさらに備え、前記検出部は、前記車両の前記出力トルクの異常を検出すると、前記出力トルクの異常を検出した旨を前記制御指令生成部に通知し、前記制御指令生成部は、前記出力トルクの異常を通知されると、前記車両を停止させるため、または、前記車両の走行速度を現在の速度より低速にするための前記制御指令を生成してもよい。
この形態によれば、出力トルクの異常を検出した場合、車両を停止または低速で走行させることにより、車両の運転制御を適切に行うことができる。
(7)上記形態の監視装置において、前記検出部が、前記車両の前記出力トルクの異常を検出した場合に、その旨を前記車両に対して通知する通知部、をさらに備えてもよい。
この形態によれば、走行している車両において出力トルクの異常が発生した場合には、運転を停止させる等の車両の適切な運転制御に迅速に移行させることができる。
(8)本開示の第2形態によれば、無人運転により走行する車両を製造するために複数の工程が実施される工場において、前記複数の工程の対象である前記車両を監視する方法が提供される。この方法は、前記車両について、前記複数の工程のうちの対象の工程に関する工程情報を取得するステップと、前記対象の工程における、前記車両の出力トルクを示すトルク情報を取得するステップと、前記工程情報と、前記トルク情報と、を用いて、前記車両の前記出力トルクの異常を検出するステップと、を含む。
この形態によれば、工程情報とトルク情報とを用いて、車両の出力トルクの異常が検出される。未完成状態の車両を走行させながら部品を組み付けていく生産方法において、車両の状態の変化に応じて車両の出力トルクを監視できる。
【0008】
なお、本開示は、種々の形態で実現することが可能であり、例えば、遠隔操作システム、車両制御装置、遠隔自動運転方法、及び、車両の製造方法等の態様で実現することが可能である。
【図面の簡単な説明】
【0009】
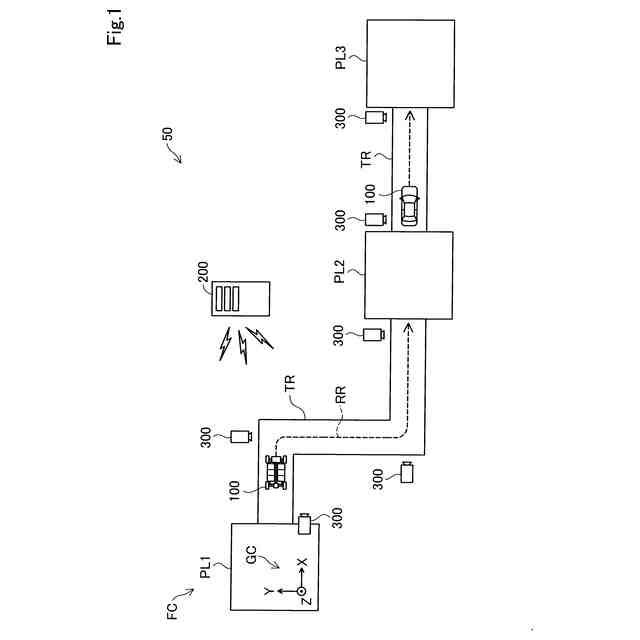
第1実施形態におけるシステムの構成を示す概念図である。
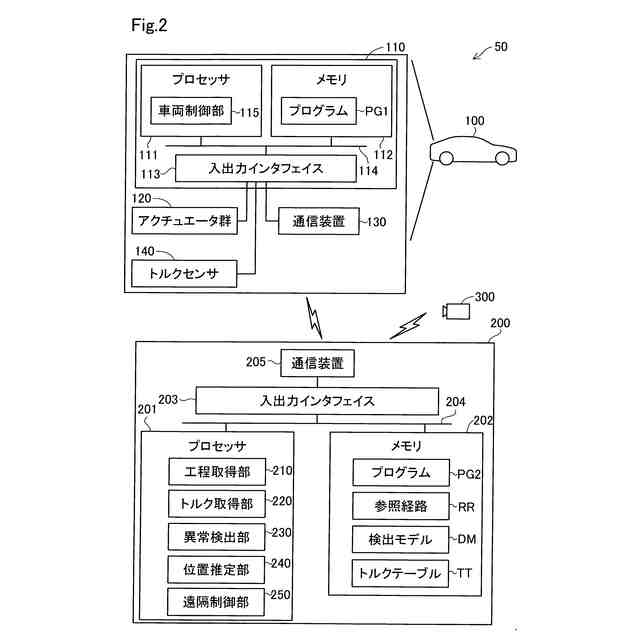
第1実施形態におけるシステムの構成を示すブロック図である。
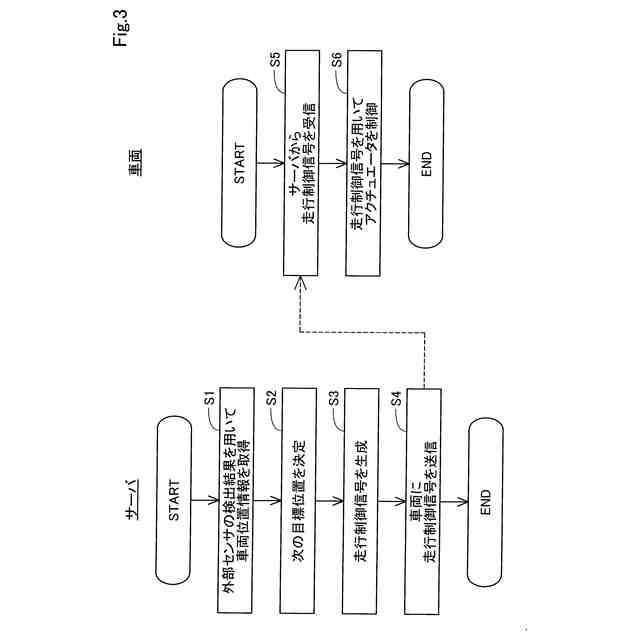
第1実施形態における車両の走行制御の処理手順を示すフローチャートである。
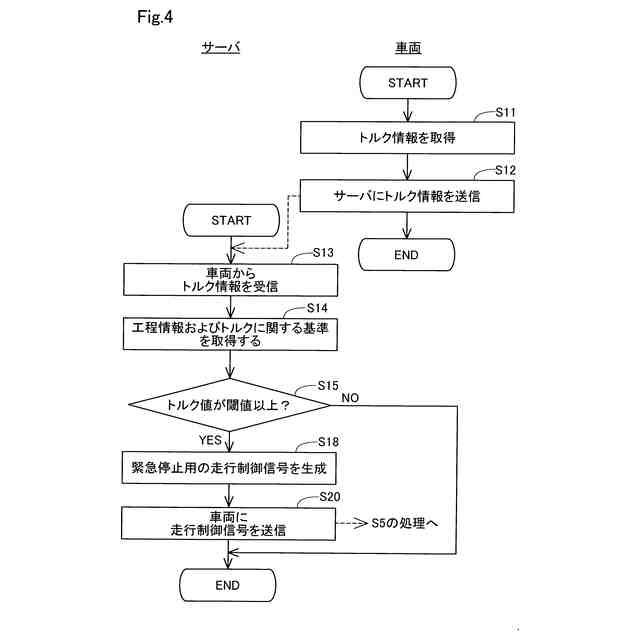
トルクの監視の処理手順を示すフローチャートである。
トルクテーブルを表す図である。
工程毎に閾値を設定する理由についての説明図である。
第2実施形態におけるトルクの監視の処理手順を示すフローチャートである。
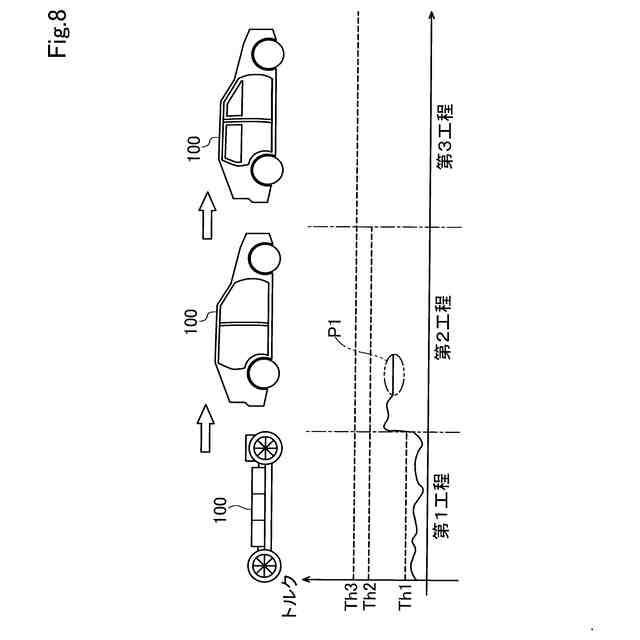
トルクの異常が発生している場合の波形の例を示す説明図である。
第3実施形態におけるトルクの監視の処理手順を示すフローチャートである。
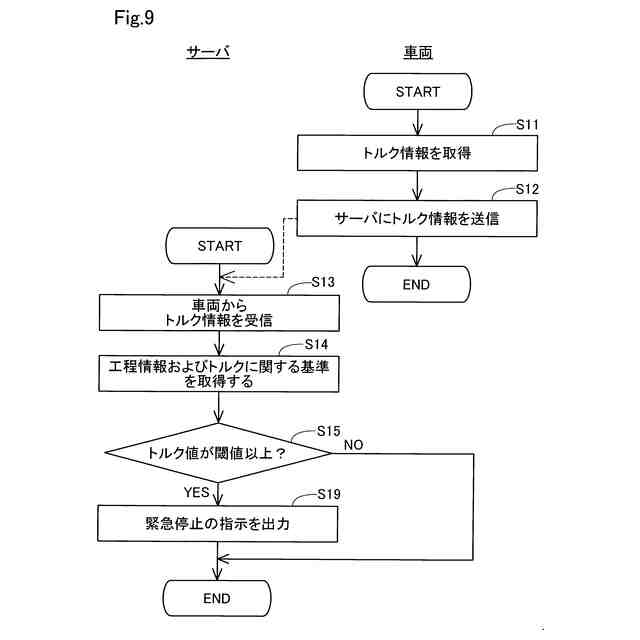
第4実施形態におけるシステムの概略構成を示す説明図である。
第4実施形態における車両の走行制御の処理手順を示すフローチャートである。
トルクの監視の処理手順を示すフローチャートである。
【発明を実施するための形態】
【0010】
A.第1実施形態:
図1は、第1実施形態におけるシステム50の構成を示す概念図である。システム50は、車両100を製造する工場FCにおいて用いられる。車両100は電気自動車(BEV:Battery Electric Vehicle)である。車両100は、工場FCで実施される複数の工程の対象である。システム50は、1以上の車両100と、サーバ200と、複数の外部センサ300とを備える。外部センサ300は、車両100を撮影するカメラである。なお、サーバ200を「監視装置」ともよぶ。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
カート
5日前
個人
走行装置
19日前
個人
電動走行車両
19日前
個人
乗り物
2か月前
個人
閂式ハンドル錠
19日前
個人
発音装置
4か月前
個人
折り畳み自転車
7か月前
個人
電動モビリティ
4か月前
個人
自転車用傘捕捉具
8か月前
個人
自転車用荷台
11か月前
個人
自由方向乗車自転車
4か月前
個人
体重掛けリフト台車
7か月前
個人
キャンピングトライク
5か月前
個人
自転車用荷物台
7か月前
個人
アタッチメント
8か月前
個人
ステアリングの操向部材
11か月前
個人
ステアリングの操向部材
5か月前
株式会社CPM
駐輪機
8か月前
三甲株式会社
台車
10か月前
株式会社豊田自動織機
産業車両
1か月前
個人
フロントフットブレーキ。
26日前
三甲株式会社
台車
10か月前
株式会社三五
リアサブフレーム
7か月前
豊田合成株式会社
操舵装置
8か月前
学校法人千葉工業大学
車両
6か月前
学校法人千葉工業大学
車両
6か月前
学校法人千葉工業大学
車両
6か月前
ダイハツ工業株式会社
車両
9か月前
ヤマハ発動機株式会社
車両
9か月前
ヤマハ発動機株式会社
車両
9か月前
個人
ホイールハブ駆動構造
1か月前
ヤマハ発動機株式会社
車両
9か月前
豊田鉄工株式会社
小型車両
2日前
ヤマハ発動機株式会社
車両
9か月前
株式会社カインズ
台車
7か月前
個人
走行車両等の粉塵飛散防止装置
19日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ