TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025086172
公報種別
公開特許公報(A)
公開日
2025-06-06
出願番号
2023200055
出願日
2023-11-27
発明の名称
搬送ロボット制御システム及び搬送ロボット制御方法
出願人
株式会社日立製作所
代理人
弁理士法人サンネクスト国際特許事務所
主分類
B65G
1/137 20060101AFI20250530BHJP(運搬;包装;貯蔵;薄板状または線条材料の取扱い)
要約
【課題】仕分作業の作業手待ちを低減する。
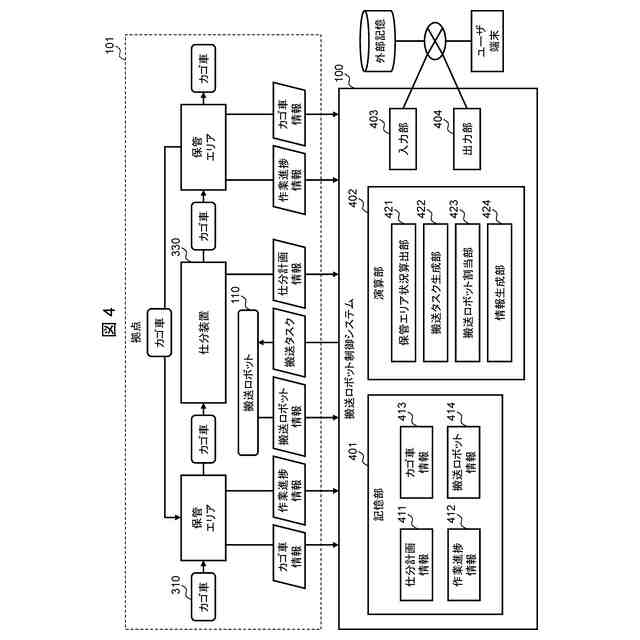
【解決手段】拠点における複数の保管エリアは、仕分け前の物品が配置される第一保管エリアと、配送方面に応じて仕分け後の物品が配置される第二保管エリアとを含む。搬送ロボット制御システムは、少なくとも第一保管エリア及び第二保管エリアである2つ以上の保管エリアの各々について、現在又は将来の時刻での物品量を特定し、当該2つ以上の保管エリアの各々について特定された物品量を基に、保管エリア間での物品の搬送のタスク搬送タスクを生成し、生成された搬送タスクを搬送ロボットに割り当て、搬送指示(生成された搬送タスクが関連付けられた制御情報であり当該搬送タスクが割り当てられた搬送ロボットへの制御情報)を送信する。
【選択図】図4
特許請求の範囲
【請求項1】
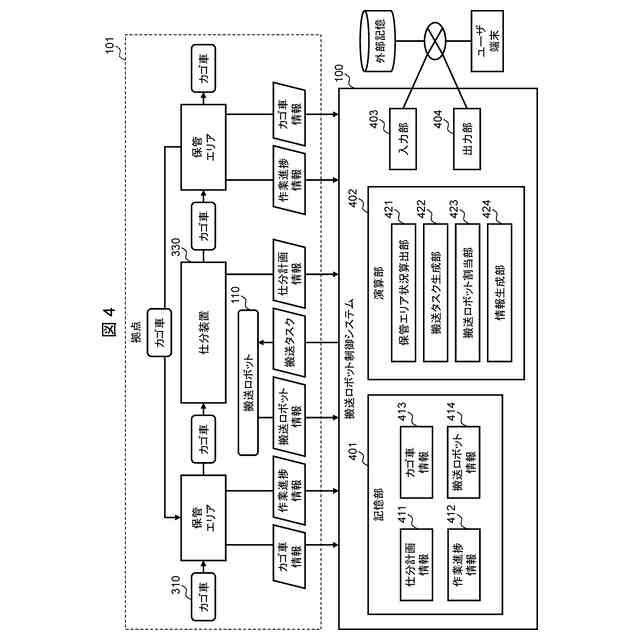
仕分情報及び物品情報の少なくとも前記物品情報に基づいて、拠点における保管エリア間での物品の搬送のタスクである搬送タスクを生成する搬送タスク生成部と、
生成された搬送タスクを、保管エリア間を走行する搬送ロボットに割り当てる搬送ロボット割当部と、
生成された搬送タスクが関連付けられた制御情報であり当該搬送タスクが割り当てられた搬送ロボットへの制御情報である搬送指示を送信する情報生成部と
を備え、
前記仕分情報は、配送方面の異なる複数の物品を配送方面毎に仕分ける仕分装置の仕分作業に関する情報であり、
前記物品情報は、複数の保管エリアに配置された仕分け前又は仕分け後の物品と、前記仕分装置において仕分作業中の物品とを含む複数の物品に関する情報であり、
前記複数の保管エリアは、仕分け前の物品が配置される1又は複数の第一保管エリアと、配送方面に応じて仕分け後の物品が配置される1つ又は複数の第二保管エリアとを含み、
前記搬送タスク生成部は、
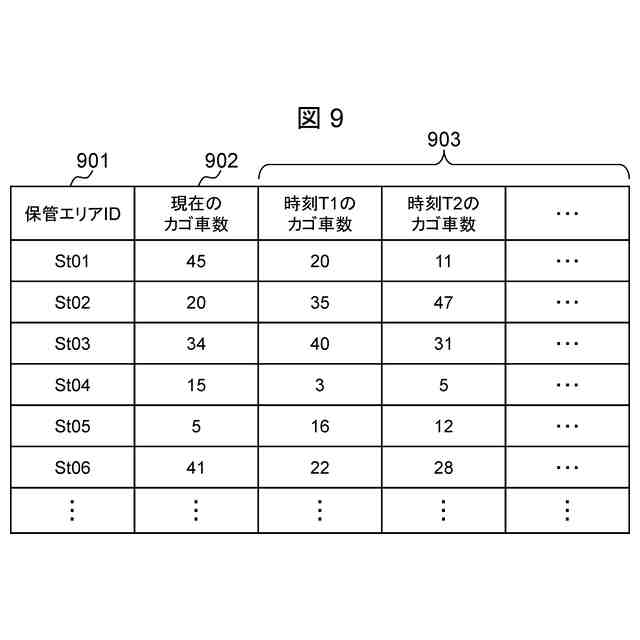
少なくとも前記物品情報に基づいて、前記複数の保管エリアのうちの少なくとも第一保管エリア及び第二保管エリアである2つ以上の保管エリアの各々について、現在又は将来の時刻での物品量を特定し、
前記2つ以上の保管エリアの各々について特定された物品量を基に、1又は複数の搬送タスクを生成する、
搬送ロボット制御システム。
続きを表示(約 2,700 文字)
【請求項2】
前記2つ以上の保管エリアの各々について下記(a)及び(b)のいずれも回避するように、前記搬送タスク生成部が前記1又は複数のタスクを生成し、前記搬送ロボット割当部が搬送タスクを搬送ロボットに割り当て、前記情報生成部が、搬送タスクが関連付けられた搬送指示を送信し、
(a)当該保管エリアにおける物品量が当該保管エリアについての第一閾値以下になる、
(b)当該保管エリアにおける物品量が当該保管エリアについての第二閾値以上になる、
前記第二閾値は前記第一閾値より大きい、
請求項1に記載の搬送ロボット制御システム。
【請求項3】
前記1又は複数の搬送タスクの各々では、物品又は物品の搬送物である搬送対象と、搬送元保管エリアと、搬送先保管エリアと、搬送が開始される最も遅い日時である搬送開始日時とが定義されており、
前記情報生成部が、
搬送タスクが関連付けられた搬送指示を、当該搬送タスクにおいて定義されている搬送開始日時よりも前に送信する、又は、
当該搬送タスクにおいて定義されている搬送開始日時と同じかそれよりも前の日時を搬送実行日時として関連付けた搬送指示を送信する、
請求項2に記載の搬送ロボット制御システム。
【請求項4】
前記1又は複数の搬送タスクの各々では、物品又は物品の搬送物である搬送対象と、搬送元保管エリアと、搬送先保管エリアと、搬送が開始される最も遅い日時である搬送開始日時とが定義されており、
前記搬送ロボット割当部が、搬送タスクを、下記の(x)又は(y)の搬送ロボットに割り当てる、
(x)搬送開始日時において搬送元保管エリアに最も近い位置にいる搬送ロボット、
(y)搬送開始日時において搬送元保管エリアから一定の距離内にいる搬送ロボットのうち、搬送負荷が最も小さい搬送ロボット、
請求項2に記載の搬送ロボット制御システム。
【請求項5】
前記2つ以上の保管エリアの各々について、当該保管エリアの将来の時刻における予測される物品量は、当該保管エリアの現在の時刻での物品量に、当該将来の時刻までに当該保管エリアに入ると予測される物品量を加算し、且つ、当該将来の時刻までに当該保管エリアから出ると予測される物品量を減算した値である、
請求項2に記載の搬送ロボット制御システム。
【請求項6】
前記拠点又は前記拠点における搬送コースについて、生成された搬送タスクの数が搬送ロボット上限数を超過する場合、
前記搬送タスク生成部が、前記複数の搬送タスクの各々に優先順位を設定し、
搬送タスクの優先順位は、当該搬送タスクでの搬送対象が、前記仕分装置が有する複数のシュートのうち物品量が相対的に多いシュートからの物品を含む場合、又は、当該搬送タスクでの搬送対象に対応の出荷日時が相対的に早い場合、高い優先順位であり、
前記搬送ロボット割当部が、当該搬送ロボット上限数以下の優先順位が高い搬送タスクをそれぞれ搬送ロボットに割り当てる、
請求項2に記載の搬送ロボット制御システム。
【請求項7】
将来の時刻での予測された物品量と実際の当該時刻での物品量との乖離が一定値以上に大きい保管エリアが一定割合以上存在する場合、前記搬送タスク生成部は、生成済であるが未実施である搬送タスクをキャンセルし、当該乖離の大きさに基づき、新たな将来の時刻での物品量を前記2つ以上の保管エリアの各々について特定し、新たに搬送タスクを生成する、
請求項2に記載の搬送ロボット制御システム。
【請求項8】
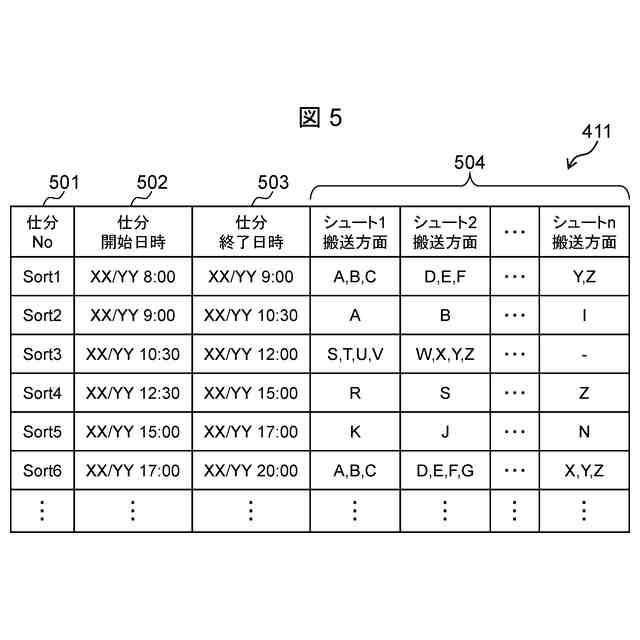
前記仕分情報は、
仕分の開始及び終了の日時と前記仕分装置が有するシュート毎に当該シュートに割り当てられた方面とが仕分毎に定義された仕分計画を表す仕分計画情報と、
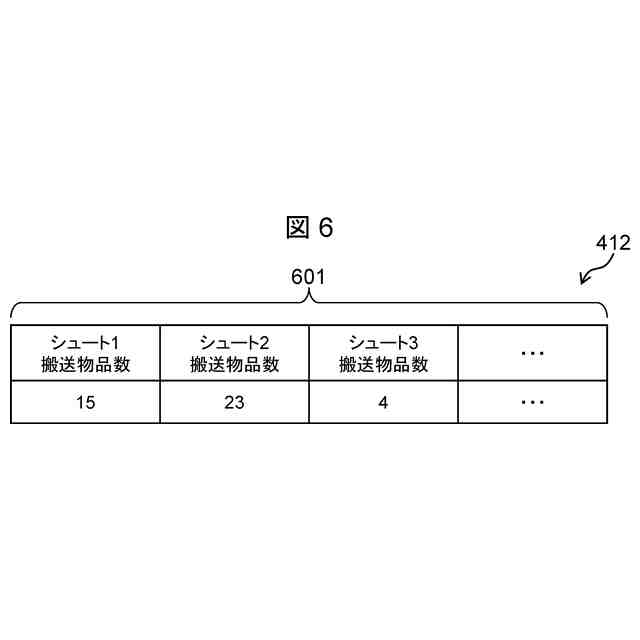
前記仕分装置が有するシュート毎に排出された物品の量を表す作業進捗情報と
を含み、
前記搬送タスク生成部は、前記物品情報の他に前記仕分情報に基づいて、前記2つ以上の保管エリアの各々について、将来の時刻での物品量を特定する、
請求項2に記載の搬送ロボット制御システム。
【請求項9】
出力画面を出力する出力部を更に備え、
前記情報生成部は、実施中の搬送タスク及び保管エリア毎の特定された物品量に基づき前記出力画面のための情報を生成し、
前記出力画面は、当該生成された情報に基づく画面であり、下記の全てを有する、
・前記複数の保管エリアの各々を表すオブジェクト、
・前記複数の保管エリアの各々について、当該保管エリアでの物品量を表す数値、
・複数の保管エリア間である複数の搬送コースの各々を表すオブジェクト、
・前記複数の搬送コースの各々について、当該搬送コースにおいて搬送中の物品量を表す数値、
請求項1に記載の搬送ロボット制御システム。
【請求項10】
以下の(A)乃至(C)をコンピュータにより行い、
(A)仕分情報及び物品情報の少なくとも前記物品情報に基づいて、拠点における保管エリア間での物品の搬送のタスクである搬送タスクを生成する、
(B)生成された搬送タスクを、保管エリア間を走行する搬送ロボットに割り当てる、
(C)生成された搬送タスクが関連付けられた制御情報であり当該搬送タスクが割り当てられた搬送ロボットへの制御情報である搬送指示を送信する、
前記仕分情報は、配送方面の異なる複数の物品を配送方面毎に仕分ける仕分装置の仕分作業に関する情報であり、
前記物品情報は、複数の保管エリアに配置された仕分け前又は仕分け後の物品と、前記仕分装置において仕分作業中の物品とを含む複数の物品に関する情報であり、
前記複数の保管エリアは、仕分け前の物品が配置される1又は複数の第一保管エリアと、配送方面に応じて仕分け後の物品が配置される1つ又は複数の第二保管エリアとを含み、
(A)において、コンピュータにより、
少なくとも前記物品情報に基づいて、前記複数の保管エリアのうちの少なくとも第一保管エリア及び第二保管エリアである2つ以上の保管エリアの各々について、現在又は将来の時刻での物品量を特定し、
前記2つ以上の保管エリアの各々について特定された物品量を基に、1又は複数の搬送タスクを生成する、
搬送ロボット制御方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、概して、入荷した物品を方面毎に仕分けて出荷する物流業務を支援する技術に関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
大規模な物流網では、物品の集荷、仕分、及び輸送が複数の拠点で行われ、最終的な方面に物品が輸送される。
【0003】
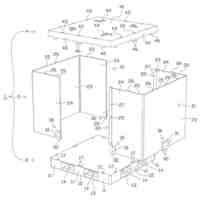
一般に、拠点では仕分装置を用いて物品が配送方面毎に仕分けられており、物品はカゴ車(カゴ付きの車)に積載され、そのカゴ車が搬送ロボットにより当該拠点内の目的地に搬送される。拠点のスループットの向上等を実現するための搬送ロボットの制御方法として、例えば、特許文献1に記載の技術が知られている。
【先行技術文献】
【特許文献】
【0004】
特開2022-180082号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
仕分作業が行われる拠点(例えば物流倉庫)では、複数の搬送ロボットがそれぞれ当該搬送ロボットに割り当てられた搬送タスク(例えばどの搬送物を何処から何処へ搬送するか)に応じてカゴ車を搬送する。
【0006】
仕分作業場において、仕分け対象の物品を積載したカゴ車、または仕分けた物品を積載するための空カゴ車が枯渇していると、仕分作業の作業手待ちとして、仕分け対象の物品を積載したカゴ車、または仕分けた物品を積載するための空カゴ車の到着待ちが発生する。また、仕分作業場において、仕分対象の物品を積載したカゴ車、または仕分け済の物品を積載したカゴ車、または仕分けた物品を積載するための空カゴ車が其々のカゴ車を保管する保管エリアの容量を超過していると、保管エリアからカゴ車を搬送(搬出)して保管エリアの空きができるまで、次のカゴ車を当該保管エリアに保管(搬入)できない。故に、仕分作業の作業手待ちとして、保管エリアの空き待ち(カゴ車の搬送待ち)が発生する。
【0007】
このような課題は、カゴ車以外の搬送物に物品が積載される場合、或いは、台車無しに物品が搬送ロボットにより搬送される場合にも生じ得る。
【0008】
本発明は、仕分作業の作業手待ちを低減することを目的とする。
【課題を解決するための手段】
【0009】
本願において開示される発明の代表的な一例を示せば以下の通りである。すなわち、搬送ロボット制御システムは、仕分情報及び物品情報の少なくとも物品情報に基づいて、拠点における保管エリア間での物品の搬送のタスクである搬送タスクを生成する。当該システムは、生成された搬送タスクを、保管エリア間を走行する搬送ロボットに割り当て、搬送指示(生成された搬送タスクが関連付けられた制御情報であり当該搬送タスクが割り当てられた搬送ロボットへの制御情報)を送信する。仕分情報は、配送方面の異なる複数の物品を配送方面毎に仕分ける仕分装置の仕分作業に関する情報である。物品情報は、複数の保管エリアに配置された仕分け前又は仕分け後の物品と、仕分装置において仕分作業中の物品とを含む複数の物品に関する情報である。複数の保管エリアは、仕分け前の物品が配置される1又は複数の第一保管エリアと、配送方面に応じて仕分け後の物品が配置される1つ又は複数の第二保管エリアとを含む。当該システムは、少なくとも物品情報に基づいて、複数の保管エリアのうちの少なくとも第一保管エリア及び第二保管エリアである2つ以上の保管エリアの各々について、現在又は将来の時刻での物品量を特定し、当該2つ以上の保管エリアの各々について特定された物品量を基に、1又は複数の搬送タスクを生成する。
【発明の効果】
【0010】
本発明によれば、仕分作業の作業手待ちを低減することができる。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
箱
8か月前
個人
ゴミ箱
7か月前
個人
包装体
8か月前
個人
コンベア
16日前
個人
段ボール箱
2か月前
個人
容器
4か月前
個人
ゴミ収集器
2か月前
個人
段ボール箱
2か月前
個人
物品収納具
11か月前
個人
折り畳み水槽
8か月前
個人
角筒状構造体
26日前
個人
宅配システム
2か月前
個人
パウチ補助具
7か月前
個人
楽ちんハンド
9日前
個人
土嚢運搬器具
3か月前
個人
お薬の締結装置
1か月前
個人
コード類収納具
3か月前
個人
閉塞装置
5か月前
個人
ダンボール宝箱
8か月前
個人
圧縮収納袋
8か月前
個人
ゴミ処理機
4か月前
株式会社和気
包装用箱
4か月前
株式会社コロナ
梱包材
26日前
個人
貯蔵サイロ
2か月前
個人
塗料容器用蓋
8か月前
個人
袋入り即席麺
2か月前
三甲株式会社
容器
11か月前
個人
輸送積荷用動吸振器
1か月前
三甲株式会社
蓋体
3か月前
三甲株式会社
容器
10か月前
株式会社イシダ
包装装置
8か月前
積水樹脂株式会社
接着剤
7か月前
個人
包装箱
5か月前
株式会社新弘
容器
7か月前
株式会社新弘
容器
7か月前
個人
粘着テープ剥がし具
9か月前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ