TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025076895
公報種別
公開特許公報(A)
公開日
2025-05-16
出願番号
2023188839
出願日
2023-11-02
発明の名称
水中清掃装置
出願人
株式会社FullDepth
代理人
弁理士法人瑛彩知的財産事務所
主分類
B63B
59/10 20060101AFI20250509BHJP(船舶またはその他の水上浮揚構造物;関連艤装品)
要約
【課題】 効率的な清掃が可能な水中清掃装置を提供する。
【解決手段】 水中清掃装置であって、水中を移動するための移動手段と、水中の清掃対象を清掃するための清掃手段と、清掃対象の画像または清掃対象の表面の摩擦係数を取得するための1以上の取得手段と、画像または摩擦係数に基づいて移動手段を制御するための移動制御手段と、を備える水中清掃装置。
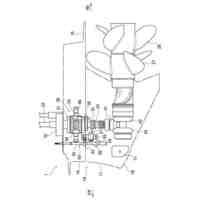
【選択図】 図1
特許請求の範囲
【請求項1】
水中清掃装置であって、
水中を移動するための移動手段と、
水中の清掃対象を清掃するための清掃手段と、
前記清掃対象の画像または前記清掃対象の表面の摩擦係数を取得するための1以上の取得手段と、
前記画像または前記摩擦係数に基づいて前記移動手段を制御するための移動制御手段と、
を備える水中清掃装置。
続きを表示(約 1,300 文字)
【請求項2】
前記画像または前記摩擦係数に基づいて前記清掃手段を制御するための清掃制御手段をさらに備える、
ことを特徴とする、請求項1に記載の水中清掃装置。
【請求項3】
前記1以上の取得手段は、前記清掃対象の画像を取得するための手段であり、
前記1以上の取得手段と前記清掃手段は、前記水中清掃装置の進行方向に沿って並べて配置され、
前記進行方向と略直角な方向に延びる前記1以上の取得手段の画像取得範囲と、前記略直角な方向に延びる前記清掃手段の清掃範囲は対応している、
ことを特徴とする、請求項1に記載の水中清掃装置。
【請求項4】
前記1以上の取得手段は、前記清掃対象の画像を取得するための手段であり、第1の取得手段と第2の取得手段を含み、
前記第1の取得手段と前記第2の取得手段は、前記水中清掃装置の進行方向に沿って前記清掃手段を挟むように配置されている、
ことを特徴とする、請求項1に記載の水中清掃装置。
【請求項5】
前記第1の取得手段は、前記第2の取得手段よりも、前記進行方向の前側に配置され、
前記移動制御手段は、前記第2の取得手段により取得された画像に基づいて前記移動手段を制御し、
前記第1の取得手段により取得された画像に基づいて前記清掃手段をさらに制御するための清掃制御手段をさらに備える、
ことを特徴とする、請求項4に記載の水中清掃装置。
【請求項6】
前記移動制御手段は、前記第1の取得手段により取得された画像に基づいて前記移動手段をさらに制御し、前記水中清掃装置の移動速度を変更する、
ことを特徴とする、請求項5に記載の水中清掃装置。
【請求項7】
前記水中清掃装置が往復運動を行う場合、前記移動制御手段は、往路では、前記第2の取得手段により取得された画像に基づいて前記移動手段を制御し、復路では、前記第1の取得手段により取得された画像に基づいて前記移動手段を制御し、前記清掃制御手段は、往路では、前記第1の取得手段により取得された画像に基づいて前記清掃手段を制御し、復路では、前記第2の取得手段により取得された画像に基づいて前記清掃手段を制御する、
ことを特徴とする、請求項5に記載の水中清掃装置。
【請求項8】
前記移動手段は、前記清掃対象の表面上を直線的に移動させ、往復運動させる、
ことを特徴とする、請求項1に記載の水中清掃装置。
【請求項9】
前記画像に基づいて清掃の完了、未完了を判断する画像解析手段をさらに備え、
前記移動制御手段は、完了の場合は前記移動手段を制御して前記水中清掃装置を前進させ、未完了の場合には前記移動手段を制御して前記水中清掃装置を後退させる、
ことを特徴とする、請求項1に記載の水中清掃装置。
【請求項10】
前記移動制御手段は、完了の場合に加えて、清掃回数または清掃時間が所定値を超えた場合に、前記移動手段を制御して前記水中清掃装置を前進させる、
ことを特徴とする、請求項9に記載の水中清掃装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、水中清掃装置に関する。
続きを表示(約 3,600 文字)
【背景技術】
【0002】
背景技術を開示する文献として、特表2021-521057号公報(特許文献1)がある。この文献には、「図1Cにおいて、船舶140の船体をクリーニングするための方法が提供されている。142において、水中船体クリーニング・マシン(たとえば、100)が、船体の表面に展開され得る。144において、表面の一部のリアルタイム画像が、表面の一部がクリーニングされるべきであるかどうかを決定するために(たとえば、カメラまたはCCTVによって)キャプチャーされ得る。146において、表面の一部がクリーニングされるべきであるということが決定される場合には、水中船体クリーニング・マシン100の少なくとも1つのブラシ(たとえば、108)が、伸長位置に低下させられ得る。伸長位置において、少なくとも1つのブラシ108は、水中船体クリーニング・マシン100のベース領域(たとえば、104)に向けて下向きに延在することが可能であり、表面の一部と接触していることが可能である。」と記載されている(段落0060参照)。
【0003】
別の文献として、特開2015-157587号公報(特許文献2)がある。この文献には、「収容体3の前端部(走行方向前端部)及び後端部(走行方向後端部)にはそれぞれ、透明の前側カバー31及び後側カバー33が設けられ、前側カバー31内には前方カメラ35が収容され、後側カバー33内には後方カメラ37が収容されていて、前方カメラ35及び後方カメラ37から送られて制御・モニタ用パソコン29に映し出される前方映像や後方映像を確認しながらコントローラ27で水中清掃機1の水中での、そして船底及び船側上での移動又は走行を制御する。」と記載されている(段落0017参照)。
【0004】
さらに別の文献として、特開2011-088485号公報(特許文献3)がある。この文献には、「このような対構成のスラスタ兼ブラシが同時にではなく、一方が船底或いは船側面に接地した場合は、反モーメントによりピッチ運動が発生することになるが、ピッチ運動(z軸周りの運動)は、上述のように、複数個のサイドスラスタ、後部の複数個のスラスタのそれぞれの差動、或いは組み合わせで制御する。このような制御は、装置の前後にカメラを搭載して、遠隔制御により行う。」と記載されている(段落0017参照)。
【先行技術文献】
【特許文献】
【0005】
特表2021-521057号公報
特開2015-157587号公報
特開2011-088485号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
上記の特許文献1には、画像に基づいてブラシを船体表面に向けて降下させることが記載されている。上記の特許文献2には、カメラの映像に基づいて人が水中清掃機の移動を制御することが記載されている。上記の特許文献3には、カメラの映像に基づいて人が装置(水中ロボット)を制御することが記載されている。しかし、いずれの特許文献も、画像に基づいて水中清掃装置の移動を自動制御することについて開示していない。また、いずれの特許文献も、清掃対象表面の摩擦係数に基づいて水中清掃装置の移動を自動制御することについて開示していない。
本発明はこのような事情に鑑みてなされたものであり、効率的な清掃が可能な水中清掃装置を提供する。
【課題を解決するための手段】
【0007】
上記課題を解決するために、例えば、特許請求の範囲に記載の構成を採用する。
本願は上記課題を解決するための手段を複数含んでいるが、その一例を挙げるならば、水中清掃装置であって、水中を移動するための移動手段と、水中の清掃対象を清掃するための清掃手段と、前記清掃対象の画像または前記清掃対象の表面の摩擦係数を取得するための1以上の取得手段と、前記画像または前記摩擦係数に基づいて前記移動手段を制御するための移動制御手段と、備える水中清掃装置が挙げられる。
【発明の効果】
【0008】
本発明によれば、効率的な清掃が可能な水中清掃装置を提供することができる。
上記したもの以外の課題、構成及び効果は、以下の実施形態の説明により明らかにされる。
【図面の簡単な説明】
【0009】
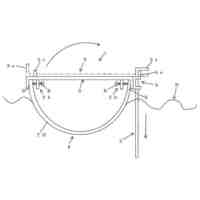
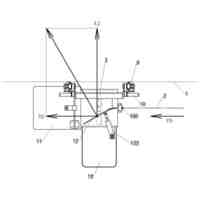
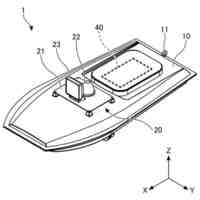
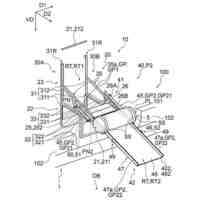
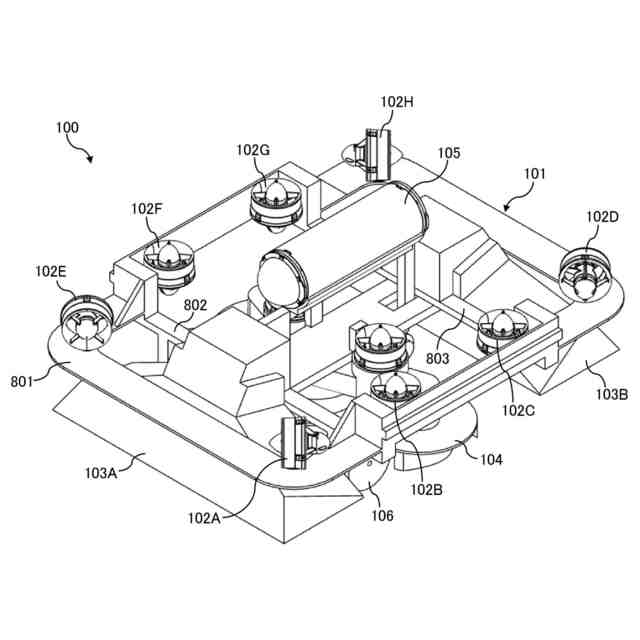
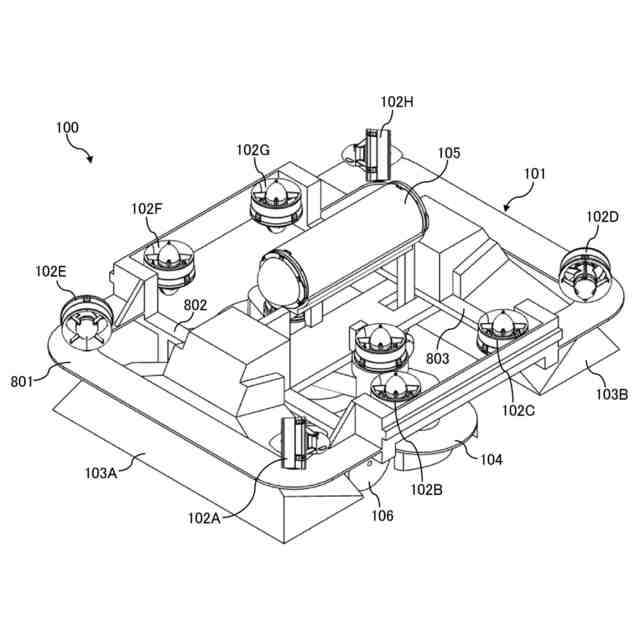
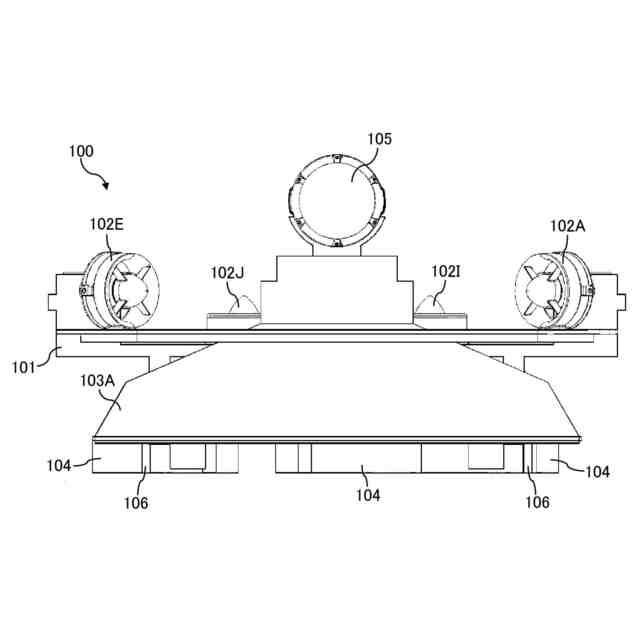
図1は、ROV100の外観の例を示す、上から見た斜視図である。
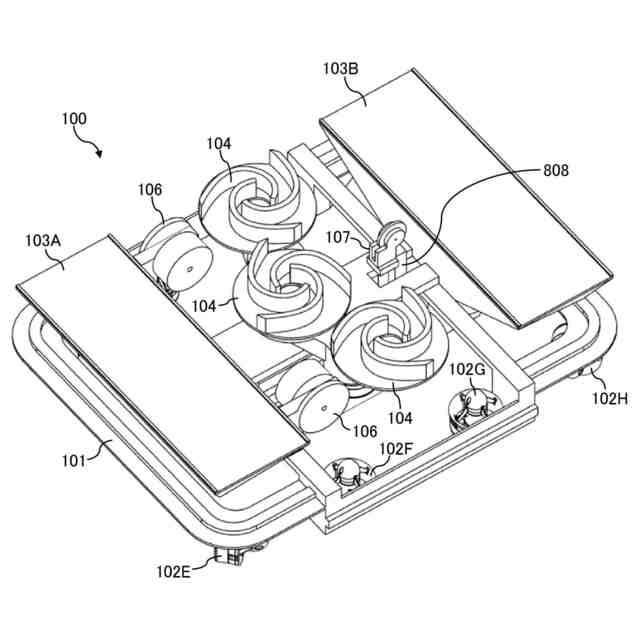
図2は、ROV100の外観の例を示す、下から見た斜視図である。
図3は、ROV100の外観の例を示す平面図である。
図4は、ROV100の外観の例を示す正面図である。
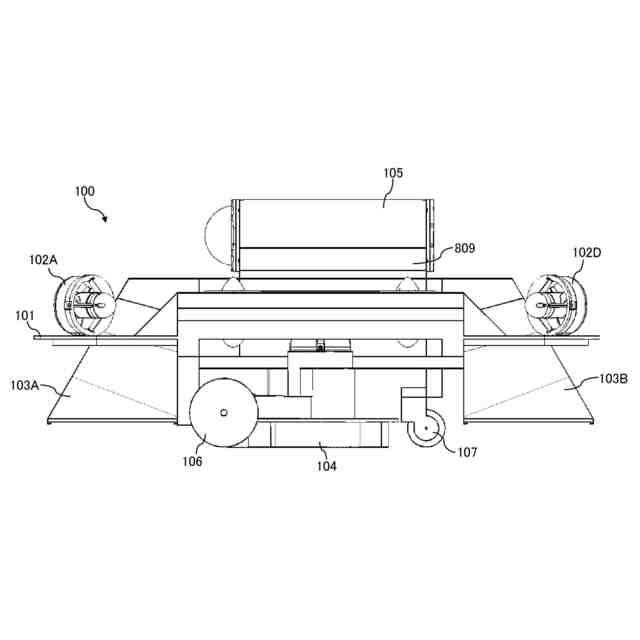
図5は、ROV100の外観の例を示す側面図である。
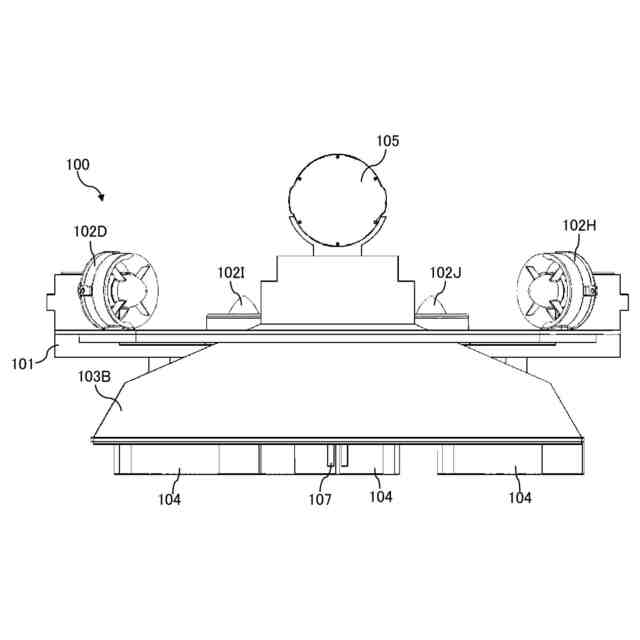
図6は、ROV100の外観の例を示す背面図である。
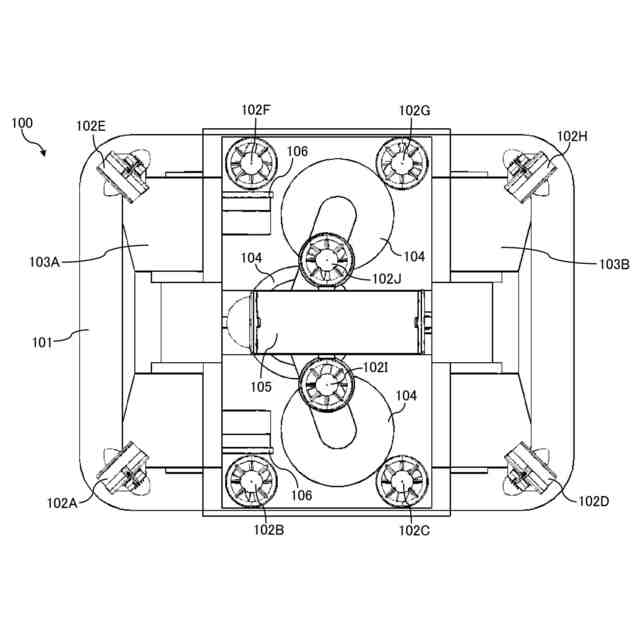
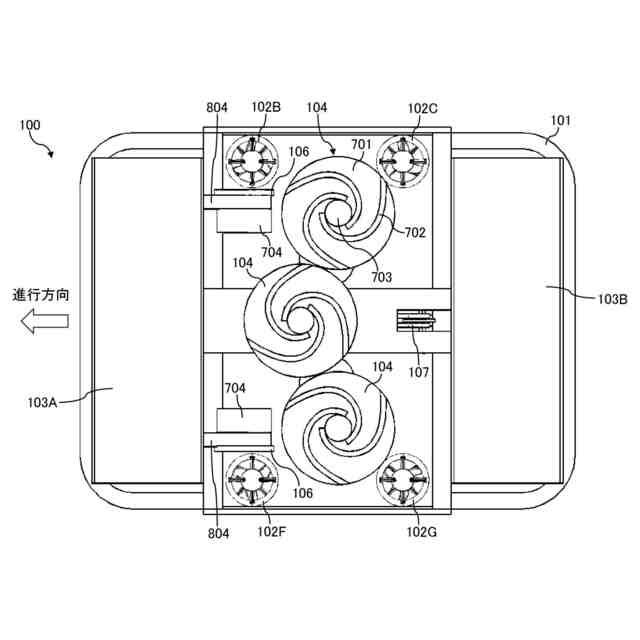
図7は、ROV100の外観の例を示す底面図である。
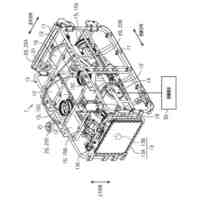
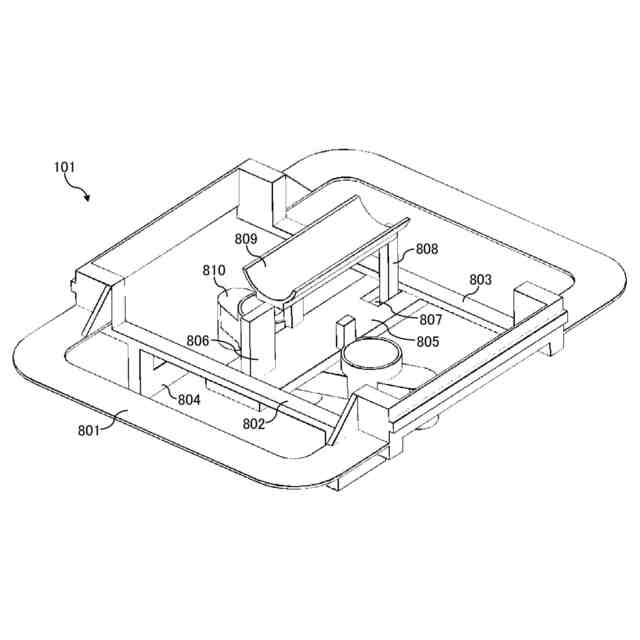
図8は、フレーム101の外観の例を示す、上から見た斜視図である。
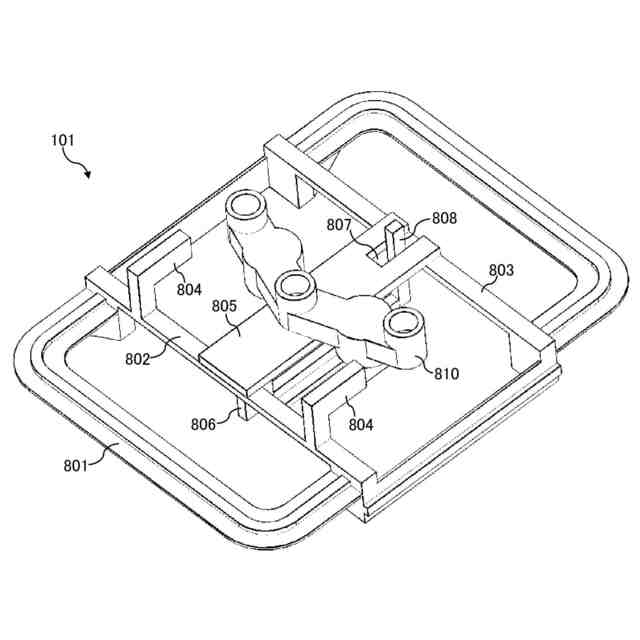
図9は、フレーム101の外観の例を示す、下から見た斜視図である。
図10は、フレーム101の外観の例を示す平面図である。
図11は、フレーム101の外観の例を示す側面図である。
図12は、フレーム101の外観の例を示す底面図である。
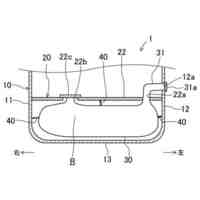
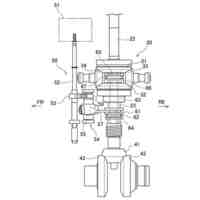
図13は、カメラユニット103の横断面の例を示す図である。
図14は、カメラユニット103の縦断面の例を示す図である。
図15は、ROV100の電気的構成の一例を示す。
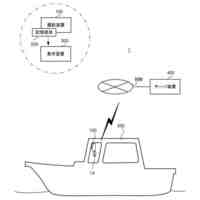
図16は、ROV100の運用方法の例を示す。
図17は、ROV100の運用方法の例を示す。
図18は、ROV100の運用方法の例を示す。
図19は、ROV100の運用方法の例を示す。
図20は、ROV100の運用方法の例を示す。
図21は、ROV100の運用方法の例を示す。
図22は、ROV100の運用方法の例を示す。
図23は、ROV100の運用方法の例を示す。
図24は、清掃時の制御フローの一例を示す。
図25は、欠陥検出処理フローの一例を示す。
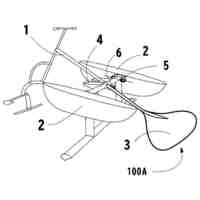
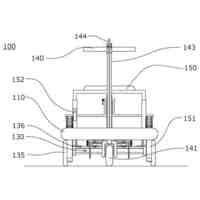
図26は、ROV100Aの外観の例を示す、上から見た斜視図である。
図27は、ROV100Aの外観の例を示す、下から見た斜視図である。
図28は、ROV100Aの外観の例を示す平面図である。
図29は、ROV100Aの外観の例を示す正面図である。
図30は、ROV100Aの外観の例を示す側面図である。
図31は、ROV100Aの外観の例を示す背面図である。
図32は、ROV100Aの外観の例を示す底面図である。
図33は、フレーム101Aの外観の例を示す、上から見た斜視図である。
図34は、フレーム101Aの外観の例を示す、下から見た斜視図である。
図35は、フレーム101Aの外観の例を示す平面図である。
図36は、フレーム101Aの外観の例を示す側面図である。
図37は、フレーム101Aの外観の例を示す底面図である。
図38は、カメラユニット2601の横断面の例を示す。
図39は、カメラユニット2601の縦断面の例を示す。
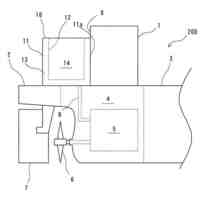
図40は、カメラユニット2601とカメラユニット103の厚さを比較する図である
図41は、ROV100AとROV100の厚さを比較する図である。
図42は、ROV100Aの電気的構成の一例を示す。
図43は、ROV100Bの外観の例を示す、上から見た斜視図である。
図44は、ROV100Bの外観の例を示す、下から見た斜視図である。
図45は、ROV100Bの外観の例を示す平面図である。
図46は、ROV100Bの電気的構成の一例を示す。
図47は、清掃時の制御フローの一例を示す。
【発明を実施するための形態】
【0010】
以下、図面を参照して実施例について説明する。
1.第1実施例
1-1.概要
従来、船底の点検と洗浄は2~5年ごとの入渠時や、ダイバーの目視点検でマリングロス(言い換えると、海中生物付着)の洗浄が必要と判断された際に、主に人手により行われている。マリングロスの繁殖により、船舶の燃費が5~15%低下する。加えて、船底に付着した他の地域の生物を港に持ち込んでしまうことがある。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
水上遊具
今日
個人
川下り用船
6か月前
個人
発電船
7か月前
個人
シーアンカー
8か月前
個人
船用横揺防止具
3か月前
個人
補助機構
2か月前
個人
コンパクトシティ船
2か月前
小柳建設株式会社
台船
9か月前
個人
渦流動力推進構造
2か月前
ウラカミ合同会社
曳航ロボット
10か月前
炎重工株式会社
浮標
4か月前
炎重工株式会社
浮標
4か月前
個人
水陸両用移動装置
9か月前
炎重工株式会社
移動体
7か月前
個人
船舶
4か月前
個人
スクリュープロペラ
2か月前
株式会社フルトン
水中捕捉装置
2か月前
個人
回転式による流体流出防止タンカー
2か月前
ダイハツ工業株式会社
ジャケット
11か月前
オーケー工業株式会社
係留フック
3か月前
株式会社テラサン
位置保持システム
8か月前
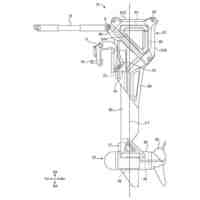
ヤマハ発動機株式会社
船外機
4か月前
スズキ株式会社
船外機
29日前
スズキ株式会社
船外機
2か月前
スズキ株式会社
船外機
2か月前
誠加興業股分有限公司
呼吸用マスク
10か月前
スズキ株式会社
船外機
29日前
常石造船株式会社
メタノール燃料船
5か月前
炎重工株式会社
自律航行浮遊体
4か月前
株式会社ユピテル
システム及びプログラム等
1か月前
川崎汽船株式会社
ドライアイス輸送船
11か月前
株式会社神戸タフ興産
船舶の甲板構造
6か月前
藤倉コンポジット株式会社
架台
5か月前
株式会社大林組
水中潜行システム
4か月前
個人
発光手段を備えたライフジャケット
1か月前
スズキ株式会社
電動船外機
2か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ