TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025085424
公報種別
公開特許公報(A)
公開日
2025-06-05
出願番号
2023199296
出願日
2023-11-24
発明の名称
ワーク管理システム
出願人
三機工業株式会社
代理人
弁理士法人高田・高橋国際特許事務所
主分類
B65G
47/248 20060101AFI20250529BHJP(運搬;包装;貯蔵;薄板状または線条材料の取扱い)
要約
【課題】保管棚にワークを効率よく収納することができるワーク管理システムを提供する。
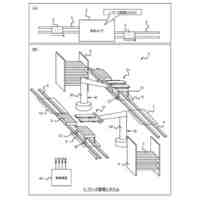
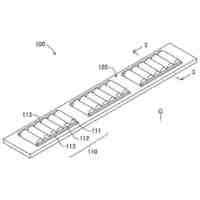
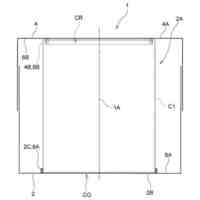
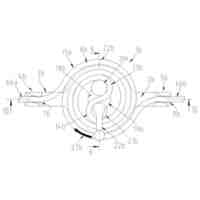
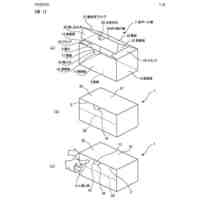
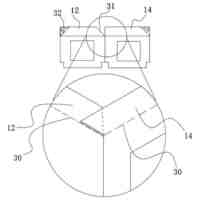
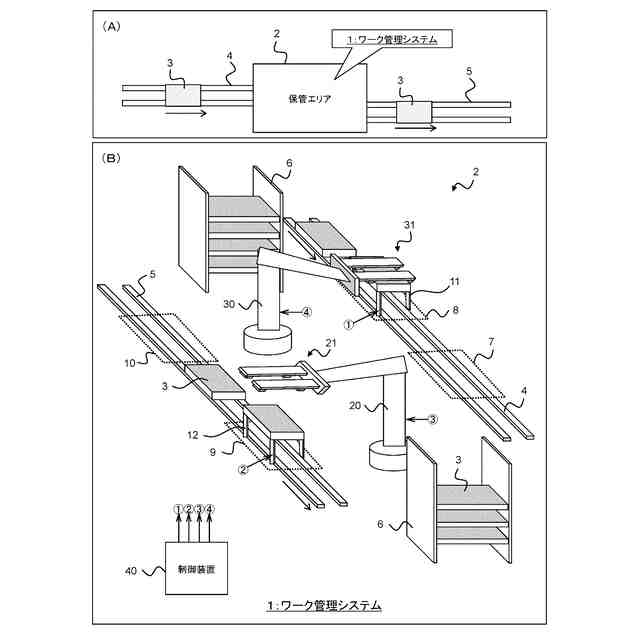
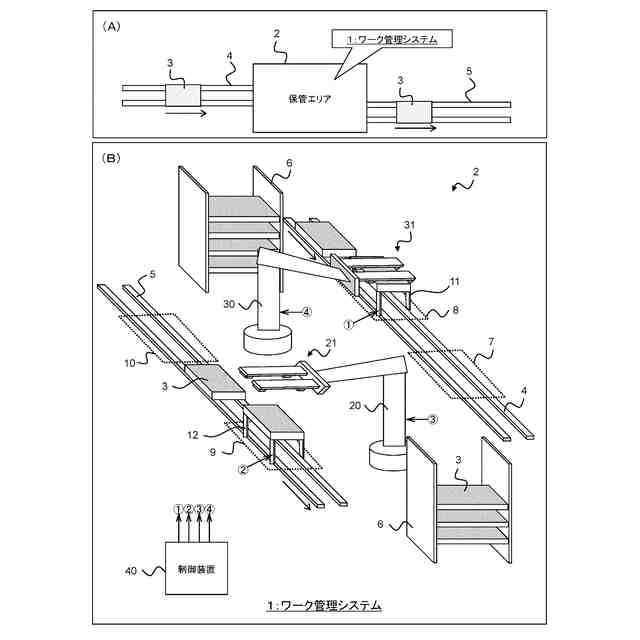
【解決手段】ワーク管理システム1は、第2入庫口8にワーク3が搬送され、且つ、第1入庫口7にワーク3が未搬送の場合、第1リフト機構11を上昇させるように第1リフト機構11に対して指示を出す。また、ワーク管理システム1は、第1リフト機構11によりリフトされたワーク3を第2ロボットハンド31で保持して保管棚6に収納する。
【選択図】図1
特許請求の範囲
【請求項1】
ワークを管理するワーク管理システムであって、
第1入庫口または前記第1入庫口より搬送方向後側の第2入庫口に前記ワークを搬入するための搬入用コンベアと、
第1出庫口または前記第1出庫口より搬送方向後側の第2出庫口に払い出されたワークを搬出するための搬出用コンベアと、
前記搬入用コンベアと前記搬出用コンベアの間か外側に配置された少なくとも1つの保管棚と、
前記第1入庫口と前記保管棚と前記第1出庫口にアクセス可能な第1ロボットハンドを有する第1ロボットと、
前記第2入庫口と前記保管棚と前記第2出庫口にアクセス可能な第2ロボットハンドを有する第2ロボットと、
前記第2入庫口に昇降可能に設けられ、前記搬入用コンベアに載置されたワークをリフト可能な第1リフト機構と、
前記第1出庫口に昇降可能に設けられ、前記搬出用コンベアに載置されたワークをリフト可能な第2リフト機構と、
少なくとも、前記第1リフト機構と前記第2リフト機構とを制御する制御装置と、
を備え、
前記第1ロボットは、前記第1入庫口に搬入されたワークを前記第1ロボットハンドで保持して前記保管棚に収納し、前記保管棚に収納された前記ワークを前記第1ロボットハンドで保持して前記第1出庫口に払い出すように構成され、
前記第2ロボットは、前記第2入庫口に搬入されたワークを前記第2ロボットハンドで保持して前記保管棚に収納し、前記保管棚に収納された前記ワークを前記第2ロボットハンドで保持して前記第2出庫口に払い出すように構成され、
前記制御装置は、前記第2入庫口にワークが搬送され、且つ、前記第1入庫口にワークが未搬送の場合、前記第1リフト機構を上昇させるように前記第1リフト機構に対して指示を出すように構成され、
前記第2ロボットは、更に、前記第1リフト機構によりリフトされたワークを前記第2ロボットハンドで保持して前記保管棚に収納するように構成される
ことを特徴とするワーク管理システム。
続きを表示(約 180 文字)
【請求項2】
請求項1に記載のワーク管理システムであって、
前記制御装置は、更に、
前記第2出庫口に払い出されたワークの搬送順が、前記第1出庫口に払い出されたワークの搬送順よりも先である場合、前記第2リフト機構を上昇させるように前記第2リフト機構に対して指示を出すように構成された
ことを特徴とするワーク管理システム。
発明の詳細な説明
【技術分野】
【0001】
本開示は、ワークを管理するシステムに関する。
続きを表示(約 2,700 文字)
【背景技術】
【0002】
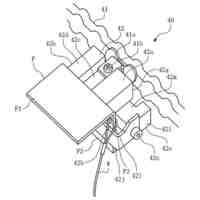
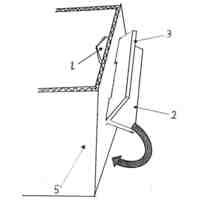
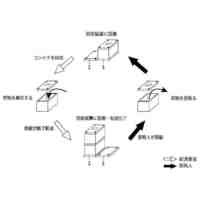
特許文献1は、搬送ライン(コンベア)上で後行のワークが先行のワークを追い越すことが可能な搬送装置を開示している。搬送装置は、先行のワークを持ち上げる追い越し補助手段(垂直移動トラバーサ)を有している。垂直移動トラバーサには左右に一対の昇降台が設けられ、それぞれの昇降台には一対のシリンダが取り付けられ、シリンダの先端にはフォークが取り付けられている。ワークにはフォークを挿入するための凹部が4箇所に形成されている。先行のワークが垂直移動トラバーサの位置に達したときに、一対の昇降台を同時に降下させると共にシリンダを駆動することで、フォークが凹部の内部に入り込む。この状態で、一対の昇降台を同時に上昇させることで、先行のワークが上昇する。これにより、後行のワークは垂直移動トラバーサの位置を通過して先行のワークを追い越すことが可能となる。
【先行技術文献】
【特許文献】
【0003】
特開2003-237940号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
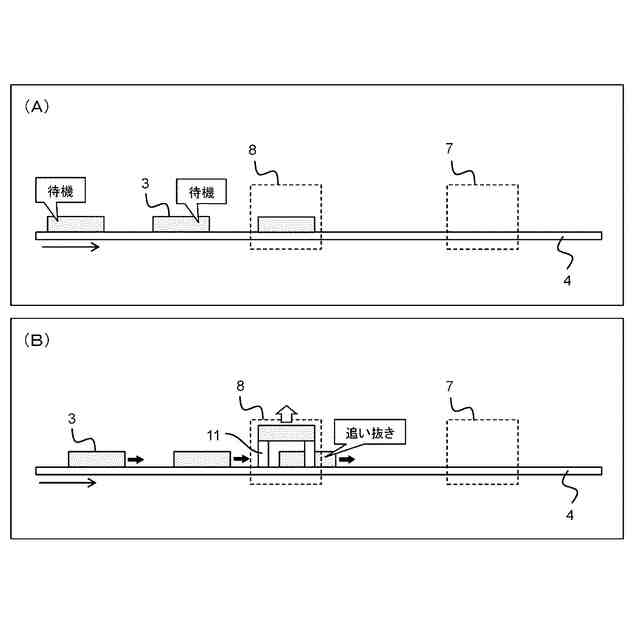
単一のコンベアに載置されたワークを、複数のロボットハンドを用いて、保管棚に収納する場合を考える。あるロボットハンドがアクセス可能な入庫口にワーク(先行のワーク)が搬送され、搬送方向前側(下流側)に設けられた別のロボットハンドがアクセス可能な入庫口にワークが未搬送の場合、先行のワークを保管棚に収納している間、先行のワークよりも搬送方向後側(上流側)のワーク(後行のワーク)を保管棚に収納することができない。この場合、後行のワークを保管棚に収納するまでに生じる待ち時間(待機状態となる時間)が長くなる。保管棚から払い出したワークを組み付けて製品を生産する場合に、製品の生産効率(生産性)を高めるためには、保管棚からワークを効率よく払い出すだけでなく、後行のワークが待機状態となる待ち時間を短縮して保管棚にワークを効率よく収納する必要がある。保管棚に効率よく収納するには、単一のコンベアにおいて、ワークが未搬送である入庫口に後行のワークを搬送させるように、先行のワークをリフト可能なリフト機構を設けることが望ましい。
【0005】
更に、保管棚に効率よく収納するためには、先行のワークをコンベアからリフトさせた後、先行のワークをコンベアに戻すのは好ましくない。特許文献1に示されるように、リフト機構の一部(フォーク)が先行のワークの内部に入り込んだ状態で先行のワークをリフトさせる構成では、リフトした先行のワークを保管棚に収納する前に、先行のワークを下降させてコンベアに戻す(載置する)必要がある。このため、保管棚にワークを効率よく収納することができず、その結果として、ワークを用いて生産される製品の生産効率(生産性)を高めることができない。
【0006】
本開示の1つの目的は、保管棚にワークを効率よく収納することができるワーク管理システムを提供することにある。
【課題を解決するための手段】
【0007】
本開示の第1の観点は、ワークを管理するワーク管理システムに関連する。ワーク管理システムは、第1入庫口または第1入庫口より搬送方向後側の第2入庫口にワークを搬入するための搬入用コンベアと、第1出庫口または第1出庫口より搬送方向後側の第2出庫口に払い出されたワークを搬出するための搬出用コンベアと、搬入用コンベアと搬出用コンベアの間か外側に配置された少なくとも1つの保管棚と、第1入庫口と保管棚と第1出庫口にアクセス可能な第1ロボットハンドを有する第1ロボットと、第2入庫口と保管棚と第2出庫口にアクセス可能な第2ロボットハンドを有する第2ロボットと、第2入庫口に昇降可能に設けられ、搬入用コンベアに載置されたワークをリフト可能な第1リフト機構と、第1出庫口に昇降可能に設けられ、搬出用コンベアに載置されたワークをリフト可能な第2リフト機構と、少なくとも、第1リフト機構と第2リフト機構とを制御する制御装置と、を備えている。第1ロボットは、第1入庫口に搬入されたワークを第1ロボットハンドで保持して保管棚に収納する。また、第1ロボットは、保管棚に収納されたワークを第1ロボットハンドで保持して第1出庫口に払い出す。第2ロボットは、第2入庫口に搬入されたワークを第2ロボットハンドで保持して保管棚に収納する。また、第2ロボットは、保管棚に収納されたワークを第2ロボットハンドで保持して第2出庫口に払い出す。制御装置は、第2入庫口にワークが搬送され、且つ、第1入庫口にワークが未搬送の場合、第1リフト機構を上昇させるように第1リフト機構に対して指示を出す。更に、第2ロボットは、第1リフト機構によりリフトされたワークを第2ロボットハンドで保持して保管棚に収納する。
【0008】
本開示の第2の観点は、第1の観点に加えて、次の特徴を更に有する。制御装置は、第2出庫口に払い出されたワークの搬送順が、第1出庫口に払い出されたワークの搬送順よりも先である場合、第2リフト機構を上昇させるように第2リフト機構に対して指示を出す。
【発明の効果】
【0009】
本開示の第1の観点によれば、第2入庫口にワーク(先行のワーク)が搬送され、且つ、第1入庫口にワークが未搬送の場合、先行のワークが第1リフト機構によりリフトされる。これにより、後から第2入庫口に搬入されるワーク(後行のワーク)が第2入庫口を通過して第1入庫口に搬入され、後行のワークが第1ロボットハンドにより保持されて保管棚に収納される。その結果、後行のワークが待機状態となる時間を短縮することができる。しかも、第1リフト機構によりリフトされたワークは、搬入用コンベアに戻されることなく第2ロボットハンドにより保持されて保管棚に収納される。これにより、ワークの保管棚への収納に要する時間を短くすることができ、後行のワークが待機状態となる時間を短縮できることと相俟って、保管棚にワークを効率よく収納することができる。
【0010】
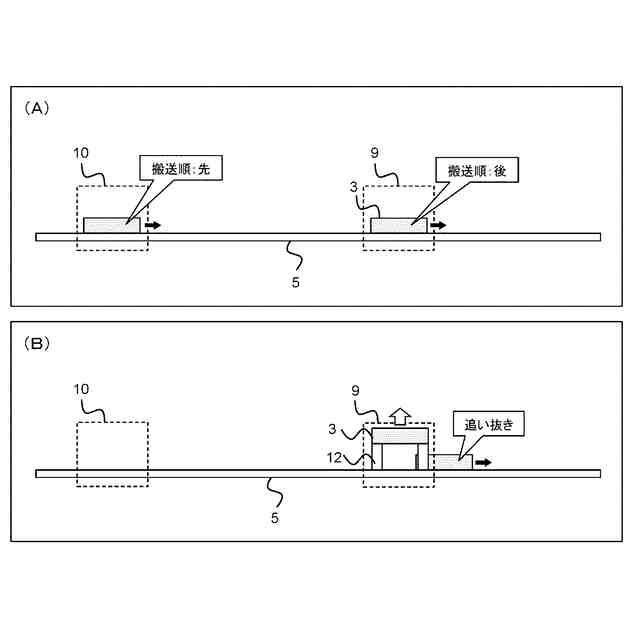
本開示の第2の観点によれば、第2出庫口に払い出されたワーク(先行のワーク)の搬送順が、第1出庫口に払い出されたワーク(後行のワーク)の搬送順よりも先である場合、後行のワークが第2リフト機構によりリフトされる。これにより、先行のワークが後行のワークを追い抜くことができ、ワークの搬送順が適正化される。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
三機工業株式会社
部品保持具
1か月前
三機工業株式会社
部品の送り機構
1か月前
三機工業株式会社
長尺物の支持機構
1か月前
三機工業株式会社
ワーク管理システム
1か月前
国立大学法人群馬大学
磁気浮上装置の制御システム
7日前
個人
箱
9か月前
個人
収容箱
今日
個人
ゴミ箱
9か月前
個人
コンベア
1か月前
個人
段ボール箱
3か月前
個人
段ボール箱
3か月前
個人
ゴミ収集器
3か月前
個人
容器
6か月前
個人
楽ちんハンド
1か月前
個人
土嚢運搬器具
5か月前
個人
パウチ補助具
8か月前
個人
角筒状構造体
2か月前
個人
宅配システム
3か月前
個人
コード類収納具
4か月前
個人
閉塞装置
6か月前
個人
お薬の締結装置
2か月前
個人
ゴミ処理機
5か月前
個人
貯蔵サイロ
3か月前
個人
蓋閉止構造
15日前
個人
蓋閉止構造
15日前
株式会社コロナ
梱包材
2か月前
株式会社和気
包装用箱
5か月前
個人
把手付米袋
1か月前
三甲株式会社
蓋体
4か月前
個人
輸送積荷用動吸振器
2か月前
個人
搬送システム
3か月前
株式会社新弘
容器
9か月前
株式会社新弘
容器
9か月前
個人
包装箱
6か月前
三甲株式会社
蓋体
6か月前
個人
袋入り即席麺
3か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ