TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025099841
公報種別
公開特許公報(A)
公開日
2025-07-03
出願番号
2023216793
出願日
2023-12-22
発明の名称
荷役車両、荷役システム及び荷役プログラム
出願人
住友重機械搬送システム株式会社
,
住友ナコ フォ-クリフト株式会社
代理人
個人
,
個人
主分類
B66F
9/24 20060101AFI20250626BHJP(巻上装置;揚重装置;牽引装置)
要約
【課題】距離センサの異常を簡便に検出する。
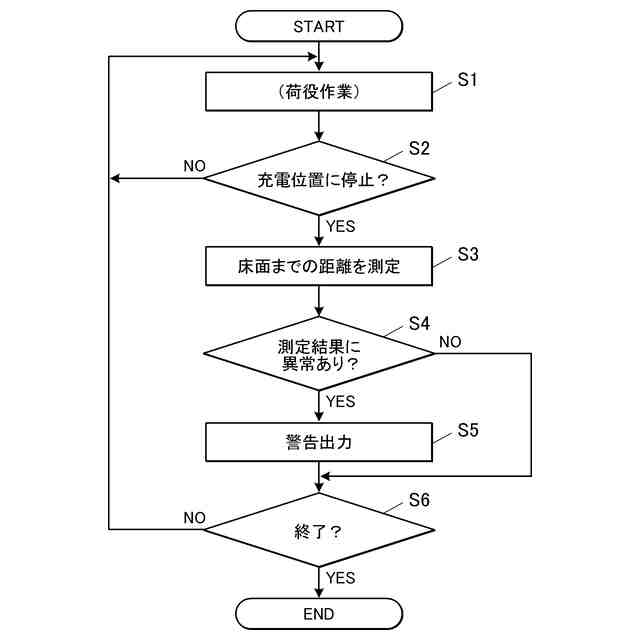
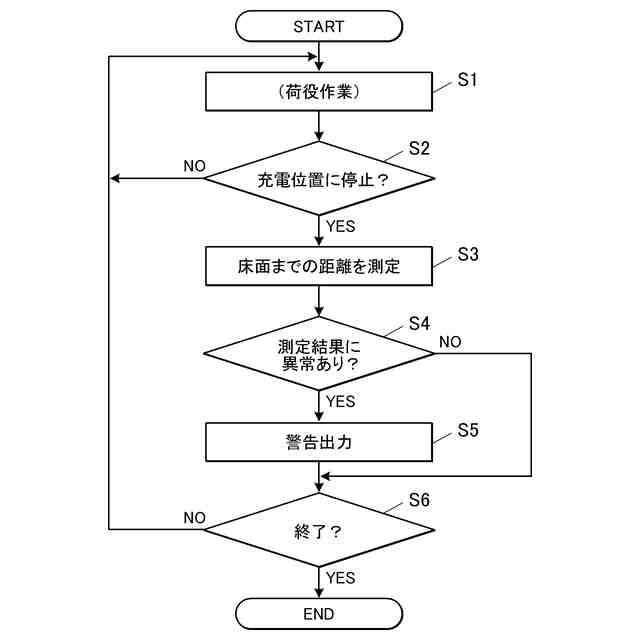
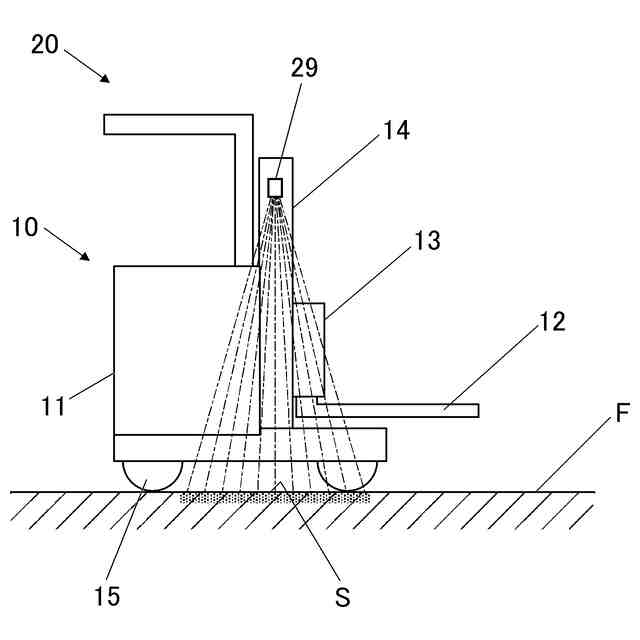
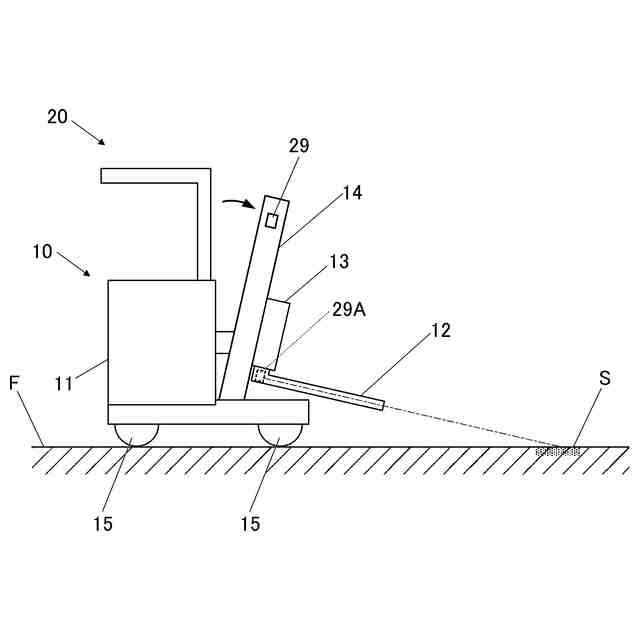
【解決手段】荷役車両20は、車体10に搭載されたレーザスキャナ(距離センサ)29と、制御部27と、を備えている。制御部27は、床面Fを対象面としてレーザスキャナ29による測定を行い、当該測定で取得した測定結果に基づいて、レーザスキャナ29が異常か否かを判定する。レーザスキャナ29との距離が常に一定である床面Fを対象面とすることで、当該レーザスキャナ29の異常を簡便に検出することができる。
【選択図】図3
特許請求の範囲
【請求項1】
車体に搭載された距離センサと、
床面を対象面として前記距離センサによる測定を行う測定部と、
前記測定部が取得した測定結果に基づいて、前記距離センサが異常か否かを判定する判定部と、
を備える荷役車両。
続きを表示(約 860 文字)
【請求項2】
前記測定部は、前記床面のうち所定の測定範囲に亘って測定を行い、
前記判定部は、前記測定部が取得した測定結果と、予め取得している基準値との差が、前記測定範囲の全てにおいて許容範囲内である場合に、前記距離センサは異常でないと判定する、
請求項1に記載の荷役車両。
【請求項3】
前記距離センサは光学センサであり、
前記測定部は、距離及び光量の少なくとも一方に係る情報を取得する、
請求項1に記載の荷役車両。
【請求項4】
前記距離センサは、前記車体の左右方向に直交する平面状の計測領域を有し、前記車体の側部に配置され、
前記測定部は、前記距離センサとその下方の床面との距離を測定する、
請求項1に記載の荷役車両。
【請求項5】
前記車体は、前方に突出し、かつ前後に傾動可能なフォークを備え、
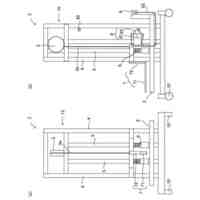
前記距離センサは、前記フォークに垂直な上下方向に直交する平面状の計測領域を有し、前記フォークと同じ高さに配置され、
前記測定部は、前記フォークを前傾させた状態で、前方の前記床面を対象面として前記距離センサと当該床面との距離を測定する、
請求項1に記載の荷役車両。
【請求項6】
請求項1に記載の荷役車両と、前記荷役車両と通信可能な管理部と、を備える荷役システムであって、
前記荷役車両は、無人で動作可能な無人車両であり、
前記管理部は、前記荷役車両が所定の待機位置に待機しているときに、前記距離センサが異常か否かを判定させる、
荷役システム。
【請求項7】
車体と、前記車体に搭載された距離センサと、を備える荷役車両のコンピュータを、
床面を対象面として前記距離センサによる測定を行う測定部、
前記測定部が取得した測定結果に基づいて、前記距離センサが異常か否かを判定する判定部、
として機能させる荷役プログラム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、荷役車両、荷役システム及び荷役プログラムに関する。
続きを表示(約 1,300 文字)
【背景技術】
【0002】
従来、荷役作業を行う無人搬送フォークリフト(AGF:Automated Guided Forklift)等の荷役車両が知られている。この種の荷役車両では、搭載した距離センサ(外界センサ)により周囲の情報を取得している(例えば、特許文献1参照)。
距離センサの異常を簡便に検出できると有用である。
【先行技術文献】
【特許文献】
【0003】
特開2023-163605号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
本発明は、上記事情に鑑みてなされたもので、距離センサの異常を簡便に検出することを目的とする。
【課題を解決するための手段】
【0005】
本発明に係る荷役車両は、
車体に搭載された距離センサと、
床面を対象面として前記距離センサによる測定を行う測定部と、
前記測定部が取得した測定結果に基づいて、前記距離センサが異常か否かを判定する判定部と、
を備える。
【発明の効果】
【0006】
本発明によれば、距離センサの異常を簡便に検出することができる。
【図面の簡単な説明】
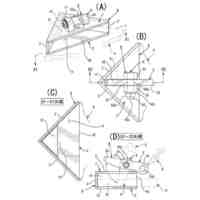
【0007】
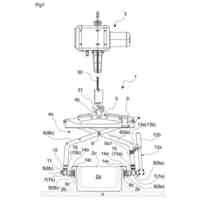
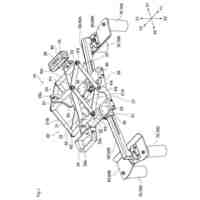
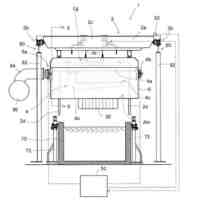
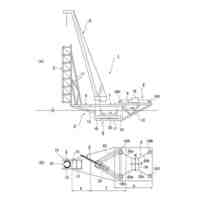
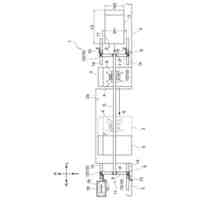
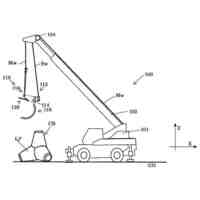
実施形態に係る荷役システムを示す図である。
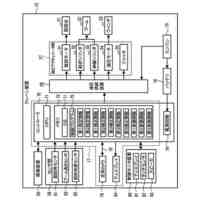
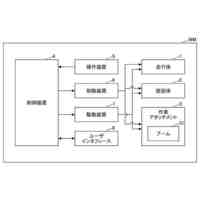
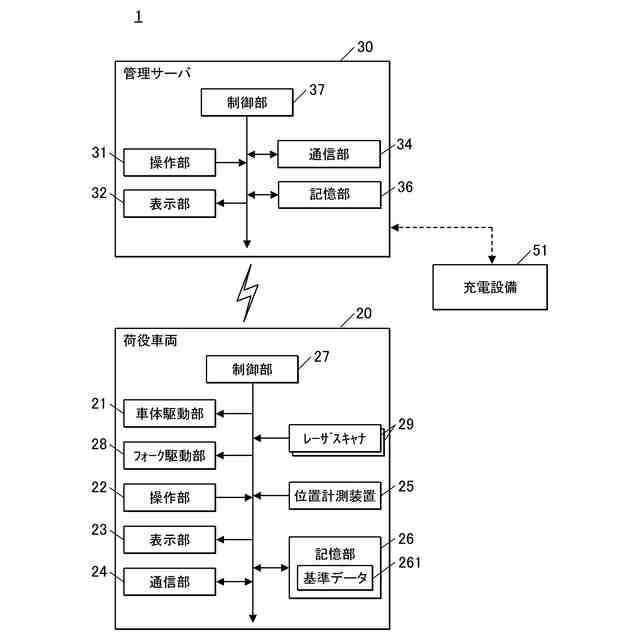
実施形態に係る荷役システムの概略の制御構成を示すブロック図である。
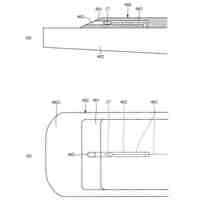
実施形態に係るセンサ異常検出処理の流れを示すフローチャートである。
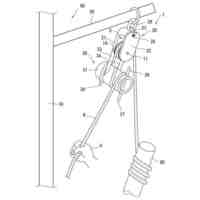
実施形態に係るセンサ異常検出処理を説明するための図である。
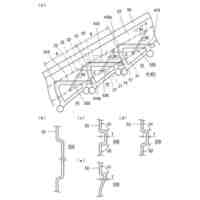
実施形態に係る距離センサの変形例を説明するための図である。
【発明を実施するための形態】
【0008】
以下、本発明の実施形態について、図面を参照して詳細に説明する。
【0009】
[荷役システムの構成]
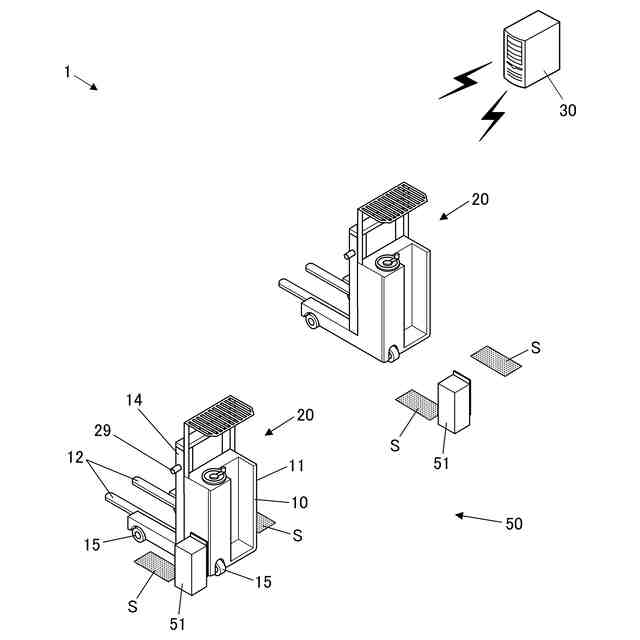
図1は、本実施形態に係る荷役システム1を示す図であり、図2は、荷役システム1の概略の制御構成を示すブロック図である。
これらの図に示すように、荷役システム1は、荷役車両20により作業エリアで所定の荷役作業(荷の積卸し、運搬、積付け、ピッキング、仕分け、荷揃え等の作業及びこれに付随する作業)を行うものである。荷役システム1は、例えば、WMS(Warehouse Management System:倉庫管理システム)、WES(Warehouse Execution System:倉庫運用管理システム)、WCS(Warehouse Control System:倉庫制御システム)等を含むシステムである。
【0010】
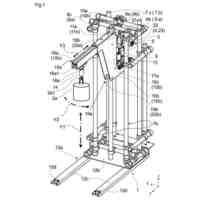
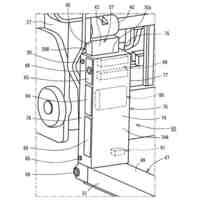
具体的に、荷役システム1は、少なくとも1台の荷役車両20と、管理サーバ30と、充電ステーション50とを含む。
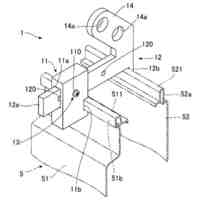
充電ステーション50は、作業エリア内又はその周辺に設けられ、充電設備51が設置されている。充電設備51は、荷役車両20と所定の状態で電気的に接続可能に構成され、荷役車両20に搭載されたバッテリ(図示省略)を充電する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
自走手摺
23日前
ユニパルス株式会社
吊具
2か月前
ユニパルス株式会社
荷役装置
7か月前
株式会社いうら
車椅子用昇降機
10日前
株式会社豊田自動織機
荷役車両
6か月前
水戸工業株式会社
吊り具
4か月前
ユニパルス株式会社
リフト装置
2か月前
ユニパルス株式会社
荷役助力装置
1か月前
白山工業株式会社
バランサ
4か月前
大栄産業株式会社
クランプ
2か月前
ユニパルス株式会社
荷役助力装置
2か月前
ユニパルス株式会社
荷役助力装置
3か月前
株式会社伊藤
滑り止め装置
5日前
株式会社キトー
タイヤ用吊具
3か月前
株式会社ユピテル
システム等
4か月前
新英運輸株式会社
自動車用台車
3か月前
株式会社豊田自動織機
フォークリフト
5か月前
株式会社五十鈴製作所
搬送装置
2か月前
フジテック株式会社
エレベータ
6か月前
フジテック株式会社
エスカレータ
4か月前
中坪造園有限会社
吊り荷降ろし具
2か月前
株式会社タダノ
クレーン装置
7か月前
大和ハウス工業株式会社
パネル吊具
1か月前
戸田建設株式会社
セミサブ型クレーン
6か月前
大成建設株式会社
エレベータシステム
6か月前
若築建設株式会社
姿勢制御装置
3か月前
フジテック株式会社
エレベータ
2か月前
大鉄工業株式会社
揚重機
7か月前
株式会社常磐ボーリング
吊り具
4か月前
日本車輌製造株式会社
建設機械
4か月前
日本車輌製造株式会社
建設機械
4か月前
フジテック株式会社
エスカレータ
6か月前
フジテック株式会社
エスカレータ
4か月前
住友重機械工業株式会社
作業機械
1か月前
鈴健興業株式会社
消波ブロック保持装置
2日前
大日本印刷株式会社
昇降補助装置
2か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ