TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025091603
公報種別
公開特許公報(A)
公開日
2025-06-19
出願番号
2023206933
出願日
2023-12-07
発明の名称
運搬装置及び運搬方法
出願人
東芝テック株式会社
代理人
弁理士法人鈴榮特許綜合事務所
主分類
B64U
20/87 20230101AFI20250612BHJP(航空機;飛行;宇宙工学)
要約
【課題】ドローンを用いたコンテナ箱の運搬に際し、コンテナ箱をホールド及びリリースする機構を低コストで実装することが可能であり、ドローンの小型化により狭い空間での利用が可能な運搬装置を提供すること。
【解決手段】実施形態の運搬装置は、定型サイズのコンテナ箱を飛行して運搬するように構成される。運搬装置は、飛行機構と、アームと、筐体とを含む。飛行機構は、浮力を発生させることが可能できる。アームは、開閉可能であり、爪部を有する。筐体は、飛行機構とアームとを支持する。アームの爪部は、アームが閉じた状態で、飛行中にコンテナ箱の底面をホールドし、着陸する過程においてコンテナ箱をリリースし、着陸後にコンテナ箱の底面との間に第1スペースが形成され、且つ着陸面との間に第2スペースが形成されるように構成される。
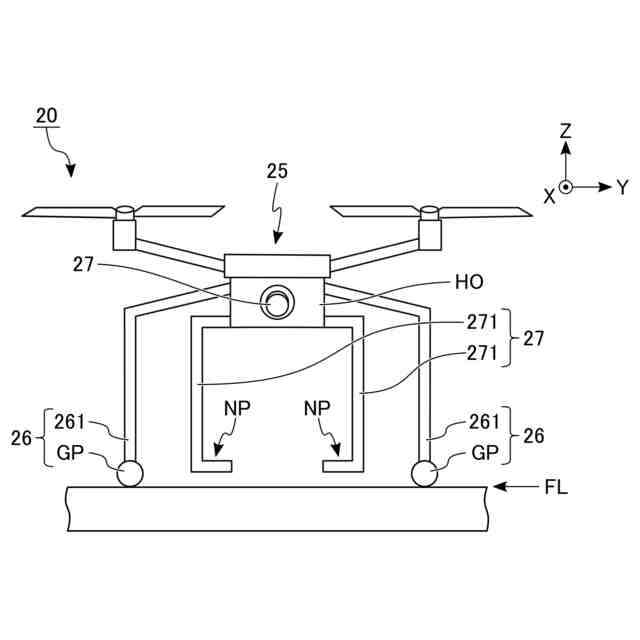
【選択図】図9
特許請求の範囲
【請求項1】
定型サイズのコンテナ箱を飛行して運搬するように構成された運搬装置であって、
浮力を発生させることが可能な飛行機構と、
爪部を有し、開閉可能なアームと、
前記飛行機構と前記アームとを支持する筐体と、を備え、
前記アームは、閉じた状態で、
飛行中に前記コンテナ箱の底面をホールドし、
着陸する過程において前記コンテナ箱をリリースし、
着陸後に前記コンテナ箱の底面との間に第1スペースが形成され、且つ着陸面との間に第2スペースが形成されるように構成された爪部を有する、
運搬装置。
続きを表示(約 1,000 文字)
【請求項2】
前記アームの前記爪部は、さらに、前記着陸後において、前記着陸面に接地する前記コンテナ箱の脚部によって前記着陸面と前記コンテナ箱の底面との間に形成されたスペースに挿入されるように構成される、
請求項1に記載の運搬装置。
【請求項3】
前記アームの前記爪部は、さらに、前記着陸後において、前記爪部の位置が前記着陸面の位置よりも低くなるように構成される、
請求項1に記載の運搬装置。
【請求項4】
前記飛行機構を制御するプロセッサと、
前記コンテナ箱に付加された第1位置シンボル及び第2位置シンボルを撮影できるカメラと、をさらに備え、
前記プロセッサは、さらに、前記着陸する過程において、前記カメラにより撮影された画像から、前記第1位置シンボルを認識すると、前記第1位置シンボルに基づいて着陸位置を調整し、前記第1位置シンボルを認識又は見失った状態で前記第2位置シンボルを認識すると、前記第2位置シンボルに基づいて着陸位置を調整するように構成される、
請求項1に記載の運搬装置。
【請求項5】
前記飛行機構と前記アームとのそれぞれを制御するプロセッサと、
前記コンテナ箱に付加されたバーコードを撮影できるカメラと、をさらに備え、
前記プロセッサは、さらに、前記コンテナ箱をピッキングする過程において、前記カメラにより撮影された画像から前記バーコードを認識すると、前記バーコードにより示された第1情報と、前記コンテナ箱の運送指示に含まれた第2情報とが一致するか否かを確認し、前記第1情報と前記第2情報とが一致する場合に、前記コンテナ箱の運送を開始するように構成される、
請求項1に記載の運搬装置。
【請求項6】
定型サイズのコンテナ箱を飛行して運搬するように構成され、浮力を発生させることが可能な飛行機構と、爪部を有し開閉可能なアームとを備える運搬装置を用いたコンテナ箱の運搬方法であって、
前記運搬装置に、前記アームを閉じた状態で、
飛行中に前記コンテナ箱の底面をホールドさせることと、
着陸する過程において前記コンテナ箱をリリースさせることと、
を備え、
前記運搬装置の着陸後に、前記爪部と前記コンテナ箱の底面との間に第1スペースが形成され、前記爪部と着陸面との間に第2スペースが形成される、
運搬方法。
発明の詳細な説明
【技術分野】
【0001】
実施形態は、運搬装置及び運搬方法に関する。
続きを表示(約 2,900 文字)
【背景技術】
【0002】
ドローンは、自律飛行が可能な無人飛行体である。ドローンの使用方法の一種は、例えば、倉庫内に保管されたコンテナ箱を運搬することである。このようなドローンは、人がピッキングのために倉庫内を巡回する作業を省略することができる。その結果、ドローンは、コンテナ箱の運搬に要する作業コストを抑制することができる。
【0003】
ドローンがコンテナ箱を運搬する際には、例えば、人が、コンテナ箱をドローンに装着する作業と、コンテナ箱をドローンから取り外す作業とのそれぞれを実行する。一方で、ドローン自身にコンテナ箱を掴む機構を設けることができるのであれば、ドローンは、人の作業を介することなく、コンテナ箱を運搬することができる。
【先行技術文献】
【特許文献】
【0004】
特開2018-165205号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、ドローン自身にコンテナ箱を掴む機構を設けることは、ドローンが高コストになる要因となり得る。また、コンテナ箱を掴む機構は、頑丈さが求められる。その結果、ドローンの総重量が増してしまう。総重量が増したドローンに対する浮力を補うためには、ドローンをさらに大型化しなければならなくなる。このような悪循環により大型化されたドローンは、屋内などの狭い空間で使いにくくなる。
【0006】
具体的には、ドローンは、コンテナ箱の底部をホールドするアームを備える場合、コンテナ箱のリリース動作を、アームにコンテナ箱の加重がかかった状態で実行する。この場合、コンテナ箱のリリース時に、摩擦力が、コンテナ箱とアームとの間で発生する。この摩擦力を打ち消してコンテナ箱をリリースするためには、頑丈なアーム構造と、十分なリリーストルクを発生させるためのパワー供給機構とが必要となる。このようなアーム構造とパワー供給機構とを備えるドローンは、重量増と大型化により、高コストになり、且つ屋内などの狭い空間で利用できなくなる。
【0007】
本発明は、上記の問題を解決するためになされたものであり、ドローンを用いたコンテナ箱の運搬に際し、コンテナ箱をホールド及びリリースする機構を低コストで実装することが可能であり、ドローンの小型化により狭い空間での利用が可能な運搬装置及び運搬方法を提供することを目的とする。
【課題を解決するための手段】
【0008】
実施形態の運搬装置は、定型サイズのコンテナ箱を飛行して運搬するように構成される。運搬装置は、飛行機構と、アームと、筐体とを含む。飛行機構は、浮力を発生させることが可能できる。アームは、開閉可能であり、爪部を有する。筐体は、飛行機構とアームとを支持する。アームの爪部は、アームが閉じた状態で、飛行中にコンテナ箱の底面をホールドし、着陸する過程においてコンテナ箱をリリースし、着陸後にコンテナ箱の底面との間に第1スペースが形成され、且つ着陸面との間に第2スペースが形成されるように構成される。
【図面の簡単な説明】
【0009】
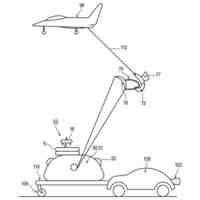
第1実施形態に係る運搬システムの全体構成の一例を示す概略図。
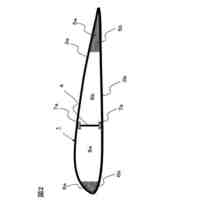
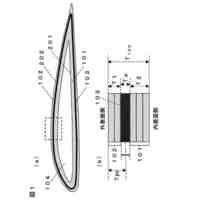
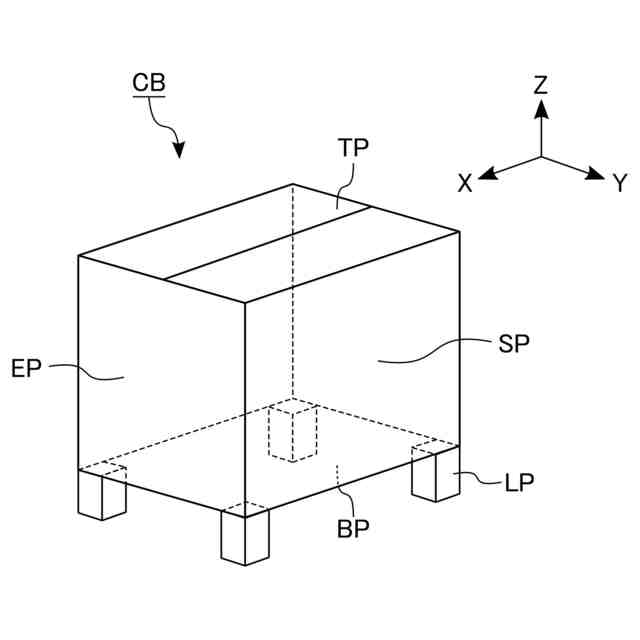
第1実施形態に係るコンテナ箱の形状の一例を示す斜視図。
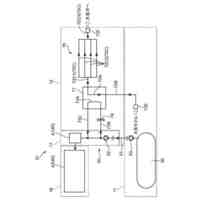
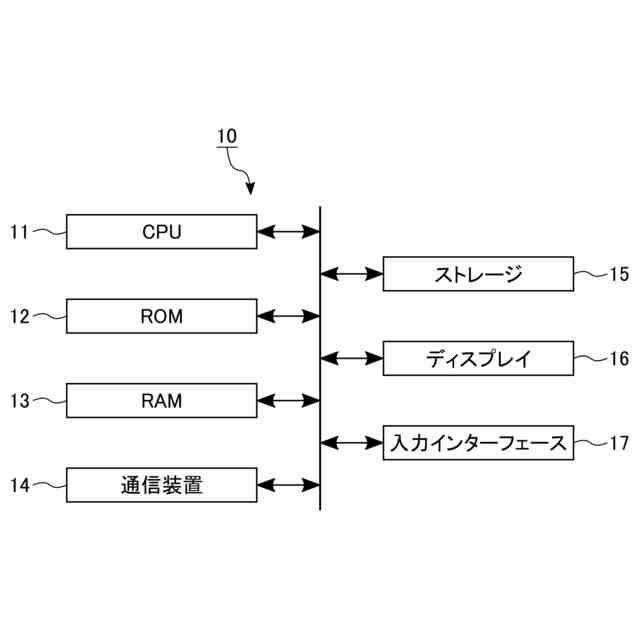
第1実施形態に係る管理装置のハードウェア構成の一例を示すブロック図。
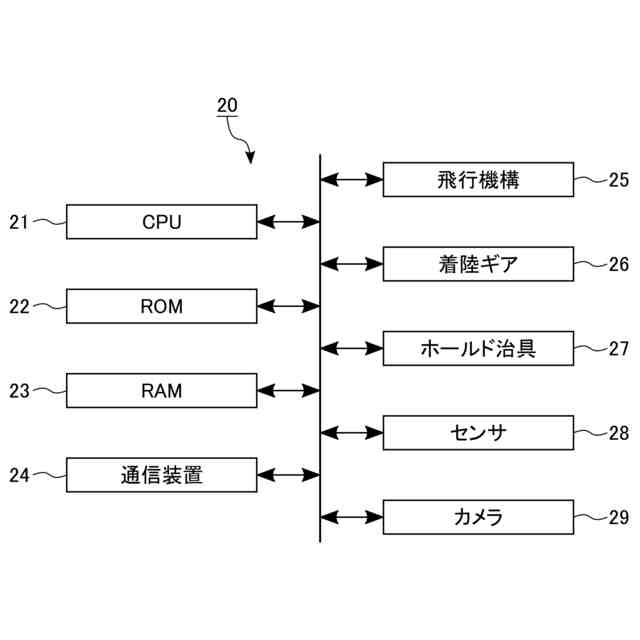
第1実施形態に係る運搬装置のハードウェア構成の一例を示すブロック図。
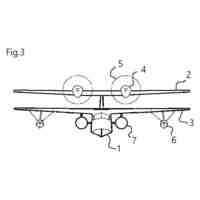
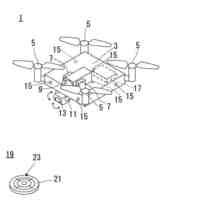
第1実施形態に係る運搬装置の外観の一例を示す正面図。
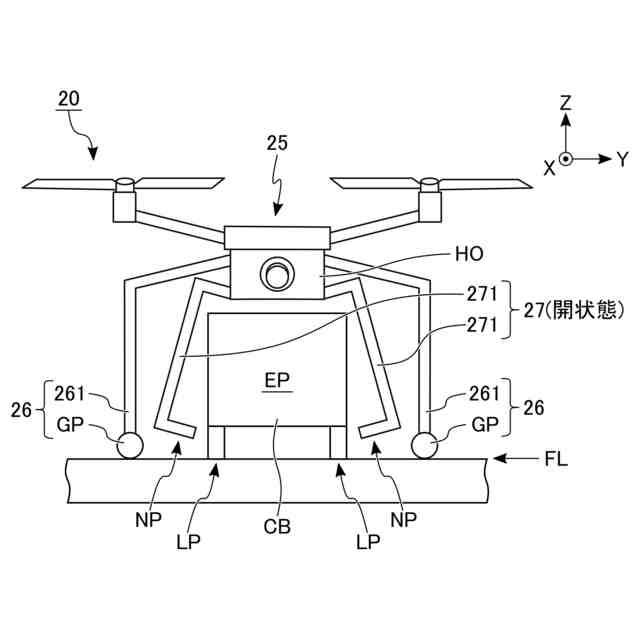
第1実施形態に係る運搬装置の着陸状態における開状態のホールド治具とコンテナ箱との関係性を示す正面図。
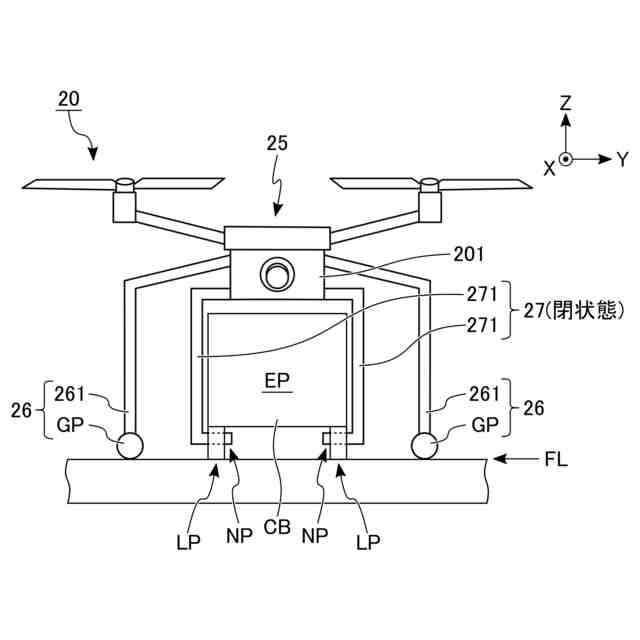
第1実施形態に係る運搬装置の着陸状態における閉状態のホールド治具とコンテナ箱との関係性を示す正面図。
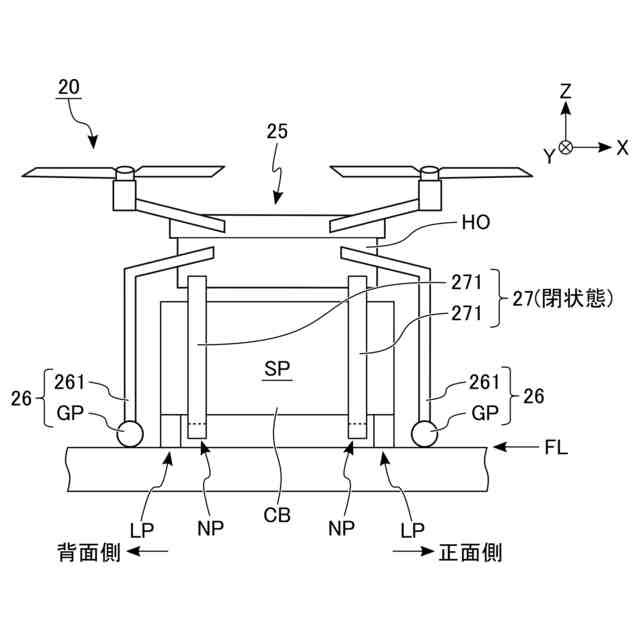
第1実施形態に係る運搬装置の着陸状態における閉状態のホールド治具とコンテナ箱との関係性を示す側面図。
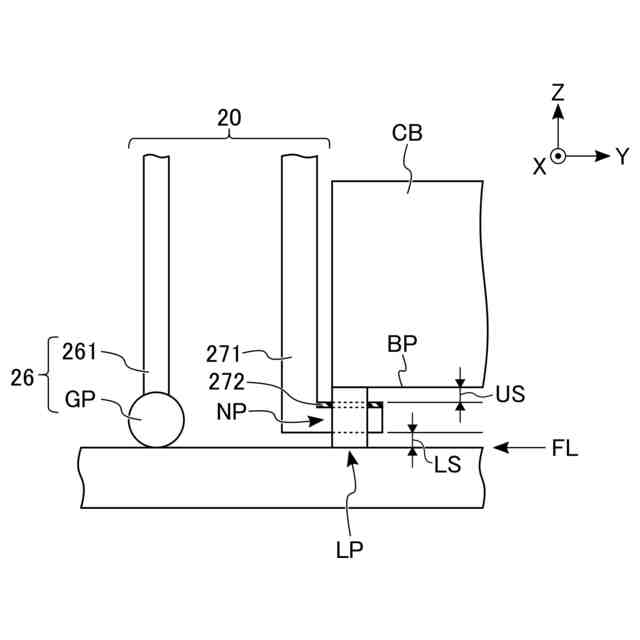
第1実施形態に係る運搬装置の着陸状態における閉状態のホールド治具とコンテナ箱との詳細な位置関係を示す正面図。
第1実施形態に係る運搬装置の飛行状態における閉状態のホールド治具とコンテナ箱との詳細な位置関係を示す正面図。
第2実施形態に係る運搬装置の外観の一例を示す正面図。
第2実施形態に係る運搬装置の着陸状態における開状態のホールド治具とコンテナ箱との関係性を示す正面図。
第2実施形態に係る運搬装置の着陸状態における開状態のホールド治具とコンテナ箱との関係性を示す正面図。
第2実施形態に係る運搬装置の着陸状態における閉状態のホールド治具とコンテナ箱との詳細な位置関係を示す正面図。
第2実施形態に係る運搬装置の飛行状態における閉状態のホールド治具とコンテナ箱との詳細な位置関係を示す正面図。
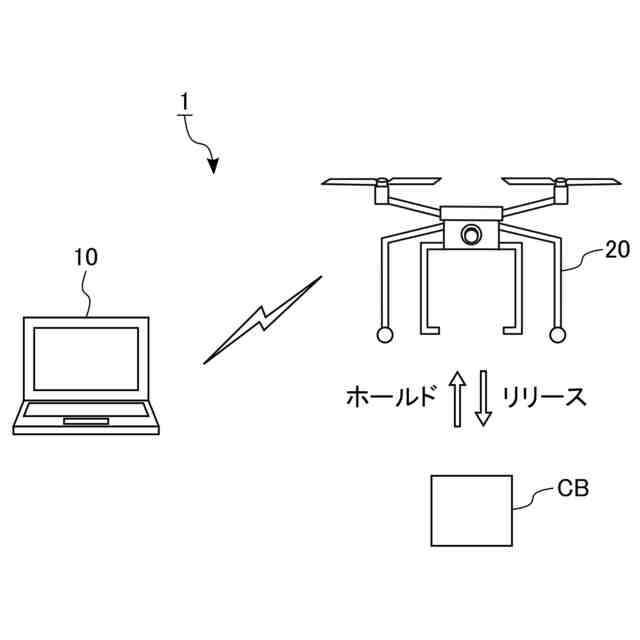
第3実施形態に係る運搬システムの利用方法の一例を示す概略図。
第3実施形態に係るコンテナ箱の天面の構成の一例を示す平面図。
第3実施形態に係る管理装置が備えるROMが記憶するプログラムの一例を示すブロック図。
第3実施形態に係る管理装置の機能構成の一例を示すブロック図。
第3実施形態に係る運搬装置が備えるROMが記憶するプログラムの一例を示すブロック図。
第3実施形態に係る運搬装置の機能構成の一例を示すブロック図。
第3実施形態に係る運搬装置の着陸シーケンスの一例を示すフローチャート。
第3実施形態に係る運搬装置の離陸シーケンスの一例を示すフローチャート。
第3実施形態に係る運搬装置の異常対処シーケンスの一例を示すフローチャート。
第1変形例に係るコンテナ箱の形状の一例を示す斜視図。
第1変形例に係る運搬装置の着陸状態における閉状態のホールド治具とコンテナ箱との関係性を示す側面図。
第2変形例に係るコンテナ箱の形状の一例を示す斜視図。
第2変形例に係る運搬装置の着陸状態における閉状態のホールド治具とコンテナ箱との関係性を示す側面図。
第2変形例に係る運搬装置の着陸状態における閉状態のホールド治具とコンテナ箱との詳細な位置関係を示す正面図。
第2変形例に係る運搬装置の飛行状態における閉状態のホールド治具とコンテナ箱との詳細な位置関係を示す正面図。
【発明を実施するための形態】
【0010】
以下に、各実施形態について図面を参照して説明する。各実施形態は、発明の技術的思想を具体化するための装置や方法を例示している。以下で参照される図面は、模式的又は概念的なものである。各図面に示された寸法や比率等は、必ずしも現実のものと同一とは限らない。本明細書において、同一の符号が付加された構成要素は、略同一の機能及び構成を有することを示している。本明細書では、コンテナ箱を運搬する機能を有するドローンのことを、“運搬装置”と呼ぶ。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
ドローン
3か月前
個人
着火ドローン
26日前
個人
救難消防飛行艇
1か月前
個人
ドローンシステム
5か月前
東レ株式会社
中空回転翼
5日前
個人
陸海空用の乗り物
2か月前
株式会社三圓
浮上装置
9か月前
個人
連続回転可能な飛行機翼
1か月前
個人
ドローンの計測操作方法3
9か月前
東レ株式会社
プロペラブレード
5日前
東レ株式会社
プロペラブレード
5日前
東レ株式会社
プロペラブレード
5日前
個人
ドローンの計測操作方法2
9か月前
個人
垂直離着陸機用エンジン改
4か月前
個人
飛行艇
11か月前
キヤノン電子株式会社
磁気トルカ
10か月前
個人
ドローンを自動離着陸する方法
5か月前
個人
ドローン消音装置
7か月前
個人
空中移動システム
6か月前
トヨタ自動車株式会社
ドローン
3か月前
個人
エアライナー全自動パラシュート
3か月前
個人
ヘリコプター駆動装置
20日前
株式会社ACSL
システム
3か月前
株式会社小糸製作所
飛行体ポート
1か月前
個人
搬送方法および搬送システム
22日前
株式会社ACSL
システム
3か月前
合同会社アドエア
パラシュート射出装置
3か月前
合同会社アドエア
飛行体の落下補助装置
6か月前
株式会社SUBARU
移動体
6か月前
全日本空輸株式会社
ドーリシステム
8か月前
個人
垂直離着陸機用ガスタービンエンジン
5か月前
個人
飛行体
5日前
個人
パラボラ型スペースデブリカタパルト
15日前
ミネベアミツミ株式会社
無人機
3か月前
川崎重工業株式会社
水素航空機
1か月前
管清工業株式会社
地中管内の調査装置
1か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ