TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025073272
公報種別
公開特許公報(A)
公開日
2025-05-13
出願番号
2023183899
出願日
2023-10-26
発明の名称
作業機械の動作特性調整システムおよび作業機械の動作特性調整方法
出願人
株式会社小松製作所
代理人
弁理士法人深見特許事務所
主分類
E02F
9/20 20060101AFI20250502BHJP(水工;基礎;土砂の移送)
要約
【課題】アクチュエータの出力特性調整後における作業機械の挙動確認の手間が少ない作業機械の動作特性調整システムおよび作業機械の動作特性調整方法を提供する。
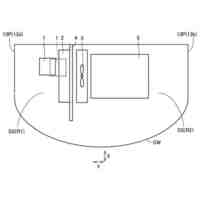
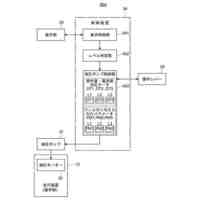
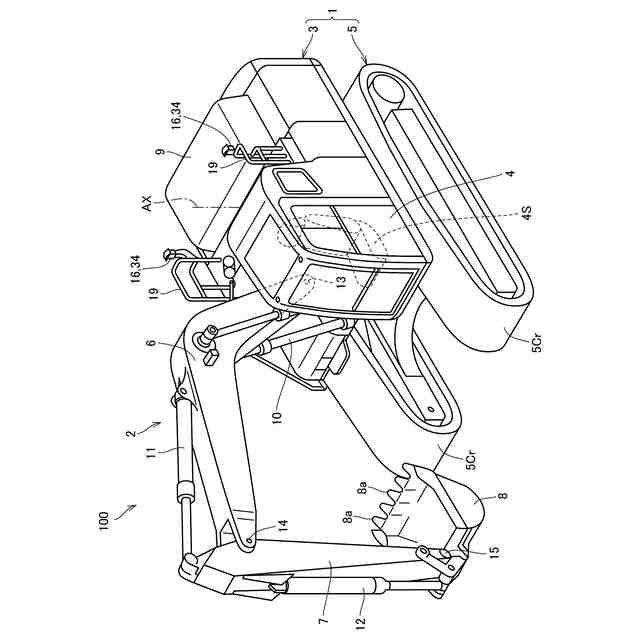
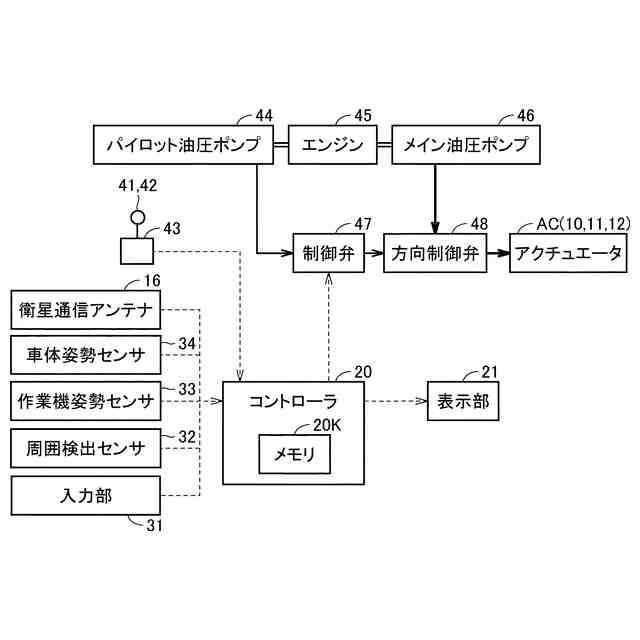
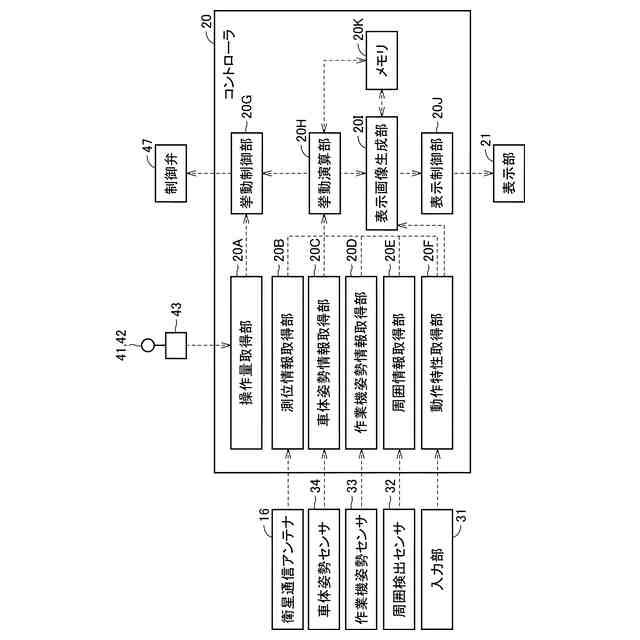
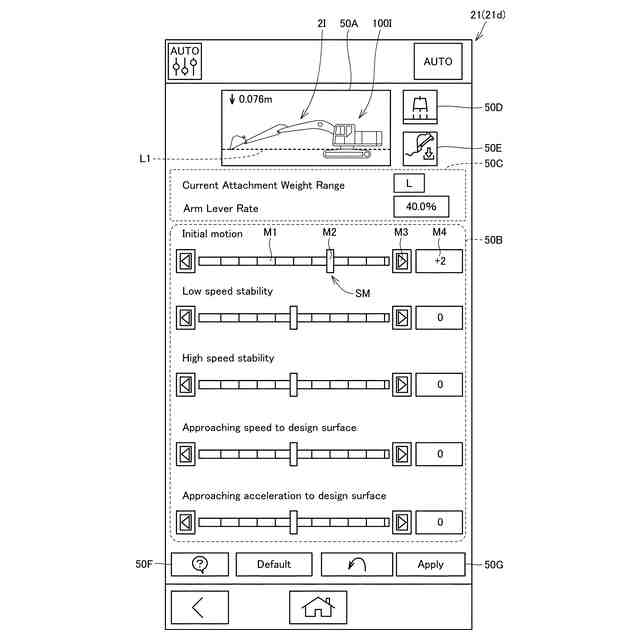
【解決手段】作業機2はアクチュエータACを含む。入力部31は、作業機2におけるアクチュエータACの動作特性を入力する。コントローラ20は、入力部31に入力されたアクチュエータACの動作特性に基づいて作業機2の挙動を演算し、動作特性を入力するための入力画面50Bと演算された作業機2の挙動を示す挙動画面50Aとを表示面21dに同時に表示するよう表示部21を制御する。
【選択図】図6
特許請求の範囲
【請求項1】
アクチュエータを含む作業機と、
前記作業機における前記アクチュエータの動作特性を入力する入力部と、
表示面を有する表示部と、
前記入力部に入力された前記アクチュエータの前記動作特性に基づいて前記作業機の挙動を演算し、前記動作特性を入力するための入力画面と演算された前記作業機の挙動を示す挙動画面とを前記表示面に同時に表示するよう前記表示部を制御するコントローラと、を備えた、作業機械の動作特性調整システム。
続きを表示(約 930 文字)
【請求項2】
前記作業機は刃先を有し、
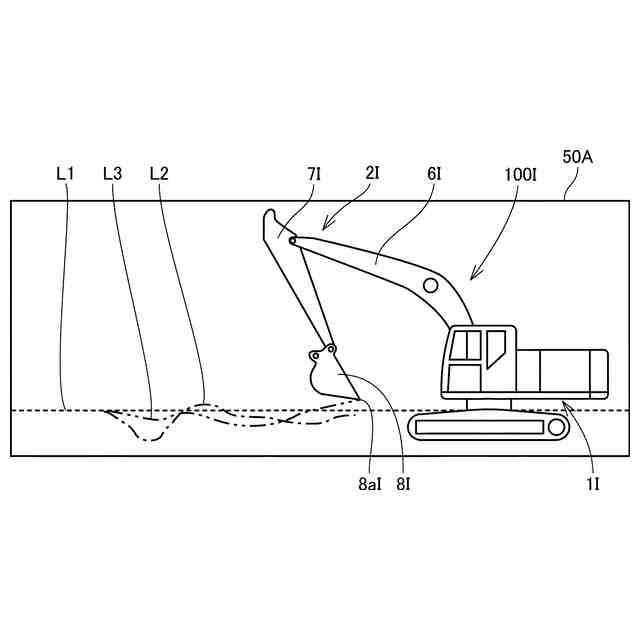
前記挙動画面は、前記刃先の軌跡を示す、請求項1に記載の作業機械の動作特性調整システム。
【請求項3】
ボタンをさらに備え、
前記コントローラは、前記ボタンの操作により、前記挙動画面における前記刃先の軌跡の表示を開始または停止する、請求項2に記載の作業機械の動作特性調整システム。
【請求項4】
前記コントローラは、前記ボタンの操作により、前記刃先の軌跡の記憶を開始または停止する、請求項3に記載の作業機械の動作特性調整システム。
【請求項5】
前記コントローラは、前記刃先の軌跡として前記動作特性の調整前における第1刃先軌跡と前記動作特性の調整後における第2刃先軌跡とを前記挙動画面に同時に表示するよう前記表示部を制御する、請求項2に記載の作業機械の動作特性調整システム。
【請求項6】
前記挙動画面は、前記作業機の挙動の基準となる目標ラインを表示する、請求項2に記載の作業機械の動作特性調整システム。
【請求項7】
前記挙動画面は、前記目標ラインに対する前記刃先の軌跡を表示する、請求項6に記載の作業機械の動作特性調整システム。
【請求項8】
前記アクチュエータの前記動作特性は、自動制御において予め決められた前記目標ラインに対する前記刃先の移動速度を変動させるための前記作業機の挙動のパラメータである、請求項6に記載の作業機械の動作特性調整システム。
【請求項9】
前記コントローラは、前記入力部に入力された前記動作特性と、前記動作特性の入力時におけるオペレータ情報とを関連付けて記憶する、請求項1に記載の作業機械の動作特性調整システム。
【請求項10】
作業機のアクチュエータにおける動作特性を取得するステップと、
取得した前記動作特性に基づいて前記作業機の挙動を演算するステップと、
演算された前記作業機の挙動に関する挙動画面を、前記動作特性の入力画面とともに表示面に同時に表示するよう表示部を制御するステップと、を備えた、作業機械の動作特性調整方法。
発明の詳細な説明
【技術分野】
【0001】
本開示は、作業機械の動作特性調整システムおよび作業機械の動作特性調整方法に関する。
続きを表示(約 1,100 文字)
【背景技術】
【0002】
作業機械では、同一の作業機械を多くのオペレータによって使用する場合がある。作業機械におけるアクチュエータの出力特性が一定である場合、オペレータによっては応答性が悪いと感じたり、別のオペレータによっては逆に応答性が良すぎると感じる可能性もある。
【0003】
当該課題の解決のため、たとえば国際公開第2017/168687号(特許文献1)には、アクチュエータの出力特性を変更する技術が開示されている。上記文献では、オペレータ情報と車体情報とからオペレータの望む操作性に合致した出力特性情報が抽出されることでアクチュエータの出力特性が変更される。
【先行技術文献】
【特許文献】
【0004】
国際公開第2017/168687号
【発明の概要】
【発明が解決しようとする課題】
【0005】
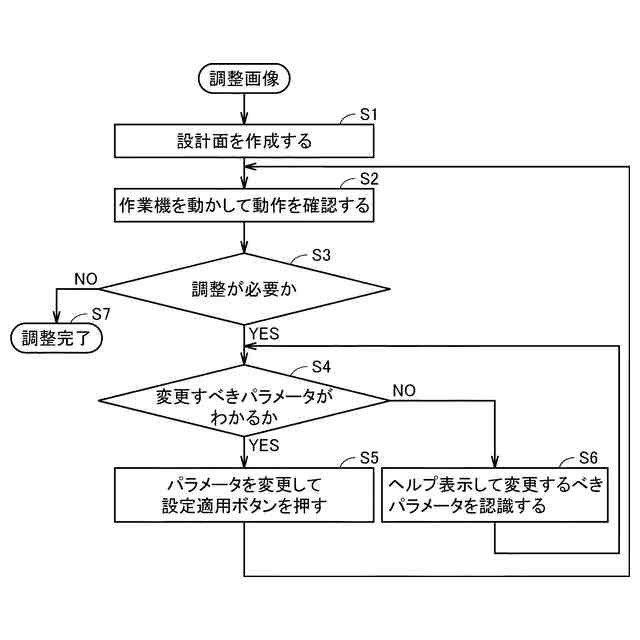
しかしながらアクチュエータの出力特性を調整した後に、制御特性調整画面からいちいち抜けて作業機械の挙動を確認する手間を省きたいとの要望があった。
【0006】
本開示の目的は、アクチュエータの出力特性調整後における作業機械の挙動確認の手間が少ない作業機械の動作特性調整システムおよび作業機械の動作特性調整方法を提供することである。
【課題を解決するための手段】
【0007】
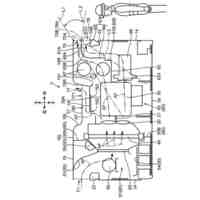
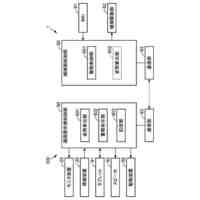
本開示の作業機械の動作特性調整システムは、作業機と、入力部と、表示部と、コントローラとを備える。作業機はアクチュエータを含む。入力部は、作業機におけるアクチュエータの動作特性を入力する。表示部は表示面を有する。コントローラは、入力部に入力されたアクチュエータの動作特性に基づいて作業機の挙動を演算し、動作特性を入力するための入力画面部と演算された作業機の挙動を示す挙動画面とを表示面に同時に表示するよう表示部を制御する。
【0008】
本開示の作業機械の動作特性調整方法は以下のステップを備える。
【0009】
作業機のアクチュエータにおける動作特性が取得される。取得した動作特性に基づいて作業機の挙動が演算される。演算された作業機の挙動に関する挙動画面を、動作特性の入力画面とともに表示面に同時に表示するよう表示部が制御される。
【発明の効果】
【0010】
本開示によれば、アクチュエータの出力特性調整後における作業機械の挙動確認の手間が少ない作業機械の動作特性調整システムおよび作業機械の動作特性調整方法を実現することができる。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
鹿島建設株式会社
鉄筋かご
12日前
株式会社竹中工務店
壁接合工法
今日
中部電力株式会社
沈砂池
12日前
中部美化企業株式会社
水門装置
6日前
株式会社奥村組
建物の基礎構造
6日前
コベルコ建機株式会社
作業機械
12日前
コベルコ建機株式会社
作業機械
12日前
コベルコ建機株式会社
操作装置
今日
コベルコ建機株式会社
作業機械
12日前
プレス工業株式会社
建設機械のキャビン
12日前
株式会社小松製作所
作業機械
1日前
株式会社竹内製作所
土砂侵入防止構造
6日前
株式会社小松製作所
作業車両
1日前
マックストン株式会社
シート敷設用アンカーブロック
13日前
キヤノン株式会社
移動体および撮像装置
1日前
株式会社竹中工務店
柱脚構造
13日前
コベルコ建機株式会社
操作装置及び操作システム
今日
フリー工業株式会社
擁壁及び擁壁の施工方法
12日前
株式会社荒谷建設コンサルタント
水力駆動除塵装置
1日前
コベルコ建機株式会社
建設機械
12日前
株式会社みつば電気
水力発電設備
2日前
住友重機械工業株式会社
作業機械の遠隔操作システム
13日前
株式会社竹内製作所
作業用車両動作制御システム
今日
住友重機械工業株式会社
作業支援システム及び作業機械
12日前
株式会社竹内製作所
作業用車両の動作制御システム
今日
株式会社竹内製作所
作業用車両の動作制御システム
今日
株式会社トラバース
地盤改良材用ホースの巻取器及び地盤改良機
1日前
株式会社竹内製作所
作業用車両用ユーザ管理システム
今日
株式会社エヌ・エス・ピー
支持具
13日前
株式会社エヌ・エス・ピー
支持具
13日前
株式会社竹中工務店
コンクリート基礎構造
5日前
コベルコ建機株式会社
作業機械目標動作設定システム
今日
大嘉産業株式会社
水硬性マット
6日前
積水ハウス株式会社
道路終端部の修景方法および道路終端部の構造
1日前
強化土エンジニヤリング株式会社
地盤注入工法および地盤注入装置
1日前
株式会社小松製作所
燃料電池ユニットおよび作業機械
今日
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ