TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025075663
公報種別
公開特許公報(A)
公開日
2025-05-15
出願番号
2023186981
出願日
2023-10-31
発明の名称
作業現場の管理システム及び作業現場の管理方法
出願人
株式会社小松製作所
代理人
弁理士法人酒井国際特許事務所
主分類
G05D
1/43 20240101AFI20250508BHJP(制御;調整)
要約
【課題】作業現場の生産性の低下を抑制すること。
【解決手段】作業現場の管理システムは、作業現場で稼働する運搬車両の第1走行コースを生成し、第1走行コースの隣に第2走行コースを生成する走行データ生成部と、所定範囲における第1走行コースと第2走行コースとの相対距離を変更する走行コースデータ調整部と、を備える。
【選択図】図14
特許請求の範囲
【請求項1】
作業現場で稼働する運搬車両の第1走行コースを生成し、前記第1走行コースの隣に第2走行コースを生成する走行データ生成部と、
所定範囲における前記第1走行コースと前記第2走行コースとの相対距離を変更する走行コースデータ調整部と、を備える、
作業現場の管理システム。
続きを表示(約 1,000 文字)
【請求項2】
前記走行コースデータ調整部は、入力装置からの入力データに基づいて、前記相対距離を変更する、
請求項1に記載の作業現場の管理システム。
【請求項3】
前記走行コースデータ調整部は、前記相対距離を長くする、
請求項1に記載の作業現場の管理システム。
【請求項4】
前記運搬車両は、作業場及び前記作業場に通じる搬送路の少なくとも一部を走行し、
前記第1走行コース及び前記第2走行コースのそれぞれは、前記搬送路に生成され、
前記所定範囲は、前記第1走行コース及び前記第2走行コースのそれぞれがカーブする範囲である、
請求項1に記載の作業現場の管理システム。
【請求項5】
前記運搬車両は、作業場及び前記作業場に通じる搬送路の少なくとも一部を走行し、
前記第1走行コース及び前記第2走行コースのそれぞれは、前記搬送路に生成され、
前記所定範囲は、前記作業場と前記搬送路との境界を基準とする範囲である、
請求項1に記載の作業現場の管理システム。
【請求項6】
前記所定範囲は、前記境界を含む、
請求項5に記載の作業現場の管理システム。
【請求項7】
前記走行コースデータ調整部は、前記運搬車両の寸法に基づいて、前記相対距離を長くする、
請求項5に記載の作業現場の管理システム。
【請求項8】
前記走行コースデータ調整部は、前記搬送路から前記作業場に進入する運搬車両と、前記作業場から前記搬送路に退去する運搬車両とが干渉しないように、前記相対距離を長くする、
請求項7に記載の作業現場の管理システム。
【請求項9】
前記運搬車両の走行を許可する許可エリアを生成する許可エリア生成部を備え、
前記走行コースデータ調整部は、前記搬送路から前記作業場に進入する運搬車両の許可エリアと、前記作業場から前記搬送路に退去する運搬車両の許可エリアとが干渉しないように、前記相対距離を長くする、
請求項7に記載の作業現場の管理システム。
【請求項10】
作業現場で稼働する運搬車両の第1走行コースを生成し、前記第1走行コースの隣に第2走行コースを生成することと、
所定範囲における前記第1走行コースと前記第2走行コースとの相対距離を変更することと、を含む、
作業現場の管理方法。
発明の詳細な説明
【技術分野】
【0001】
本開示は、作業現場の管理システム及び作業現場の管理方法に関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
鉱山のような広域の作業現場において、運搬車両が稼働する。特許文献1には、運搬車両の走行コースを生成する技術が開示されている。特許文献1に記載された技術においては、運搬車両が相互にすれ違うことができるように、基準線の一方側に第1走行コースが生成され、基準線の他方側に第2走行コースが生成される。
【先行技術文献】
【特許文献】
【0003】
特開2019-036073号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
運搬車両は、作業現場の搬送路を走行する。搬送路の限られた道幅において運搬車両がすれ違うことができるように、第1走行コースと第2走行コースとの相対距離は、短い値に設定される。例えば搬送路の状況によって、運搬車両が走行コースから逸脱する可能性が高くなる範囲が搬送路に生じる場合がある。第1走行コースと第2走行コースとの相対距離が一律に設定された場合、運搬車両が走行コースから逸脱してしまうと、不測の事態が発生する可能性がある。不測の事態の発生により、作業現場の生産性が低下する可能性がある。
【0005】
本開示は、作業現場の生産性の低下を抑制することを目的とする。
【課題を解決するための手段】
【0006】
本開示に従えば、作業現場で稼働する運搬車両の第1走行コースを生成し、第1走行コースの隣に第2走行コースを生成する走行データ生成部と、所定範囲における第1走行コースと第2走行コースとの相対距離を変更する走行コースデータ調整部と、を備える、作業現場の管理システムが提供される。
【発明の効果】
【0007】
本開示によれば、作業現場の生産性の低下が抑制される。
【図面の簡単な説明】
【0008】
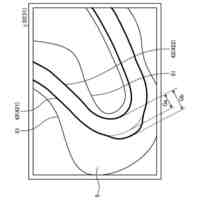
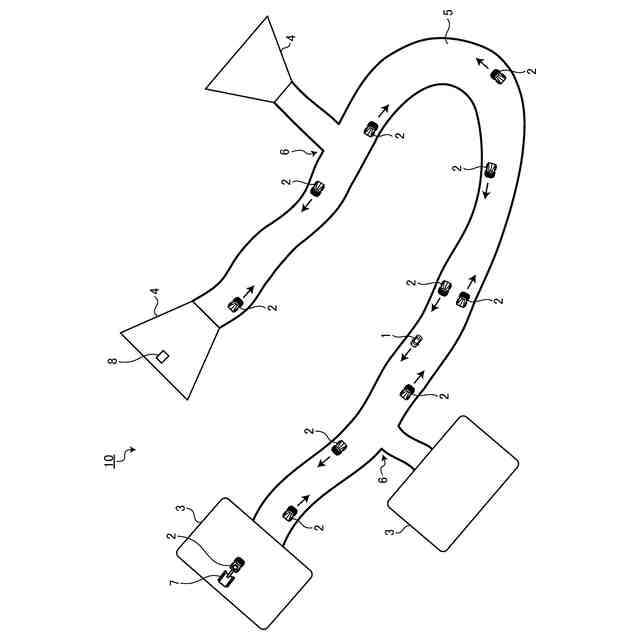
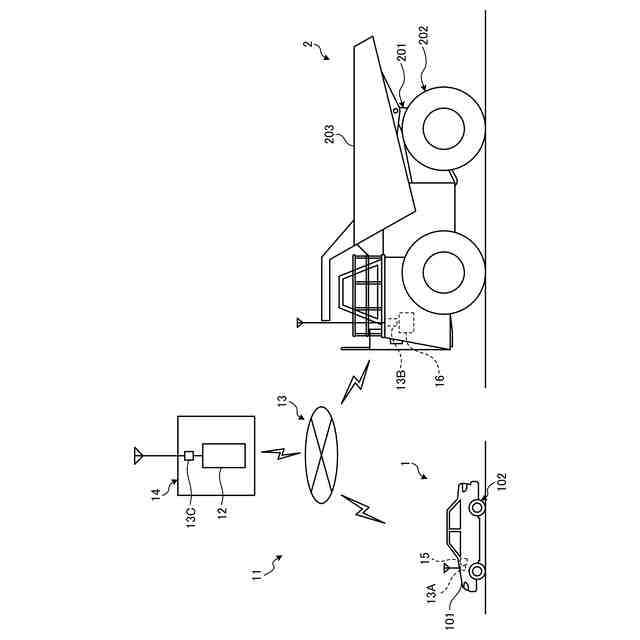
図1は、第1実施形態に係る作業現場を模式的に示す図である。
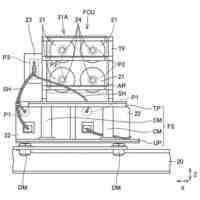
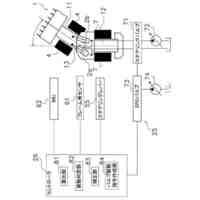
図2は、第1実施形態に係る作業現場の管理システムを模式的に示す図である。
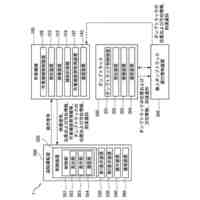
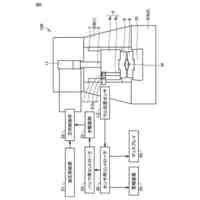
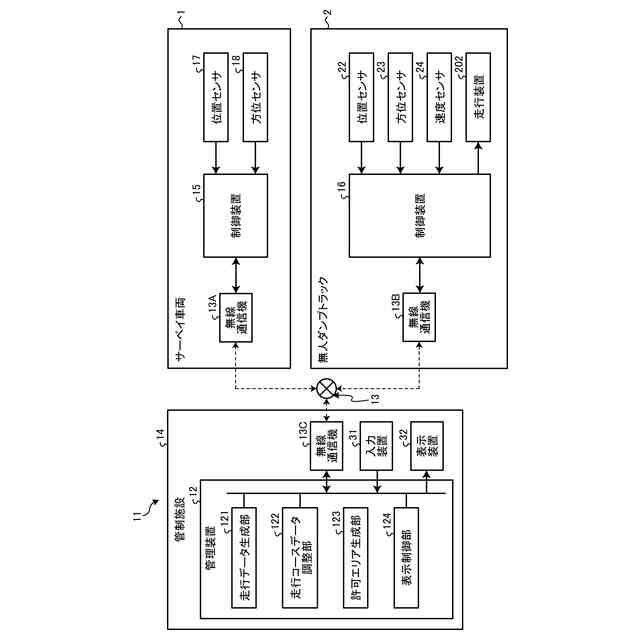
図3は、第1実施形態に係る作業現場の管理システムを示すブロック図である。
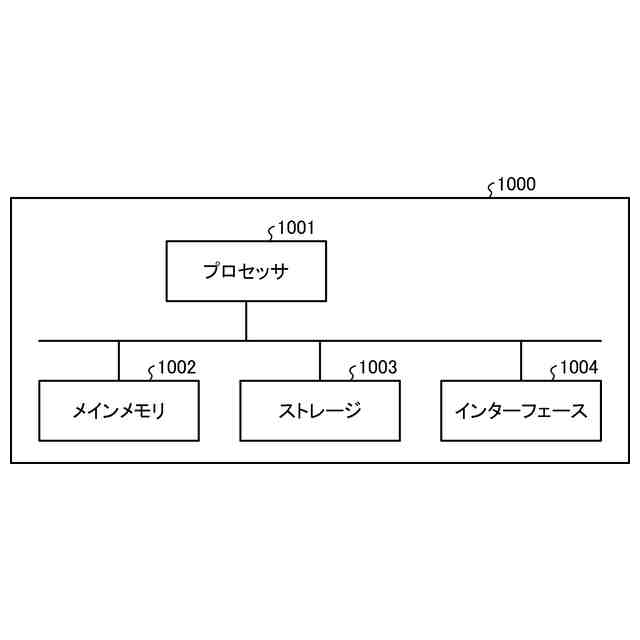
図4は、第1実施形態に係る管理装置のハードウエア構成図である。
図5は、第1実施形態に係る無人ダンプトラックの走行データを説明するための図である。
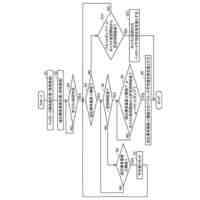
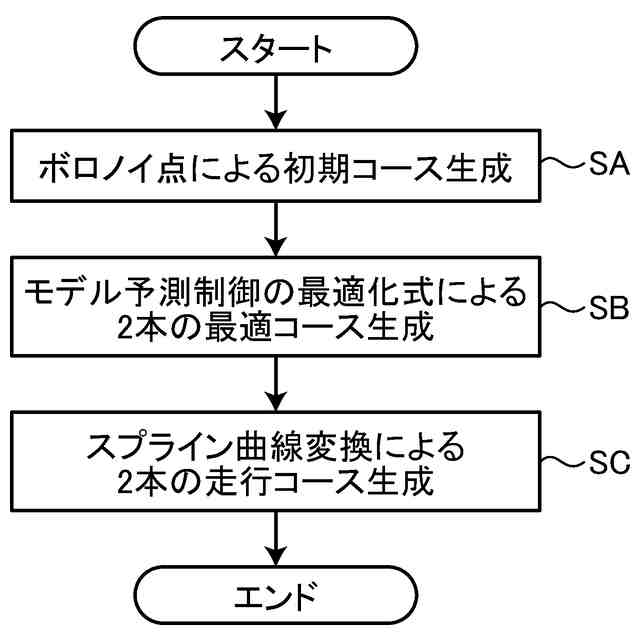
図6は、第1実施形態に係る走行コースの生成方法を示すフローチャートである。
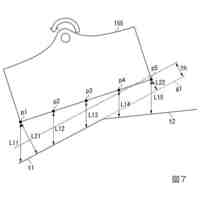
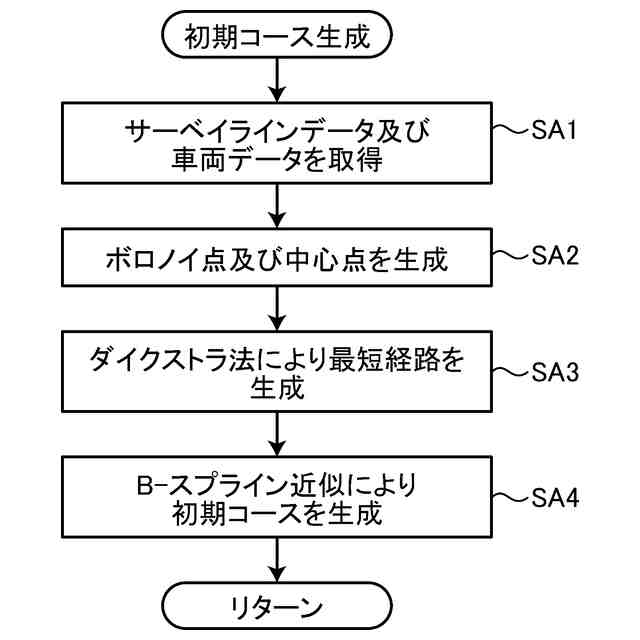
図7は、第1実施形態に係る初期コースの生成方法を示すフローチャートである。
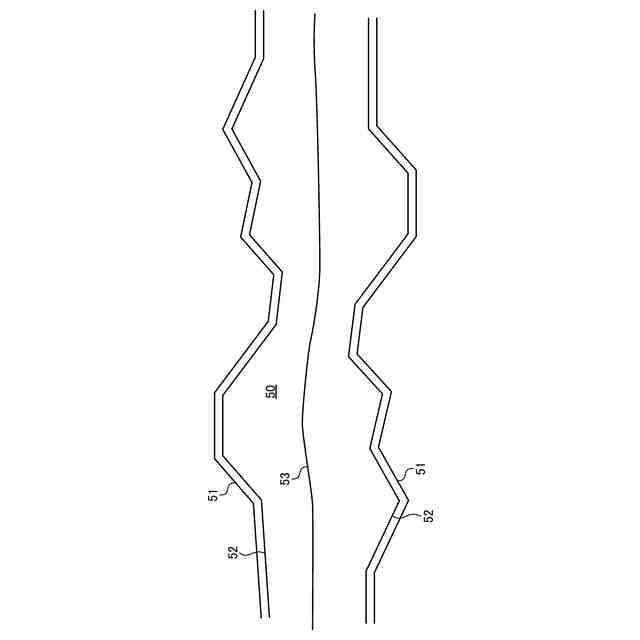
図8は、第1実施形態に係る初期コースの生成方法を説明するための図である。
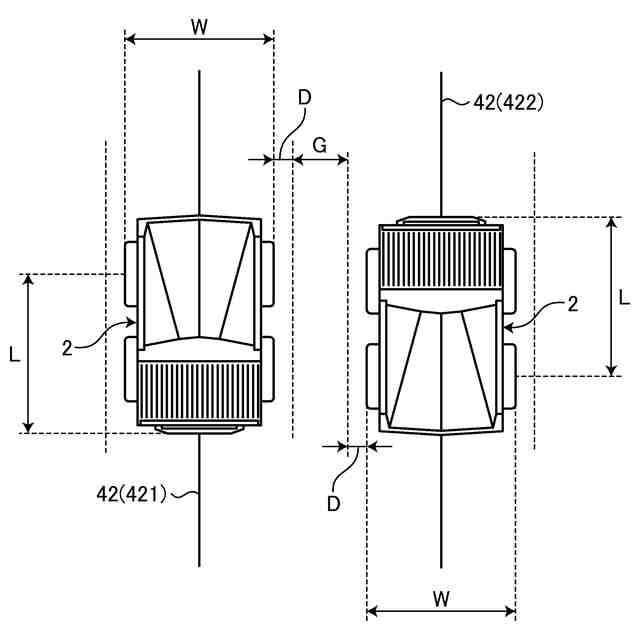
図9は、第1実施形態に係る拘束条件を説明するための図である。
図10は、第1実施形態に係る走行コースの生成方法を示すフローチャートである。
図11は、第1実施形態に係る走行コースの生成方法を説明するための図である。
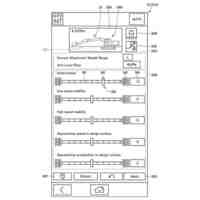
図12は、第1実施形態に係る表示装置に表示された走行コースを示す図である。
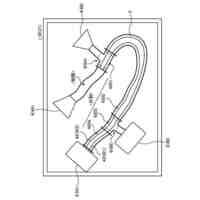
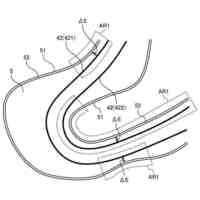
図13は、第1実施形態に係る走行コースの変更方法を説明するための図である。
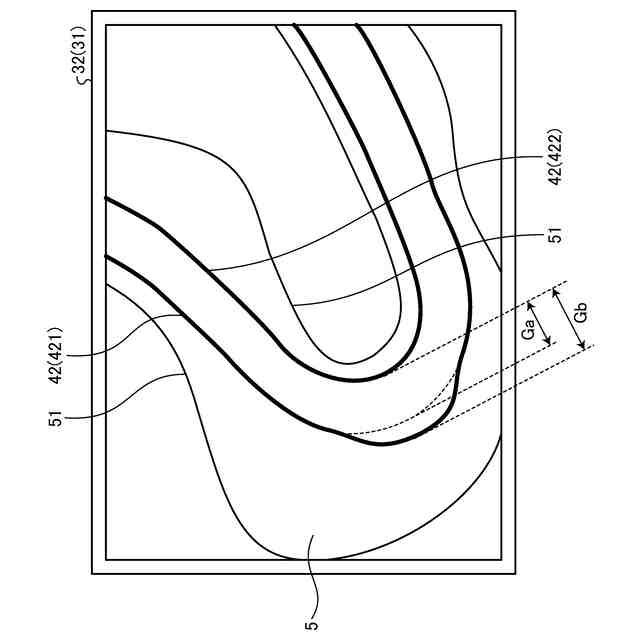
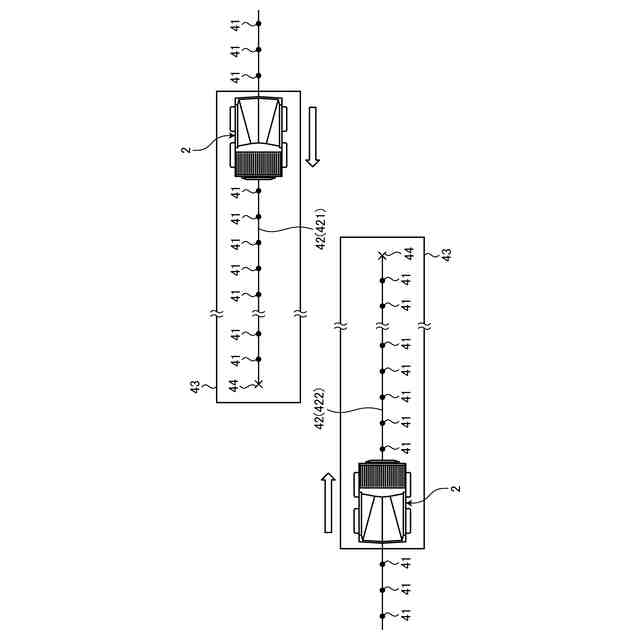
図14は、第1実施形態に係る走行コースの変更方法を説明するための図である。
図15は、第1実施形態に係る走行コースの変更方法を示すフローチャートである。
図16は、第2実施形態に係る走行コースの変更方法を説明するための図である。
【発明を実施するための形態】
【0009】
以下、本開示に係る実施形態について図面を参照しながら説明するが、本開示は実施形態に限定されない。以下で説明する実施形態の構成要素は適宜組み合わせることができる。また、一部の構成要素を用いない場合もある。
【0010】
[第1実施形態]
第1実施形態について説明する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社小松製作所
作業機械
3日前
株式会社小松製作所
作業車両
3日前
株式会社小松製作所
電動モータ及び作業機械
3日前
株式会社小松製作所
電動モータ及び作業機械
3日前
株式会社小松製作所
燃料電池ユニットおよび作業機械
2日前
株式会社小松製作所
作業機械および作業機械の制御方法
2日前
株式会社小松製作所
作業機械および作業機械の制御方法
今日
株式会社小松製作所
作業現場の管理システム及び作業現場の管理方法
1日前
株式会社小松製作所
作業現場の管理システム及び作業現場の管理方法
1日前
株式会社小松製作所
作業現場の管理システム及び作業現場の管理方法
1日前
株式会社小松製作所
作業機械の制御システムおよび作業機械の制御方法
1日前
株式会社小松製作所
表示制御装置、表示制御システムおよび表示制御方法
1日前
株式会社小松製作所
作業機械の動作特性調整システムおよび作業機械の動作特性調整方法
3日前
株式会社小松製作所
ハンマ鍛造装置における状態監視システム、状態監視装置および状態監視方法
18日前
株式会社小松製作所
作業機械の制御システムおよび作業機械の制御方法
22日前
エイブリック株式会社
基準電圧回路
1か月前
株式会社クボタ
作業車
1か月前
株式会社ダイフク
搬送車
1か月前
エイブリック株式会社
ボルテージレギュレータ
1か月前
トヨタ自動車株式会社
工作機械の制御装置
1か月前
三菱電機株式会社
自己位置推定装置
3日前
トヨタ自動車株式会社
工作機械の制御装置
1か月前
株式会社ダイフク
物品搬送設備
1か月前
株式会社やまびこ
走行制御装置
24日前
トヨタ自動車株式会社
移動体、及び制御方法
1日前
株式会社タブチ
減圧弁
18日前
WHILL株式会社
電動モビリティ
2日前
株式会社ダイヘン
搬送車
1か月前
株式会社ダイヘン
搬送車
1か月前
株式会社ダイヘン
搬送車
1か月前
株式会社ダイヘン
搬送車
1か月前
日本信号株式会社
自走式装置
8日前
株式会社ダイヘン
搬送車
1日前
井関農機株式会社
作業車両
1か月前
株式会社デンソー
診断装置
22日前
株式会社アイシン
自律移動体
8日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ