TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025103557
公報種別
公開特許公報(A)
公開日
2025-07-09
出願番号
2023221022
出願日
2023-12-27
発明の名称
磁気浮上装置の制御システム
出願人
国立大学法人群馬大学
,
三機工業株式会社
代理人
弁理士法人山田特許事務所
主分類
H02N
15/00 20060101AFI20250702BHJP(電力の発電,変換,配電)
要約
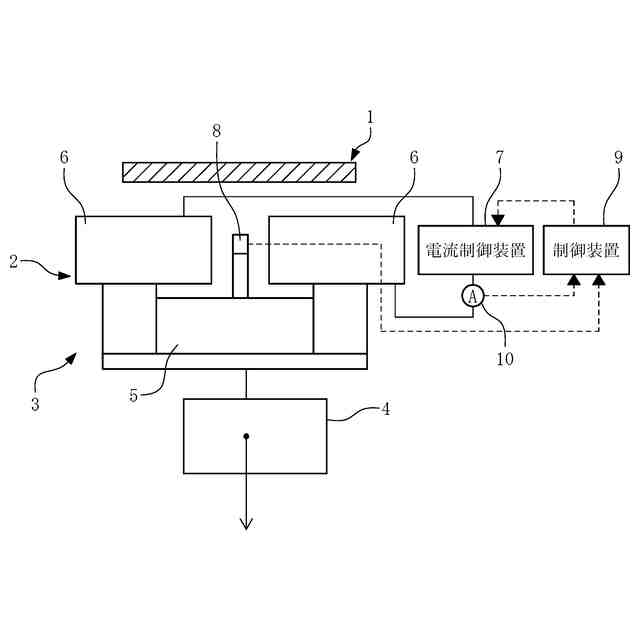
【課題】ゼロパワー制御を簡便且つ好適に実現し得る磁気浮上装置の制御システムを提供する。
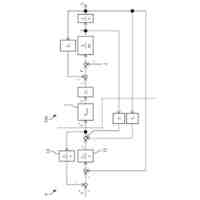
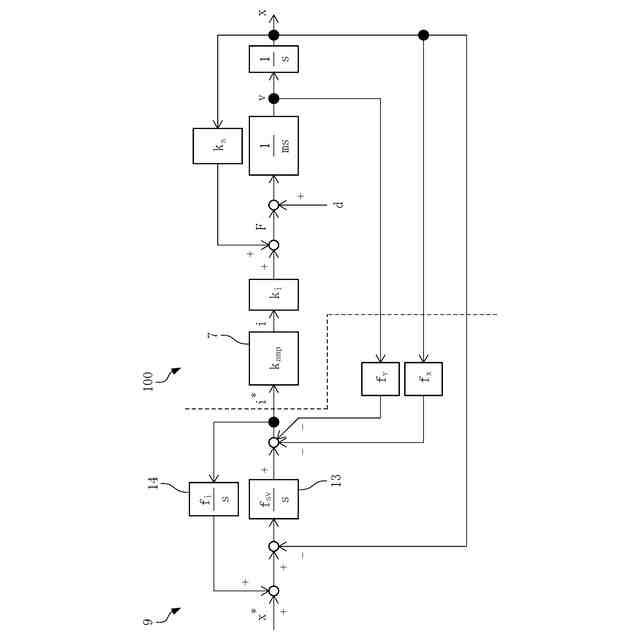
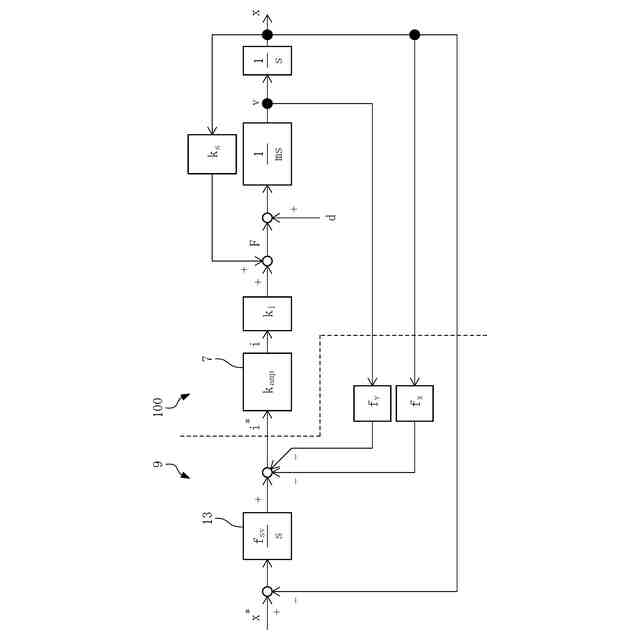
【解決手段】電磁石と永久磁石とを備えた磁石ユニットと、電磁石に励磁電流を入力する電流制御装置7と、該電流制御装置7に電流値iの指令値i
*
を入力する制御装置9とを備え、浮上体を磁石ユニットの磁力によって支持すると共に、浮上体の位置を制御する磁気浮上装置の制御システムに関し、浮上体の位置指令x
*
を入力値として電流値iの指令値i
*
を出力する位置サーボ13を備え、浮上体の検出位置xを位置サーボ13にフィードバックすると共に、浮上体の状態量を位置サーボ13の下流にフィードバックする状態フィードバック制御を行い、且つ、電流制御装置7に入力される電流値iの指令値i
*
を電流帰還信号14として位置サーボ13へさらにフィードバックする。
【選択図】図10
特許請求の範囲
【請求項1】
電磁石と永久磁石とを備えた磁石ユニットと、前記電磁石に励磁電流を入力する電流制御装置と、該電流制御装置に電流値の指令値を入力する制御装置とを備え、浮上体を前記磁石ユニットの磁力によって支持すると共に、前記浮上体の位置を制御する磁気浮上装置の制御システムであって、
前記浮上体の位置指令を入力値として電流値の指令値を出力する位置サーボを備え、
前記浮上体の検出位置を前記位置サーボにフィードバックすると共に、
前記浮上体の状態量を前記位置サーボの下流にフィードバックする状態フィードバック制御を行うよう構成され、且つ、
前記電流制御装置から出力される電流値または前記電流制御装置に入力される電流値の指令値のうち少なくとも一方を電流帰還信号として前記位置サーボへさらにフィードバックし得るよう構成されていること
を特徴とする磁気浮上装置の制御システム。
続きを表示(約 180 文字)
【請求項2】
前記電流制御装置に入力される電流値の指令値を前記電流帰還信号として前記位置サーボへフィードバックし得るよう構成されていること
を特徴とする請求項1に記載の磁気浮上装置の制御システム。
【請求項3】
前記電流帰還信号のオンオフを切替え可能に構成されていること
を特徴とする請求項1に記載の磁気浮上装置の制御システム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、電磁気力を利用して対象物を浮上させる装置において、該対象物の位置を制御するためのシステムに関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
磁気浮上装置は、磁力により非接触で物体を支持する技術である。磁気浮上装置には、対象物(以下、本明細書では「浮上体」と称する)の支持にあたり、支持する側の機構と、支持される浮上体側との間に機械的接触を要しないという特性と、それに起因する多くの利点(摩擦による摩耗や摩擦熱、騒音が生じないこと、潤滑剤が不要であること等)があり、例えばベルトコンベアやフライホイール、リニアモーターカーといった種々の装置への利用が提案・実用化されている。
【0003】
こうした磁気浮上装置は、永久磁石と電磁石を組み合わせて構成されており、永久磁石と電磁石の磁力により浮上体を支持するようになっている。前記磁力の合計値が浮上体の重量と釣り合えば、浮上体を支持することができる。
【0004】
ここで、前記磁力の合計値は、電磁石に流れる励磁電流のほか、電磁石および永久磁石と対象物との距離にも依存するので、浮上体の位置を、ちょうど浮上体にかかる重力と永久磁石による磁力がバランスする位置に調整すれば、電磁石に流す電流をゼロアンペアとしながら浮上体を支持することが可能である。これをゼロパワー制御という。
【0005】
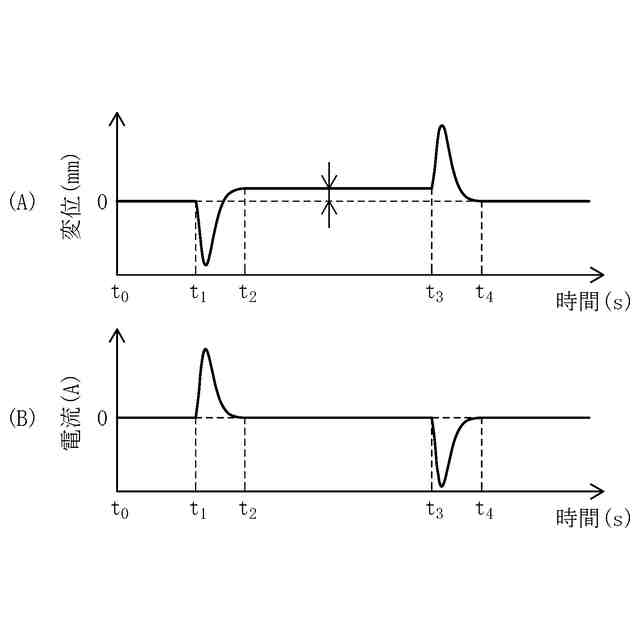
ゼロパワー制御が可能となる浮上体の位置は浮上体の重量によって変動し、浮上体の重量は、積載される積荷や搭載される部品等に応じて変動し得る。また、浮上体を支持する間、振動などの外力によって浮上体の位置が変動することもある。そこで、磁気浮上装置においてゼロパワー制御を行う場合、ゼロパワー制御が可能な位置(以下、本明細書では「ゼロパワー制御が可能な浮上体の位置」を「ゼロ制御位置」と便宜的に称することとする)と、浮上体の実際の位置にずれが生じた場合に、電磁石に電流を流して永久磁石との合計磁力を調整し、これによって浮上体の位置を動かしてゼロ制御位置に近づける制御を行う。この間、電磁石には一時的に電流を流す必要があるが、浮上体の位置がゼロ制御位置で安定すれば、電流値はゼロに収束し、再びゼロパワー制御が可能となる。
【0006】
この種の磁気浮上装置やその制御に関連する先行技術文献としては、例えば、下記の特許文献1、非特許文献1、2等がある。
【先行技術文献】
【特許文献】
【0007】
特開2002-81498号公報
【非特許文献】
【0008】
石野 裕二、水野 毅「磁気浮上系の局所電流フィードバックによる負のバネ剛性制御」第49回自動制御連合講演会講演論文集(2006年)p61-64
上條 芳武、伊東 弘晃、丸山 裕「ゼロパワー制御を用いた磁気軸受の構成と軸支持特性」日本機械学会論文集C編79巻808号(2013年)p4963-4972
【発明の概要】
【発明が解決しようとする課題】
【0009】
磁気浮上装置におけるゼロパワー制御に関し、従来は、例えば上記非特許文献1に記載されているように、浮上体の位置をギャップセンサによって監視し、前記ギャップセンサの信号に対しPD制御を行うと共に、制御入力にあたる電流信号にゲインを乗じたうえ、積分をかけて正帰還するという手法がしばしば用いられてきた。しかしながら、このような手法では電流の制御に対する調整パラメータが限られるため調整は容易である一方、浮上体の位置の制御やゼロ電流制御における性能には限界があり、特に過渡特性に弱点を抱えていた。
【0010】
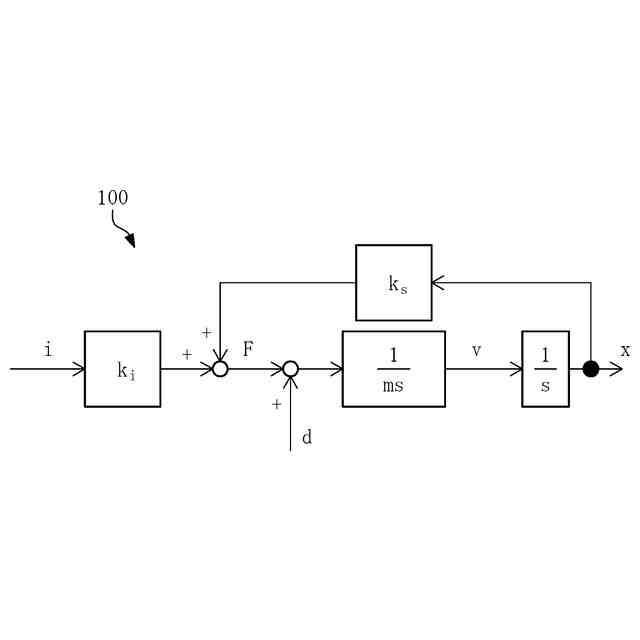
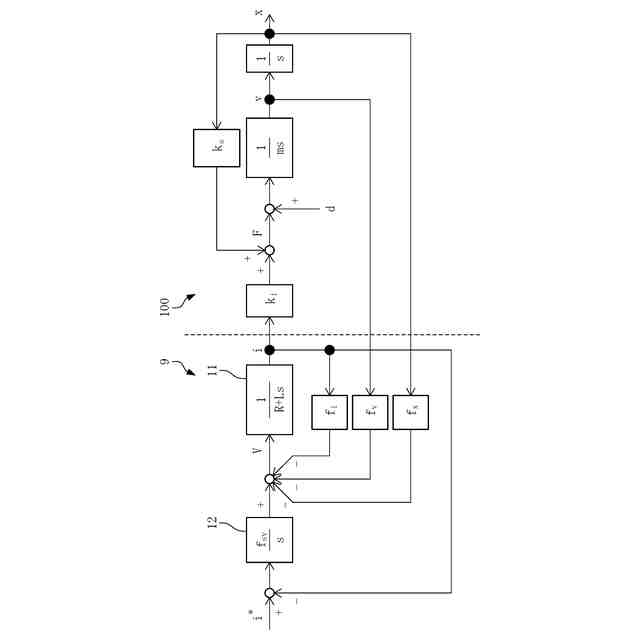
このような弱点を改善し得る手法としては、例えば上記非特許文献2に記載されているような電流サーボ型の状態フィードバック制御を用いる方法がある。制御対象の全状態量をフィードバックし、そのメジャーループを電流信号による積分器付きのサーボ系とするのである。このような制御法によれば、動特性の改善を図りつつ、電流値を任意に制御することが可能であり、電流指令値をゼロに設定すればゼロパワー制御が実現でき、ゼロ電流に至るまでの過渡特性も改善される。ただし、この手法にも問題点が全くないわけではなく、例えば、電流入力型ではなく電圧入力型の制御であるため、そのままでは状態フィードバック制御ができないといった欠点がある。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
国立大学法人群馬大学
構造体を作製する方法
1か月前
国立大学法人群馬大学
支持構造の異常検知方法
2か月前
国立大学法人群馬大学
支持構造の異常検知方法
2か月前
国立大学法人群馬大学
塩応答性材料およびその使用
4か月前
国立大学法人群馬大学
磁気浮上装置の制御システム
4か月前
国立大学法人群馬大学
運動機能検査における評価システム
2か月前
国立大学法人群馬大学
生分解性樹脂の海洋生分解速度制御方法
4か月前
日清紡ホールディングス株式会社
触媒
3か月前
国立大学法人群馬大学
海洋生分解性樹脂組成物および分解速度促進剤
1日前
国立大学法人群馬大学
発泡金属体形成用ワイヤ及び発泡金属体の形成方法
1か月前
国立大学法人群馬大学
NADPHを補酵素とする酵素の高感度活性測定法
2か月前
群馬県
三面型振動試験用治具
3か月前
株式会社SUBARU
評価方法、情報処理装置及び評価システム
4か月前
福助工業株式会社
複合粉末の製造方法及び生分解性樹脂組成物の製造方法
4か月前
国立大学法人群馬大学
超高分子量ポリエチレン製フィルム及びポリオレフィン製フィルムの製造方法
2日前
国立大学法人群馬大学
生体組織硬さ測定用の加振器付きアタッチメント及びこれを備えた生体組織の硬さ測定装置
2か月前
株式会社Laboko
微細構造体デバイス製造システム及び微細構造体デバイス製造方法
6か月前
タキロンシーアイ株式会社
多孔フィルムの製造方法
28日前
国立大学法人群馬大学
せん断波伝播速度推定による靭帯ないし腱の状態表示方法、及びこれを備えた靭帯ないし腱の状態表示システム
2か月前
個人
高圧電気機器の開閉器
16日前
個人
電気を重力で発電装置
29日前
キヤノン電子株式会社
モータ
28日前
キヤノン電子株式会社
モータ
1か月前
コーセル株式会社
電源装置
1か月前
日星電気株式会社
ケーブル組立体
1か月前
トヨタ自動車株式会社
モータ
28日前
株式会社アイドゥス企画
減反モータ
16日前
株式会社デンソー
回転機
1か月前
株式会社デンソー
端子台
9日前
個人
二次電池繰返パルス放電器用印刷基板
1か月前
株式会社デンソー
電力変換装置
1か月前
株式会社デンソー
電力変換装置
1か月前
本田技研工業株式会社
回転電機
2日前
ローム株式会社
半導体集積回路
7日前
株式会社ミツバ
回転電機
1か月前
株式会社TMEIC
制御装置
8日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ