TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025068002
公報種別
公開特許公報(A)
公開日
2025-04-24
出願番号
2025022309,2023203304
出願日
2025-02-14,2019-11-27
発明の名称
作業機械の制御システムおよび作業機械の制御方法
出願人
株式会社小松製作所
代理人
弁理士法人志賀国際特許事務所
主分類
E02F
3/43 20060101AFI20250417BHJP(水工;基礎;土砂の移送)
要約
【課題】目標設計面に沿ってチルトバケットが移動するように、作業機を自動制御する。
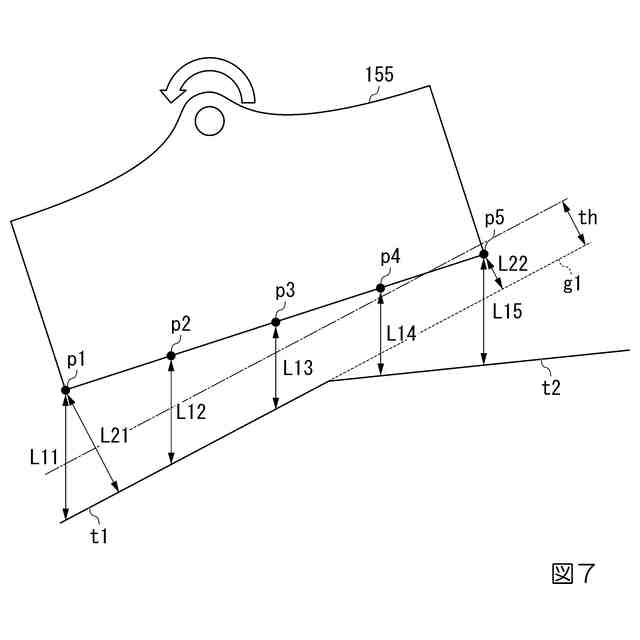
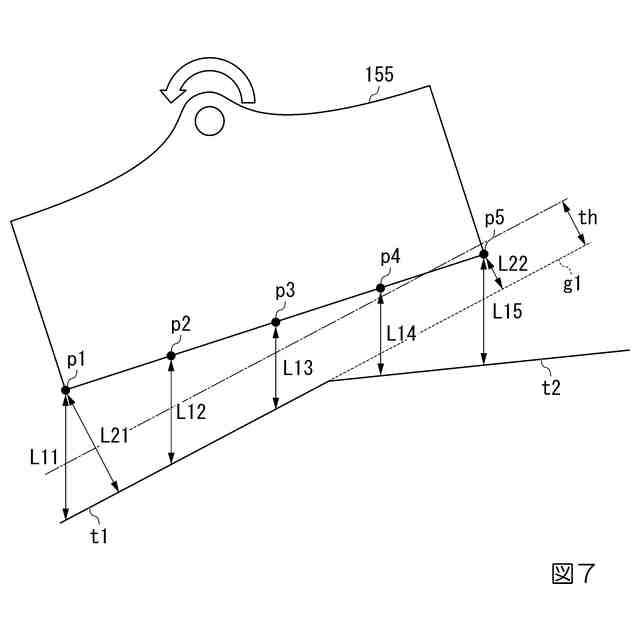
【解決手段】距離算出部は、バケット上の点である第1バケット点と掘削対象の目標形状を示す目標設計面との距離である第1距離を算出する。距離算出部は、第1バケット点を通りかつバケットの刃先に平行な直線上におけるバケット上の点である第2バケット点と目標設計面との距離である第2距離を算出する。チルト制御部は、第1距離と第2距離とを比較してバケットをチルト軸回りに回転させるチルト制御量を算出する。
【選択図】図7
特許請求の範囲
【請求項1】
ブーム軸回りに回転可能なブームと、前記ブーム軸と平行なアーム軸回りに回転可能なアームと、前記アーム軸と平行なバケット軸回りに回転可能かつ前記バケット軸と直交するチルト軸回りに回転可能なバケットと備える作業機械の制御システムであって、
前記バケット上の点である第1バケット点と掘削対象の目標形状を示す目標設計面との距離である第1距離、および前記第1バケット点を通りかつ前記バケットの刃先に平行な直線上における前記バケット上の点である第2バケット点と前記目標設計面との距離である第2距離を算出する距離算出部と、
前記第1距離と前記第2距離の少なくとも大きい方の値に基づいて前記バケットを前記チルト軸回りに回転させるチルト制御量を算出するチルト制御部と
を備える作業機械の制御システム。
続きを表示(約 1,400 文字)
【請求項2】
前記チルト制御部は、前記第1距離と前記第2距離との差が所定の閾値以下である場合に、前記チルト軸回りの回転を実施しない
請求項1に記載の作業機械の制御システム。
【請求項3】
前記第1バケット点および前記第2バケット点は、前記バケットの刃先の両端の点であり、
前記閾値は、前記目標設計面に対する高さの許容誤差以下の値である
請求項2に記載の作業機械の制御システム。
【請求項4】
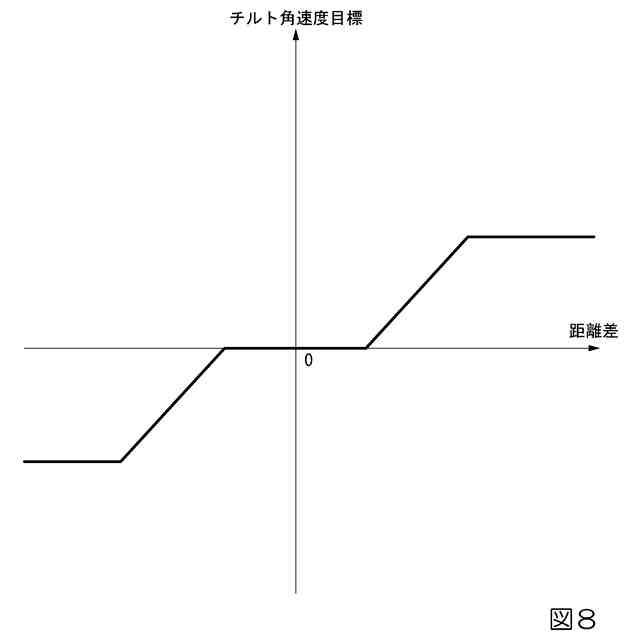
前記チルト制御部は、前記第1距離と前記第2距離との差に応じた角速度に係る前記チルト制御量を算出する
請求項1から請求項3の何れか1項に記載の作業機械の制御システム。
【請求項5】
前記目標設計面は、複数の多角形面によって構成され、
前記距離算出部は、前記目標設計面のうち前記バケットに対向する2以上の多角形面が存在する場合に、前記2以上の多角形面のうち1つを通る平面を特定し、前記第1距離として前記平面と前記第1バケット点との距離を算出し、前記第2距離として前記平面と前記第2バケット点との距離を算出する
請求項1から請求項4の何れか1項に記載の作業機械の制御システム。
【請求項6】
前記平面は、前記2以上の多角形面のうち、前記バケットとの距離が最も近い多角形面を通る
請求項5に記載の作業機械の制御システム。
【請求項7】
ブーム軸回りに回転可能なブームと、前記ブーム軸と平行なアーム軸回りに回転可能なアームと、前記アーム軸と平行なバケット軸回りに回転可能かつ前記バケット軸と直交するチルト軸回りに回転可能なバケットと備える作業機械の制御システムであって、
前記バケットの刃先と掘削対象の目標形状を示す目標設計面とが平行に近づくように、前記バケットを前記チルト軸回りに回転させるチルト制御量を算出し、前記バケットの刃先と掘削対象の目標形状を示す目標設計面とのなす角が所定の閾値以下である場合に、前記チルト軸回りの回転を停止させるチルト制御部
を備える作業機械の制御システム。
【請求項8】
ブーム軸回りに回転可能なブームと、
前記ブーム軸と平行なアーム軸回りに回転可能なアームと、
前記アーム軸と平行なバケット軸回りに回転可能かつ前記バケット軸と直交するチルト軸回りに回転可能なバケットと、
請求項1から請求項7の何れか1項に記載の作業機械の制御システムと
を備える作業機械。
【請求項9】
ブーム軸回りに回転可能なブームと、前記ブーム軸と平行なアーム軸回りに回転可能なアームと、前記アーム軸と平行なバケット軸回りに回転可能かつ前記バケット軸と直交するチルト軸回りに回転可能なバケットと備える作業機械の制御方法であって、
前記バケット上の点である第1バケット点と掘削対象の目標形状を示す目標設計面との距離である第1距離、および前記第1バケット点を通りかつ前記バケットの刃先に平行な直線上における前記バケット上の点である第2バケット点と前記目標設計面との距離である第2距離を算出するステップと、
前記第1距離と前記第2距離との少なくとも大きい方の値に基づいて前記バケットを前記チルト軸回りに回転させるチルト制御量を算出するステップと
を備える作業機械の制御方法。
発明の詳細な説明
【技術分野】
【0001】
本開示は、作業機械の制御システム、作業機械、および作業機械の制御方法に関する。
続きを表示(約 2,400 文字)
【背景技術】
【0002】
油圧ショベルに取り付けられるバケットとして、作業機の動作平面に対する角度を調整可能なチルトバケットが知られている(例えば、特許文献1を参照)チルトバケットは、動作平面に直交するバケット軸回りに回転可能、かつバケット軸に直交するチルト軸回りに回転可能に構成される。
【先行技術文献】
【特許文献】
【0003】
特開2014-74319号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、油圧ショベルのような作業機械においては、掘削対象の目標形状を示す目標設計面に沿ってバケットが移動するように、作業機を自動制御する技術が知られている。特許文献1に開示されるチルトバケットにおいても、目標設計面に沿ってチルトバケットが移動するように、作業機を自動制御することが望まれている。
本開示の目的は、目標設計面に沿ってチルトバケットが移動するように、作業機を自動制御する作業機械の制御システム、作業機械、および作業機械の制御方法を提供することにある。
【課題を解決するための手段】
【0005】
一の態様によれば、作業機械の制御システムは、ブーム軸回りに回転可能なブームと、前記ブーム軸と平行なアーム軸回りに回転可能なアームと、前記アーム軸と平行なバケット軸回りに回転可能かつ前記バケット軸と直交するチルト軸回りに回転可能なバケットと備える作業機械の制御システムであって、前記バケット上の点である第1バケット点と掘削対象の目標形状を示す目標設計面との距離である第1距離、および前記第1バケット点を通りかつ前記バケットの刃先に平行な直線上における前記バケット上の点である第2バケット点と前記目標設計面との距離である第2距離を算出する距離算出部と、前記第1距離と前記第2距離との少なくとも大きい方の値に基づいて前記バケットを前記チルト軸回りに回転させるチルト制御量を算出するチルト制御部とを備える。
【発明の効果】
【0006】
上記態様によれば、作業機械の制御システムは、目標設計面に沿ってチルトバケットが移動するように、作業機を自動制御することができる。
【図面の簡単な説明】
【0007】
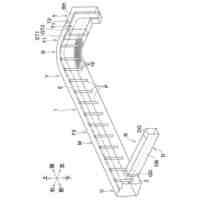
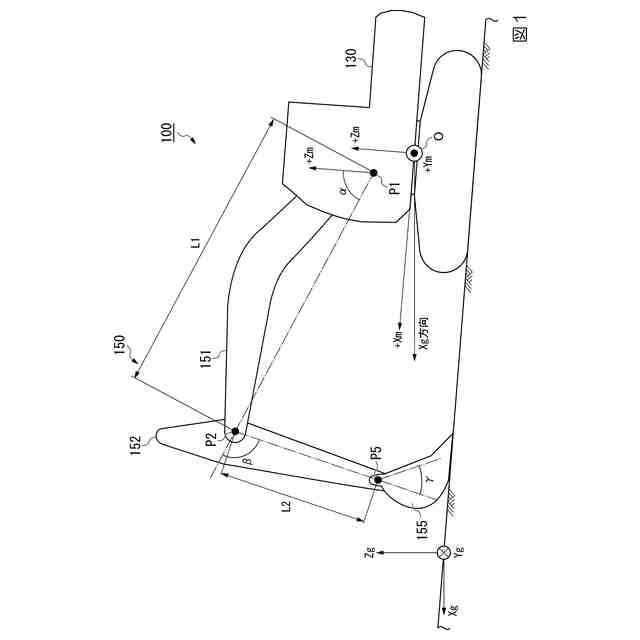
作業機械および作業機の姿勢の例を示す図である。
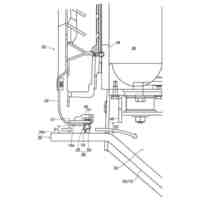
第1の実施形態に係る作業機械の構成を示す概略図である。
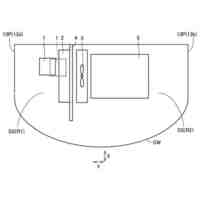
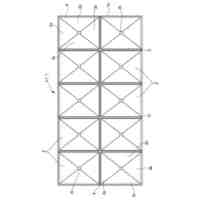
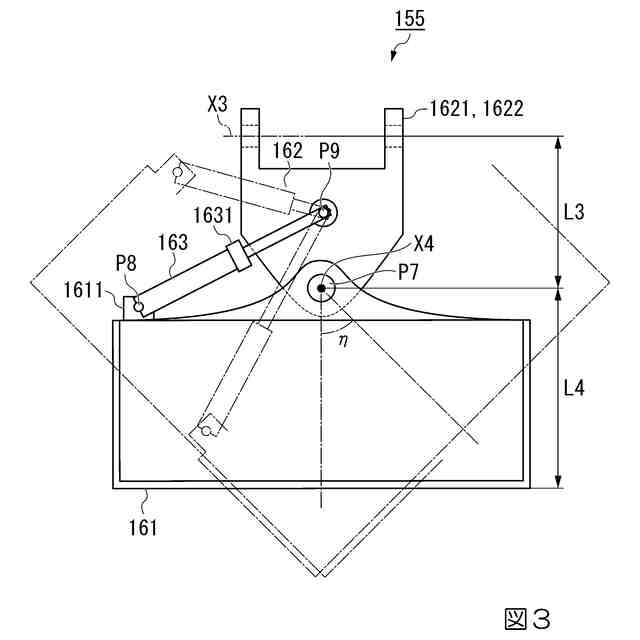
第1の実施形態に係るバケットの構成を示す正面図である。
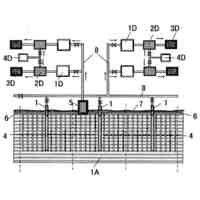
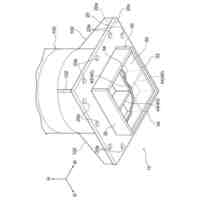
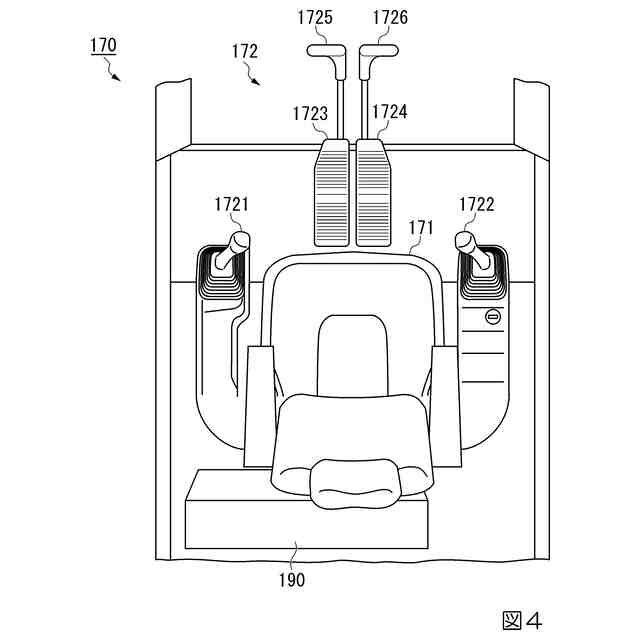
第1の実施形態に係る運転室の内部の構成を示す図である。
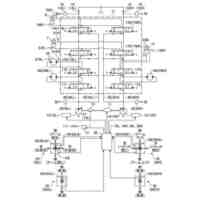
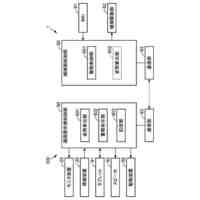
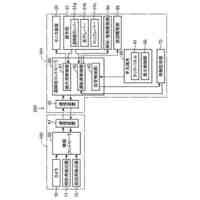
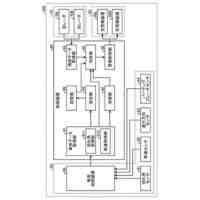
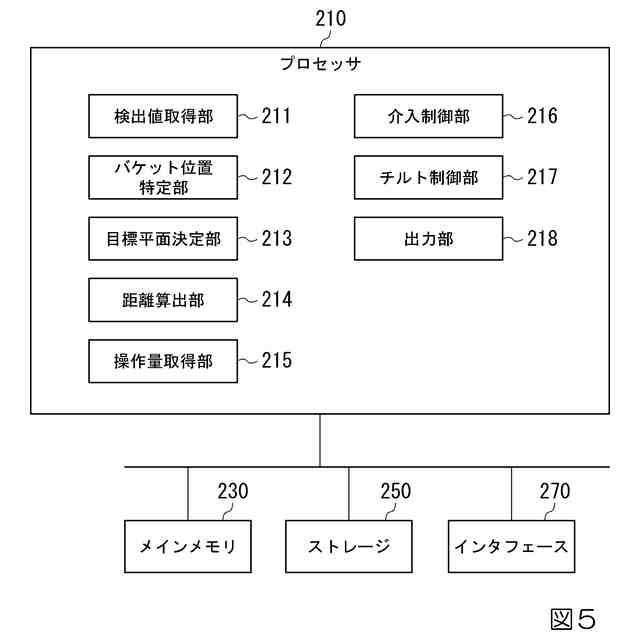
第1の実施形態に係る制御装置の構成を示す概略ブロック図である。
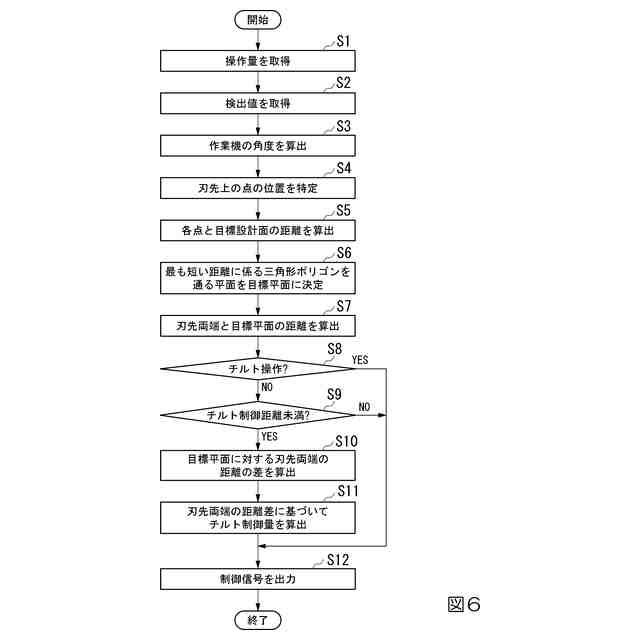
第1の実施形態に係る制御装置の動作を示すフローチャートである。
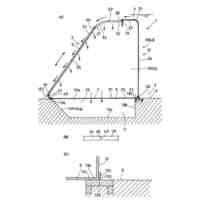
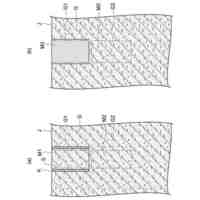
チルト自動制御における目標設計面と刃先上の点との関係を示す図である。
第1の実施形態に係るバケットの距離差とチルト角速度の目標値の関係を示すチルト関数の例を示す図である。
【発明を実施するための形態】
【0008】
〈座標系〉
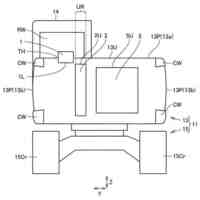
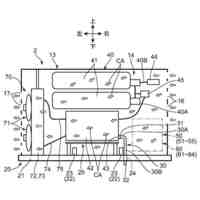
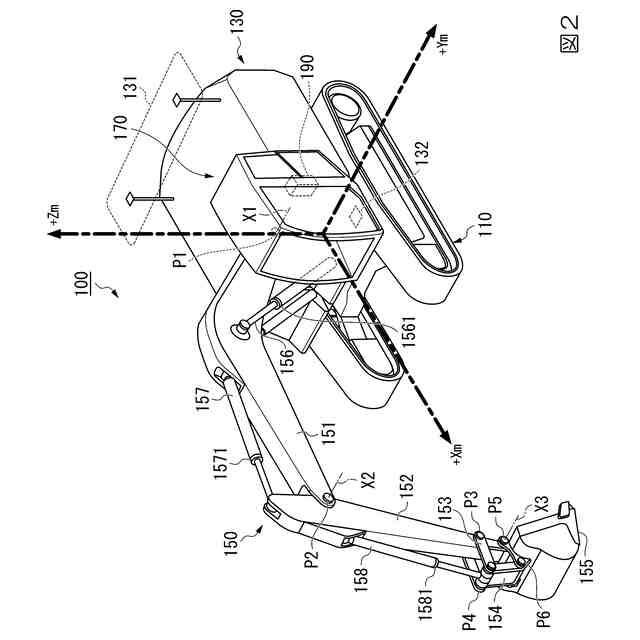
図1は、作業機械100および作業機150の姿勢の例を示す図である。
以下の説明においては、三次元の現場座標系(Xg、Yg、Zg)および三次元の車体座標系(Xm、Ym、Zm)を規定して、これらに基づいて位置関係を説明する。
【0009】
現場座標系は、施工現場に設けられたGNSS(Global Navigation Satellite System)基準局の位置を基準点として南北に伸びるXg軸、東西に伸びるYg軸、鉛直方向に伸びるZg軸から構成される座標系である。GNSSの例としては、GPS(Global Positioning System)が挙げられる。なお、他の実施形態においては、現場座標系に代えて緯度および経度などで表されるグローバル座標系を用いてもよい。
車体座標系は、作業機械100の旋回体130に規定された代表点Oを基準として、後述する運転室170内のオペレータの着座位置から見て前後に伸びるXm軸、左右に伸びるYm軸、上下に伸びるZm軸から構成される座標系である。旋回体130の代表点Oを基準として前方を+Xm方向、後方を-Xm方向、左方を+Ym方向、右方を-Ym方向、上方向を+Zm方向、下方向を-Zm方向とよぶ。
現場座標系と車体座標系とは、現場座標系における作業機械100の位置および傾きを特定することで、互いに変換することができる。
【0010】
〈第1の実施形態〉
《作業機械100の構成》
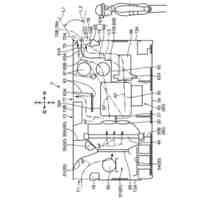
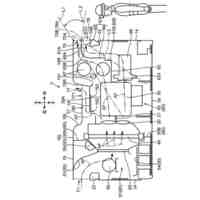
図2は、第1の実施形態に係る作業機械100の構成を示す概略図である。
作業機械100は、施工現場にて稼働し、土砂などの掘削対象を施工する。第1の実施形態に係る作業機械100は、油圧ショベルである。
作業機械100は、走行体110、旋回体130、作業機150、運転室170、制御装置190を備える。
走行体110は、作業機械100を走行可能に支持する。走行体110は、例えば左右1対の無限軌道である。旋回体130は、走行体110に旋回中心回りに旋回可能に支持される。作業機150は、油圧により駆動する。作業機150は、旋回体130の前部に上下方向に駆動可能に支持される。運転室170は、オペレータが搭乗し、作業機械100の操作を行うためのスペースである。運転室170は、旋回体130の前部に設けられる。制御装置190は、オペレータの操作に基づいて、走行体110、旋回体130、および作業機150を制御する。制御装置190は、例えば運転室170の内部に設けられる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社小松製作所
作業機械の制御システム、作業機械及び作業機械の制御方法
5日前
個人
インプラント杭
4日前
個人
透過型堰堤
25日前
鹿島建設株式会社
鉄筋かご
23日前
株式会社竹中工務店
壁接合工法
11日前
中部電力株式会社
沈砂池
23日前
住友建機株式会社
ショベル
10日前
株式会社エコ・プランナー
取水装置
10日前
コベルコ建機株式会社
操作装置
11日前
中部美化企業株式会社
水門装置
17日前
株式会社奥村組
建物の基礎構造
17日前
コベルコ建機株式会社
作業機械
23日前
コベルコ建機株式会社
作業機械
23日前
コベルコ建機株式会社
作業機械
23日前
住友重機械工業株式会社
作業機械
10日前
株式会社プラント・ツリース
杭基礎構造
3日前
株式会社ダイトー
護岸コンクリートの補修構造
10日前
越後商事株式会社
ツース盤
6日前
鹿島建設株式会社
設備架台の施工方法
4日前
東陽商事株式会社
スイベルの共回り防止装置
25日前
個人
狭小水域浚渫システムおよび方法
3日前
プレス工業株式会社
建設機械のキャビン
23日前
個人
大規模真空沸騰圧密工法と大深度気水分離タンク
10日前
鹿島建設株式会社
杭施工方法
4日前
株式会社小松製作所
作業機械
12日前
株式会社小松製作所
作業車両
12日前
株式会社竹内製作所
土砂侵入防止構造
17日前
マックストン株式会社
シート敷設用アンカーブロック
24日前
キヤノン株式会社
移動体および撮像装置
12日前
株式会社竹中工務店
柱脚構造
24日前
コベルコ建機株式会社
操作装置及び操作システム
11日前
コベルコ建機株式会社
建設機械
23日前
株式会社アイガー産業
止水装置
3日前
株式会社みつば電気
水力発電設備
13日前
フリー工業株式会社
擁壁及び擁壁の施工方法
23日前
株式会社大林組
施工管理システム及び施工管理方法
10日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ