TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025069532
公報種別
公開特許公報(A)
公開日
2025-05-01
出願番号
2023179306
出願日
2023-10-18
発明の名称
作業機械の遠隔操作システム
出願人
住友重機械工業株式会社
代理人
個人
,
個人
主分類
E02F
9/20 20060101AFI20250423BHJP(水工;基礎;土砂の移送)
要約
【課題】遠隔操作における安全性を向上させる。
【解決手段】作業機械と、前記作業機械の遠隔操作を支援する外部装置と、を有する作業機械の遠隔操作システムであって、前記作業機械は、前記外部装置から受信した操作信号が示す第一の指令値と、前記作業機械の油圧アクチュエータに供給される作動油の流量を制御する第二の指令値とに差分をうめるための処理を実行する制御装置を有する、作業機械の遠隔操作システムである。
【選択図】図1
特許請求の範囲
【請求項1】
作業機械と、前記作業機械の遠隔操作を支援する外部装置と、を有する作業機械の遠隔操作システムであって、
前記作業機械は、
前記外部装置から受信した操作信号が示す第一の指令値と、前記作業機械の油圧アクチュエータに供給される作動油の流量を制御する第二の指令値とに差分をうめるための処理を実行する制御装置を有する、作業機械の遠隔操作システム。
続きを表示(約 860 文字)
【請求項2】
前記差分をうめるための処理は、
前記第二の指令値を、予め指定された一定期間が経過した時に、前記第一の指令値に一致するように徐々に前記第一の指令値に近づける追従処理である、請求項1記載の作業機械の遠隔操作システム。
【請求項3】
前記差分をうめるための処理は、
前記外部装置に設けられた、前記作業機械を遠隔操作するための入力を受け付ける遠隔操作レバーを中立とする操作を促す通知を、前記外部装置に送信する通知処理である、請求項1記載の作業機械の遠隔操作システム。
【請求項4】
前記外部装置は、表示装置を含み、
前記遠隔操作レバーを中立とする操作を促す通知は、前記表示装置に表示される、請求項3記載の作業機械の遠隔操作システム。
【請求項5】
前記制御装置は、
前記第一の指令値と前記第二の指令値との差分が所定値以上である場合に、前記外部装置に設けられた、前記作業機械を遠隔操作するための入力を受け付ける遠隔操作レバーを中立とする操作を促す通知を前記外部装置に送信する通知処理を実行し、
前記第一の指令値と前記第二の指令値との差分が所定値未満である場合に、前記第二の指令値を、予め指定された一定期間が経過した時に、前記第一の指令値に一致するように徐々に前記第一の指令値に近づける追従処理を実行する、請求項1記載の作業機械の遠隔操作システム。
【請求項6】
前記差分をうめるための処理は、
前記制御装置が、前記操作信号を受信した時に実行される、請求項1又は2記載の作業機械の遠隔操作システム。
【請求項7】
前記差分をうめるための処理は、
前記制御装置が、前記操作信号を受信している最中であり、且つ、前記作業機械に対する操作が無効となる状態において、前記作業機械に対する操作が有効となる状態に切り換えられた時に実行される、請求項1又は2記載の作業機械の遠隔操作システム。
発明の詳細な説明
【技術分野】
【0001】
本開示は、作業機械の遠隔操作システムに関する。
続きを表示(約 1,100 文字)
【背景技術】
【0002】
従来では、ショベルの外部に設置された操作装置に対する操作を示す操作信号をショベルに送信し、ショベルを動作させる遠隔操作システムが知られている。
【先行技術文献】
【特許文献】
【0003】
国際公開2020/101004号
【発明の概要】
【発明が解決しようとする課題】
【0004】
上述した従来の技術では、例えば、ショベルと遠隔操作室との通信開始時等に、意図しない操作信号が入力された場合、ショベルは、操作信号が示す指令値に応じて急な動作を行う可能性がある。
【0005】
本開示は、上記の事情に鑑みてなされたものであり、遠隔操作における安全性を向上させることを目的とする。
【課題を解決するための手段】
【0006】
本発明の実施形態に係る作業機械の遠隔操作システムは、作業機械と、前記作業機械の遠隔操作を支援する外部装置と、を有する作業機械の遠隔操作システムであって、前記作業機械は、前記外部装置から受信した操作信号が示す第一の指令値と、前記作業機械の油圧アクチュエータに供給される作動油の流量を制御する第二の指令値とに差分をうめるための処理を実行する制御装置を有する、作業機械の遠隔操作システムである。
【発明の効果】
【0007】
遠隔操作における安全性を向上させることができる。
【図面の簡単な説明】
【0008】
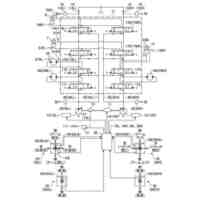
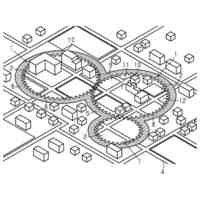
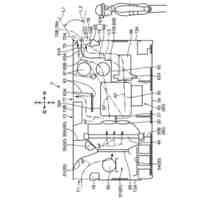
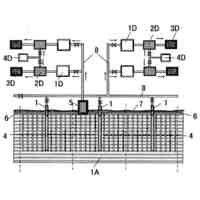
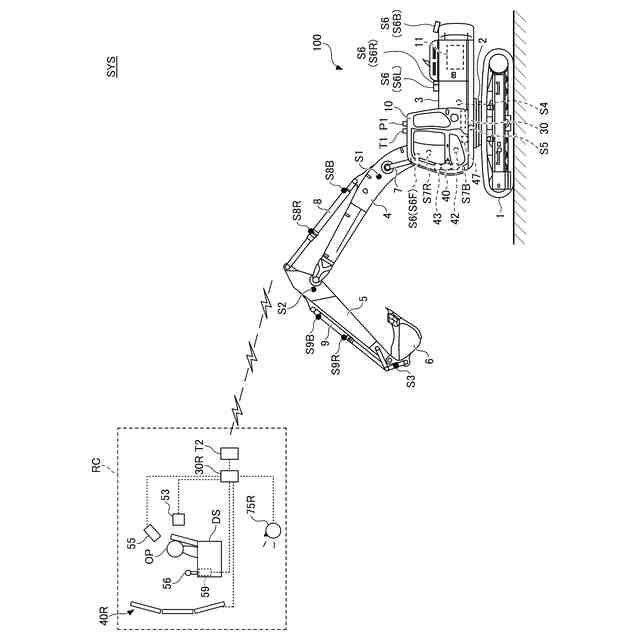
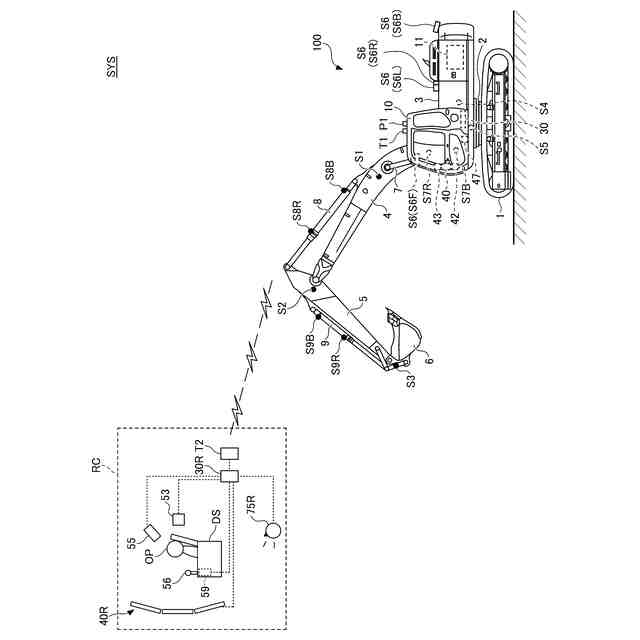
ショベルの遠隔操作システムのシステム構成の一例を示す図である。
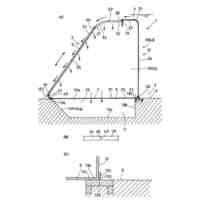
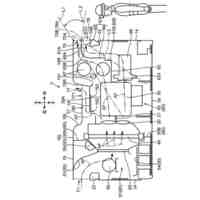
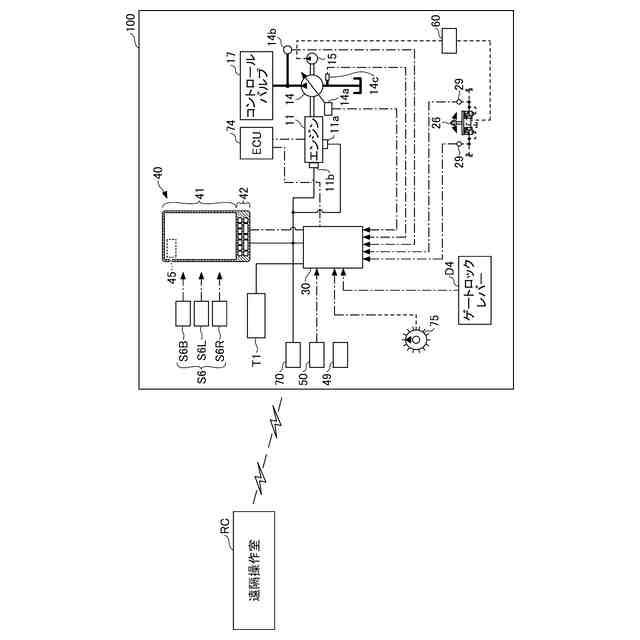
ショベルの基本システムについて説明する図である。
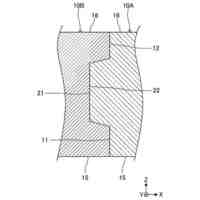
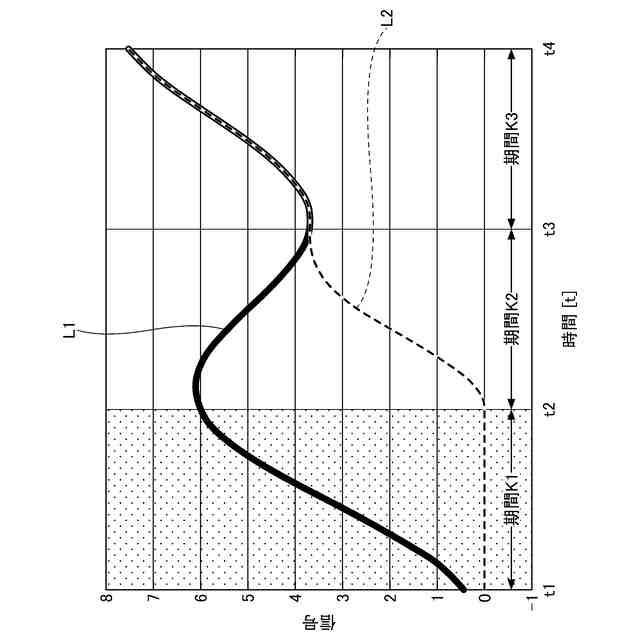
通信の状態と、第一の指令値及び第二の指令値との関係について説明する図である。
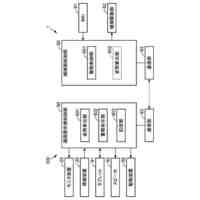
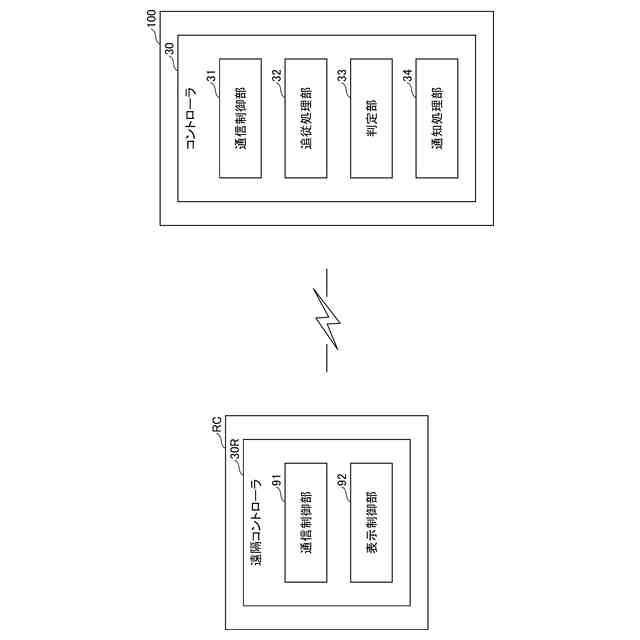
遠隔操作システムの機能構成について説明する図である。
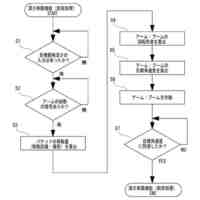
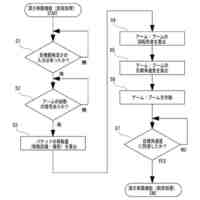
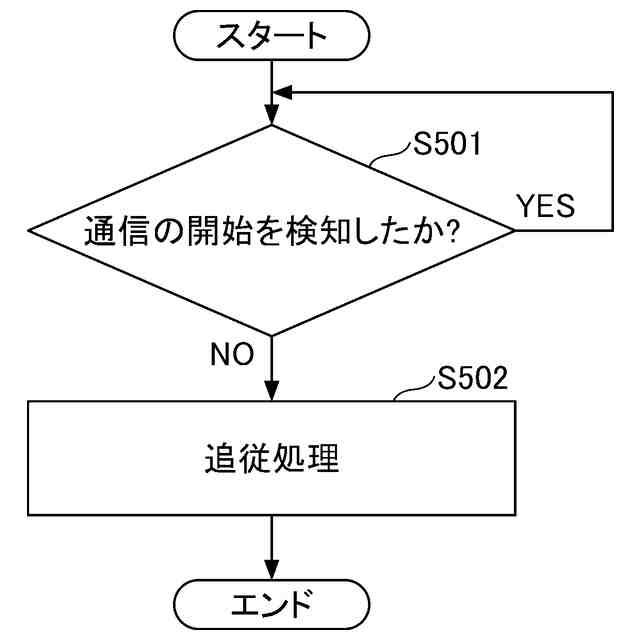
ショベルの動作を示す第一のフローチャートである。
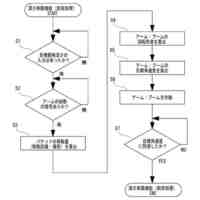
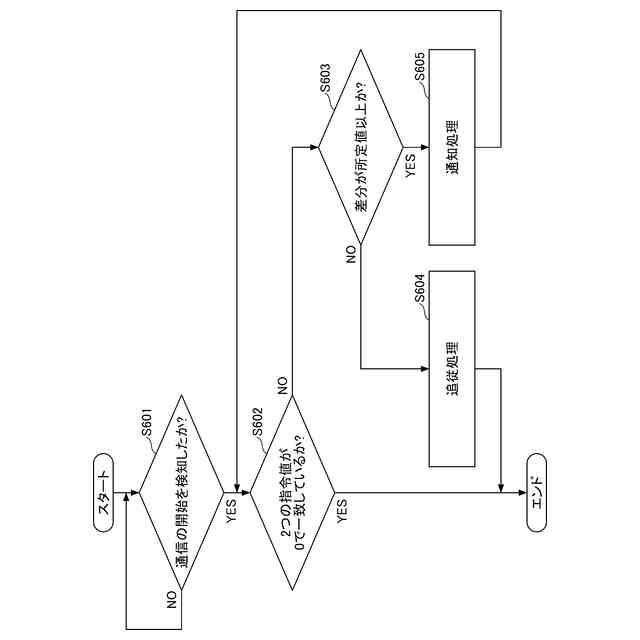
ショベルの動作を示す第二のフローチャートである。
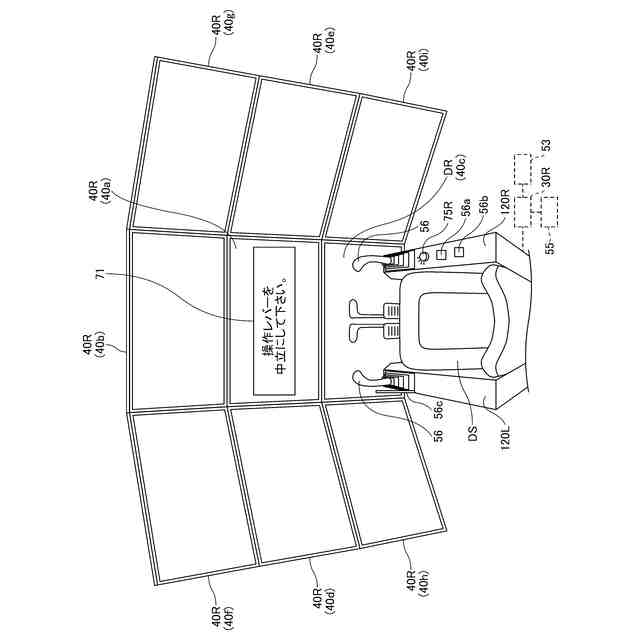
遠隔操作室の表示装置の表示例を示す図である。
【発明を実施するための形態】
【0009】
以下に、図面を参照して、本実施形態について説明する。図1は、ショベルの遠隔操作システムのシステム構成の一例を示す図である。
【0010】
本実施形態の遠隔操作システムSYSは、遠隔操作室RCと、ショベル100とを含む。遠隔操作室RCは、ショベル100と所定のネットワークを介して通信を行う。ショベル100は、遠隔操作室RCから送信される操作信号に応じて操作される作業機械の一例である。なお、本実施形態の作業機械とは、作業アタッチメントを有するものであれば、どのようなものであってもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
長尺平板パネル
1か月前
個人
インプラント杭
11日前
個人
透過型堰堤
1か月前
鹿島建設株式会社
鉄筋かご
1か月前
個人
津波防御三段壁浮上システム。
1か月前
株式会社竹中工務店
壁接合工法
18日前
中部電力株式会社
沈砂池
1か月前
住友建機株式会社
ショベル
17日前
株式会社大林組
人工地盤構造
4日前
株式会社エコ・プランナー
取水装置
17日前
コベルコ建機株式会社
操作装置
18日前
中部美化企業株式会社
水門装置
24日前
株式会社奥村組
建物の基礎構造
24日前
コベルコ建機株式会社
作業機械
1か月前
コベルコ建機株式会社
作業機械
1か月前
コベルコ建機株式会社
作業機械
1か月前
カナデビア株式会社
浮体構造体
1か月前
株式会社クボタ
作業機
4日前
株式会社クボタ
作業機
4日前
株式会社クボタ
作業機
4日前
株式会社クボタ
作業機
4日前
株式会社プラント・ツリース
杭基礎構造
10日前
住友重機械工業株式会社
作業機械
17日前
株式会社ダイトー
護岸コンクリートの補修構造
17日前
越後商事株式会社
ツース盤
13日前
鹿島建設株式会社
埋戻し方法
1か月前
東陽商事株式会社
スイベルの共回り防止装置
1か月前
鹿島建設株式会社
設備架台の施工方法
11日前
個人
狭小水域浚渫システムおよび方法
10日前
日鉄建材株式会社
鋼板製貯水構造物の止水構造
3日前
構法開発株式会社
埋込継手構造
1か月前
個人
大規模真空沸騰圧密工法と大深度気水分離タンク
17日前
プレス工業株式会社
建設機械のキャビン
1か月前
鹿島建設株式会社
杭施工方法
11日前
株式会社SEELS
フェンダー用カバー部材
1か月前
株式会社小松製作所
作業機械
19日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ