TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025070512
公報種別
公開特許公報(A)
公開日
2025-05-02
出願番号
2023180882
出願日
2023-10-20
発明の名称
作業支援システム及び作業機械
出願人
住友重機械工業株式会社
代理人
個人
,
個人
主分類
E02F
9/26 20060101AFI20250424BHJP(水工;基礎;土砂の移送)
要約
【課題】作業を煩雑にすることなく、飛行体を長時間継続して飛行させて作業機械を撮影する。
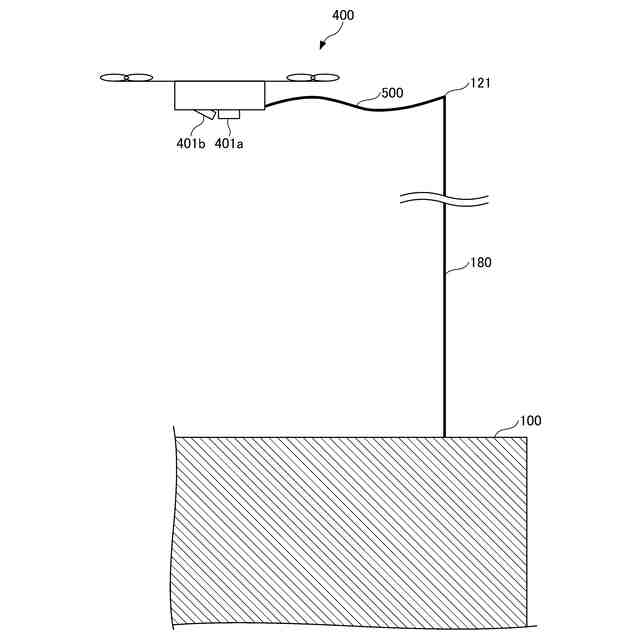
【解決手段】作業機械と、前記作業機械の上方を飛行する飛行体と、前記作業機械及び前記飛行体に接続され、前記作業機械から前記飛行体に電力を供給するための電源線を備えるケーブルと、を有し、前記飛行体は、前記作業機械の周辺を撮影する第1の撮影手段と、前記第1の撮影手段にて撮影された画像を送信する通信手段とを有する。
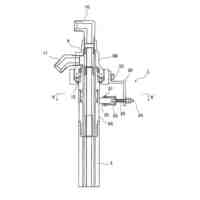
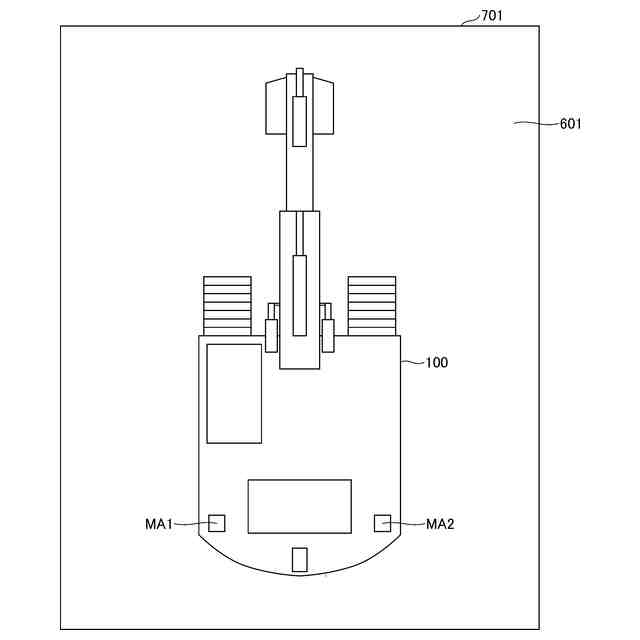
【選択図】図2
特許請求の範囲
【請求項1】
作業機械と、
前記作業機械の上方を飛行する飛行体と、
前記作業機械及び前記飛行体に接続され、前記作業機械から前記飛行体に電力を供給するための電源線を備えるケーブルと、を有し、
前記飛行体は、
前記作業機械の周辺を撮影する第1の撮影手段と、
前記第1の撮影手段にて撮影された画像を送信する通信手段と、を有する作業支援システム。
続きを表示(約 1,200 文字)
【請求項2】
前記飛行体は、
当該飛行体の飛行を制御する自律飛行制御手段と、
前記第1の撮影手段にて撮影された画像から、追従支援用物を検出する第1の検出手段と、を有し、
前記自律飛行制御手段は、前記第1の検出手段にて検出された追従支援用物に基づいて、当該飛行体が前記作業機械に対して所定の相対位置となるように当該飛行体の飛行を制御する、請求項1に記載の作業支援システム。
【請求項3】
前記作業機械は、旋回可能な旋回部を有し、
前記ケーブルは、前記旋回部に接続され、
前記追従支援用物は前記旋回部の少なくとも一部であり、または前記旋回部に備えられたものであり、
前記自律飛行制御手段は、前記第1の検出手段にて検出された追従支援用物に基づいて、前記旋回部の旋回に追従して当該飛行体を旋回させる、請求項2に記載の作業支援システム。
【請求項4】
前記作業機械は、前記飛行体が離着陸する飛行体ポートを有する、請求項2に記載の作業支援システム。
【請求項5】
前記ケーブルは、前記作業機械と前記飛行体との間の情報のやりとりを行うための信号線を備え、
前記自律飛行制御手段は、前記飛行体を前記飛行体ポートに着陸させる旨の命令を前記信号線を介して前記作業機械から受信した場合、前記飛行体を前記飛行体ポートに着陸させる、請求項4に記載の作業支援システム。
【請求項6】
前記飛行体は、
前記電源線を介した前記作業機械からの電力の供給が停止した場合に前記飛行体を飛行させるための電源を有し、
前記自律飛行制御手段は、前記電源線を介した前記作業機械からの電力の供給が停止した場合に前記飛行体を前記飛行体ポートに着陸させる、請求項4に記載の作業支援システム。
【請求項7】
前記ケーブルは、前記作業機械と前記飛行体との間の情報のやりとりを行うための信号線を備え、
前記作業機械は、前記飛行体が飛行中である旨を示す信号を前記信号線を介して受信している場合、その旨を示す情報を出力する出力手段を有する、請求項1に記載の作業支援システム。
【請求項8】
前記ケーブルは、前記作業機械の接続ポートに抜き差し可能に構成されている、請求項1に記載の作業支援システム。
【請求項9】
前記作業機械は、前記ケーブルを巻き取る巻き取り部を有し、該巻き取り部は、前記ケーブルを巻き取る方向に付勢されている、請求項1に記載の作業支援システム。
【請求項10】
前記第1の撮影手段にて撮影された画像から所定の物体を検出する第2の検出手段と、
前記第2の検出手段にて前記所定の物体が検出された場合に安全機能を作動させる安全制御手段と、を有する、請求項1に記載の作業支援システム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、作業支援システム及び作業機械に関する。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
作業機械の上空に飛行体を飛行させて作業機械を撮影する技術が、例えば特許文献1に開示されている。
【先行技術文献】
【特許文献】
【0003】
特許第7176874号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
飛行体は、搭載したバッテリーで飛行するが、バッテリーの容量が限られていることから、長時間継続して飛行することができない。特許文献1に開示された技術においては、発電装置を備える地上装置を作業機械の近傍に載置し、この地上装置と飛行体とを接続ケーブルを介して接続し、地上装置から飛行体に電力を供給している。
【0005】
しかしながら、特許文献1に開示された技術においては、飛行体に電力を供給するために地上装置を作業機械の近傍に載置しなければならない。そのため、作業機械が移動する度に、地上装置も移動させなければならず、作業が煩雑になってしまう。
【0006】
そこで、作業を煩雑にすることなく、飛行体を長時間継続して飛行させて作業機械を撮影することができる作業支援システム及び作業機械を提供することが望ましい。
【課題を解決するための手段】
【0007】
本開示の作業支援システムは、
作業機械と、
前記作業機械の上方を飛行する飛行体と、
前記作業機械及び前記飛行体に接続され、前記作業機械から前記飛行体に電力を供給するための電源線を備えるケーブルと、を有し、
前記飛行体は、
前記作業機械の周辺を撮影する第1の撮影手段と、
前記第1の撮影手段にて撮影された画像を送信する通信手段と、を有する。
【0008】
また、本開示の作業機械は、
上方を飛行する飛行体によって撮影される作業機械であって、
前記飛行体に電源線を介して接続され、前記電源線を介して前記飛行体に電力を供給する。
【発明の効果】
【0009】
本開示の作業支援システムによれば、作業を煩雑にすることなく、飛行体を長時間継続して飛行させて作業機械を撮影することができる。
【図面の簡単な説明】
【0010】
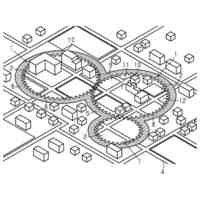
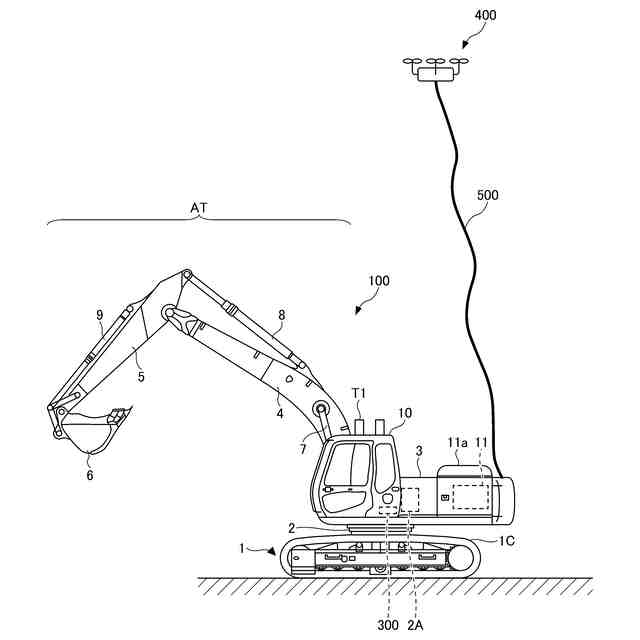
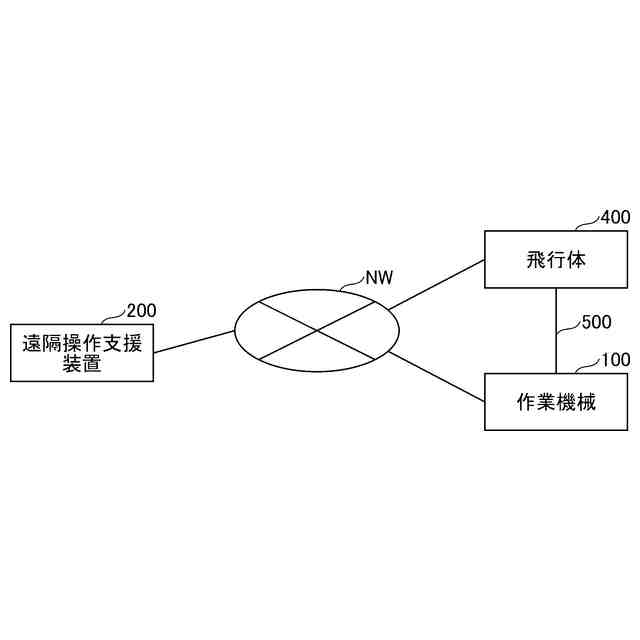
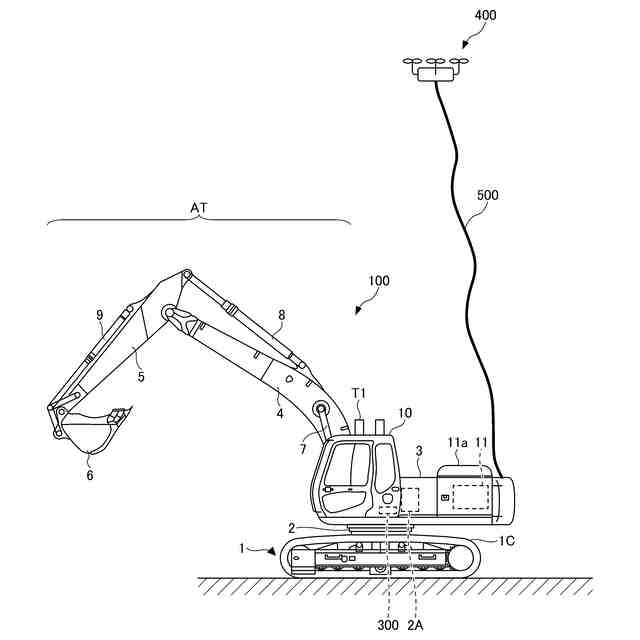
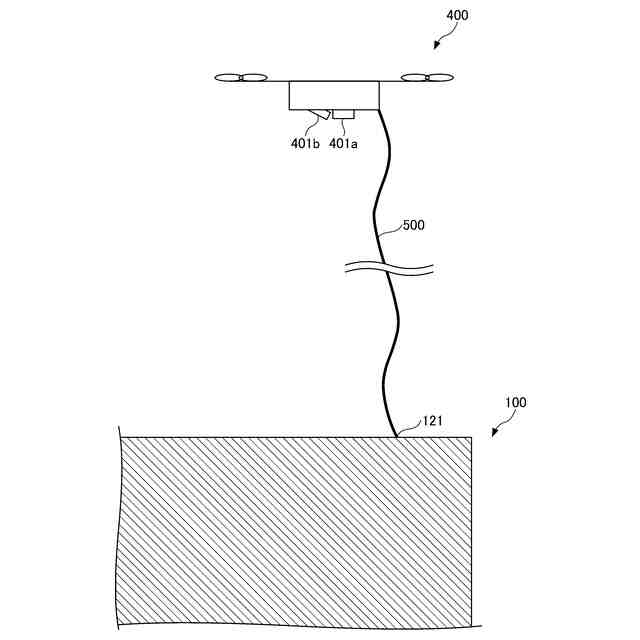
本開示の作業支援システムの一実施形態における全体構成を示す図である。
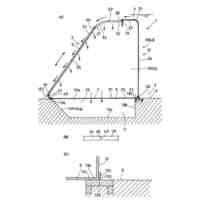
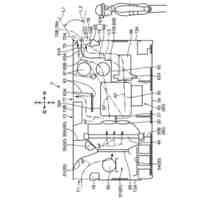
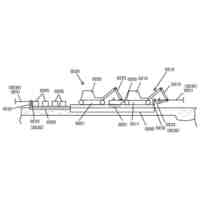
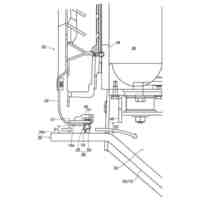
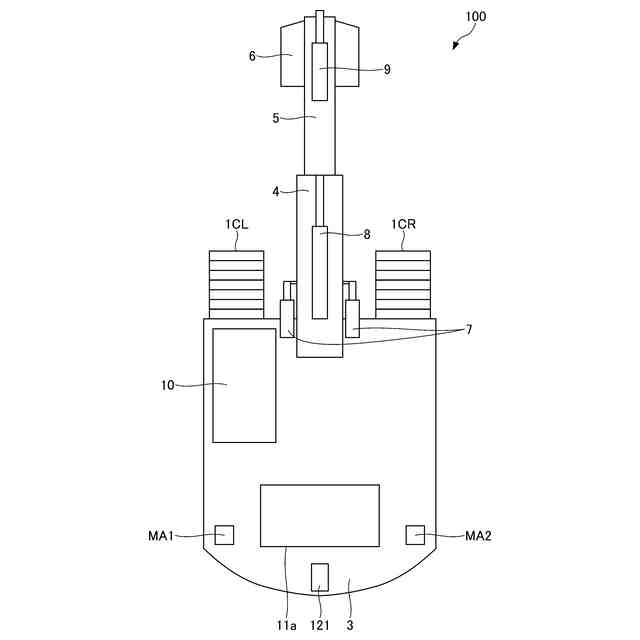
作業機械の一実施形態を示す側面図である。
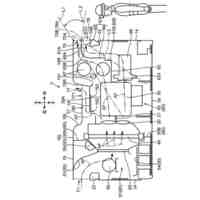
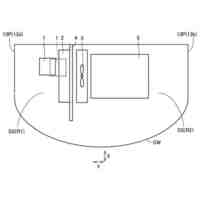
作業機械の一実施形態を示す上面図である。
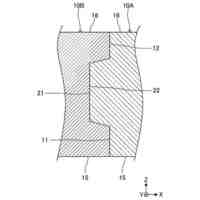
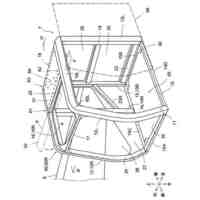
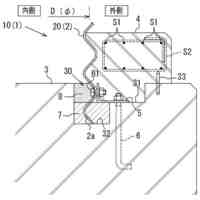
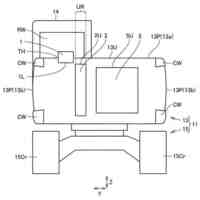
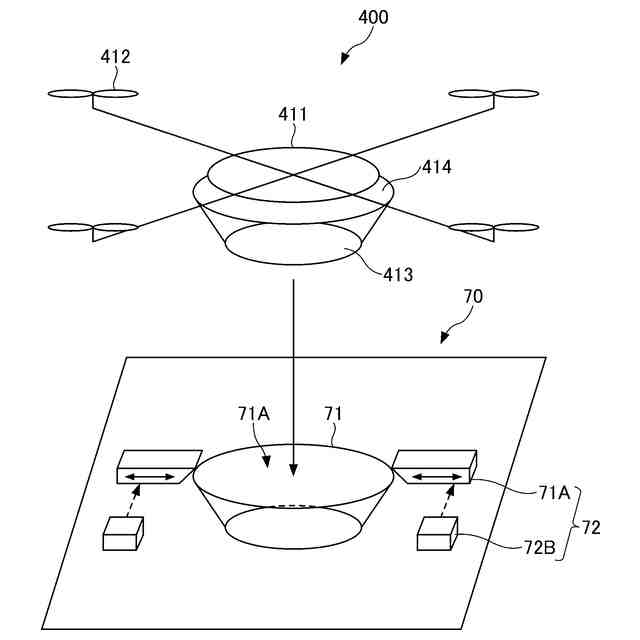
作業機械が有する飛行体ポートの一実施形態を説明するための図である。
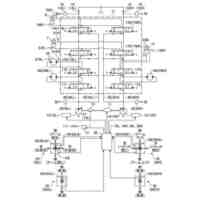
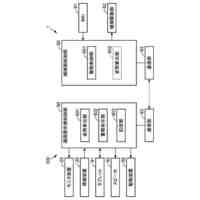
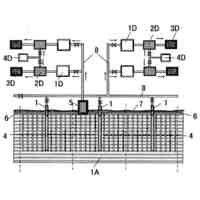
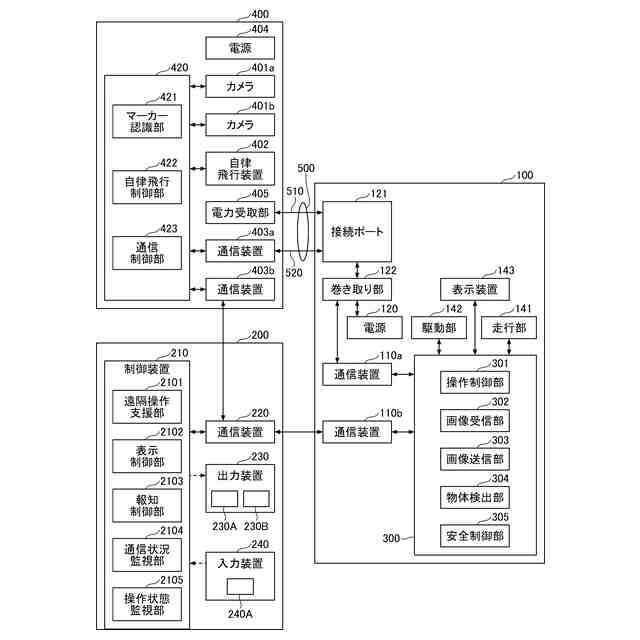
図1に示した作業機械、飛行体及び遠隔操作支援装置のそれぞれの構成及び機能の具体例を示すブロック図である。
飛行体のカメラにて作業機械の周辺を撮影する際の形態の一例を示す図である。
飛行体のカメラにて作業機械の周辺を撮影する際の形態の一例を示す図である。
飛行体のカメラにて作業機械の周辺を撮影する際の形態の一例を示す図である。
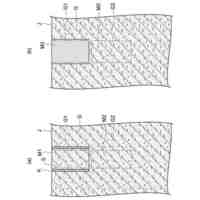
飛行体にて撮影されて遠隔操作支援装置に送信された画像の一例を示す図である。
飛行体の追従飛行を説明するための図である。
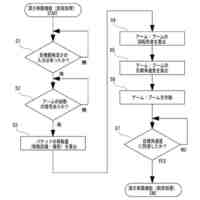
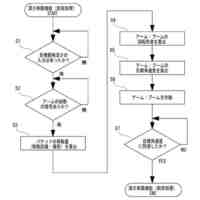
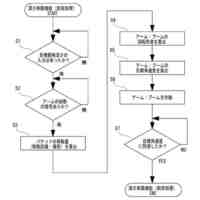
飛行体の作業機械への着陸動作の一例を説明するためのフローチャートである。
飛行体にて撮影されて遠隔操作支援装置に送信された画像の一例を示す図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
インプラント杭
11日前
個人
透過型堰堤
1か月前
鹿島建設株式会社
鉄筋かご
1か月前
個人
津波防御三段壁浮上システム。
1か月前
中部電力株式会社
沈砂池
1か月前
株式会社竹中工務店
壁接合工法
18日前
住友建機株式会社
ショベル
17日前
株式会社エコ・プランナー
取水装置
17日前
株式会社大林組
人工地盤構造
4日前
株式会社クボタ
作業機
4日前
コベルコ建機株式会社
作業機械
1か月前
コベルコ建機株式会社
作業機械
1か月前
コベルコ建機株式会社
作業機械
1か月前
カナデビア株式会社
浮体構造体
1か月前
株式会社クボタ
作業機
4日前
株式会社クボタ
作業機
4日前
株式会社クボタ
作業機
4日前
コベルコ建機株式会社
操作装置
18日前
中部美化企業株式会社
水門装置
24日前
株式会社奥村組
建物の基礎構造
24日前
株式会社ダイトー
護岸コンクリートの補修構造
17日前
住友重機械工業株式会社
作業機械
17日前
越後商事株式会社
ツース盤
13日前
株式会社プラント・ツリース
杭基礎構造
10日前
鹿島建設株式会社
埋戻し方法
1か月前
個人
狭小水域浚渫システムおよび方法
10日前
東陽商事株式会社
スイベルの共回り防止装置
1か月前
鹿島建設株式会社
設備架台の施工方法
11日前
プレス工業株式会社
建設機械のキャビン
1か月前
個人
大規模真空沸騰圧密工法と大深度気水分離タンク
17日前
日鉄建材株式会社
鋼板製貯水構造物の止水構造
3日前
鹿島建設株式会社
杭施工方法
11日前
株式会社小松製作所
作業機械
19日前
株式会社竹内製作所
土砂侵入防止構造
24日前
株式会社SEELS
フェンダー用カバー部材
1か月前
株式会社小松製作所
作業車両
19日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ