TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025074673
公報種別
公開特許公報(A)
公開日
2025-05-14
出願番号
2023185654
出願日
2023-10-30
発明の名称
作業機械目標動作設定システム
出願人
コベルコ建機株式会社
代理人
弁理士法人ATEN
主分類
E02F
3/43 20060101AFI20250507BHJP(水工;基礎;土砂の移送)
要約
【課題】作業機械が目標動作に従って動作する際の機械本体の浮き状態を抑制する。
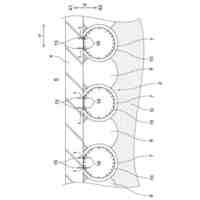
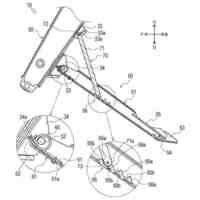
【解決手段】作業機械目標動作設定システム1は、機械本体10aと、傾斜検出装置21bと、アタッチメント15と、コントローラ30と、を備える。コントローラ30は、傾斜検出装置21bに検出された機械本体10aの傾斜に基づいて、機械本体10aが接地面に対して浮いた浮き状態であるか否かを判定する。コントローラ30は、コントローラ30に設定された目標動作変更条件が満たされた場合、目標動作変更処理を行う。目標動作変更処理は、機械本体10aの傾斜が小さくなる側に目標動作を変更する処理である。目標動作変更条件は、機械本体10aが浮き状態であることを含む。
【選択図】図1
特許請求の範囲
【請求項1】
機械本体と、
前記機械本体の傾斜を検出する傾斜検出装置と、
前記機械本体に取り付けられ、掘削作業を行うバケットを有するアタッチメントと、
前記バケットでの掘削動作の目標動作を設定するコントローラと、
を備え、
前記コントローラは、
前記傾斜検出装置に検出された前記機械本体の傾斜に基づいて、前記機械本体が接地面に対して浮いた浮き状態であるか否かを判定し、
前記コントローラに設定された目標動作変更条件が満たされた場合、前記機械本体の傾斜が小さくなる側に前記目標動作を変更する処理である目標動作変更処理を行い、
前記目標動作変更条件は、前記機械本体が浮き状態であることを含む、
作業機械目標動作設定システム。
続きを表示(約 1,900 文字)
【請求項2】
請求項1に記載の作業機械目標動作設定システムであって、
前記目標動作変更処理は、
前記掘削動作の開始位置での地面に対する前記バケットの角度である掘削開始目標バケット対地角度と、
前記掘削動作での前記バケットの目標経路と、
の一方または両方の変更である、
作業機械目標動作設定システム。
【請求項3】
請求項2に記載の作業機械目標動作設定システムであって、
前記目標動作変更条件は、前記機械本体の前側部分が接地面に対して浮いた前浮き状態であることを含む前浮き状態対処条件を含み、
前記コントローラは、前記前浮き状態対処条件が満たされた場合、前記目標動作変更処理において、
前記掘削開始目標バケット対地角度と、
前記掘削動作での前記バケットの目標掘削深さと、
の一方または両方を変更する、
作業機械目標動作設定システム。
【請求項4】
請求項2に記載の作業機械目標動作設定システムであって、
前記目標動作変更条件は、前記機械本体の後側部分が接地面に対して浮いた後浮き状態であることを含む後浮き状態対処条件を含み、
前記コントローラは、前記後浮き状態対処条件が満たされた場合、前記目標動作変更処理において、
前記掘削動作での前記バケットの水平方向における掘削距離である目標水平掘削距離と、
前記掘削動作での前記バケットの目標掘削深さと、
前記掘削動作が終了する位置である目標掘削終了位置と、
のうち1つ以上を変更する、
作業機械目標動作設定システム。
【請求項5】
請求項2に記載の作業機械目標動作設定システムであって、
前記コントローラは、
前記機械本体が前記浮き状態になった時の、高さ方向における前記バケットの位置である浮き状態バケット高さを記憶し、
前記浮き状態バケット高さに基づいて設定される閾値である高さ閾値よりも上の位置で前記バケットが前記掘削動作を行うときの、前記目標動作変更処理での前記目標動作の変更を制限する、
作業機械目標動作設定システム。
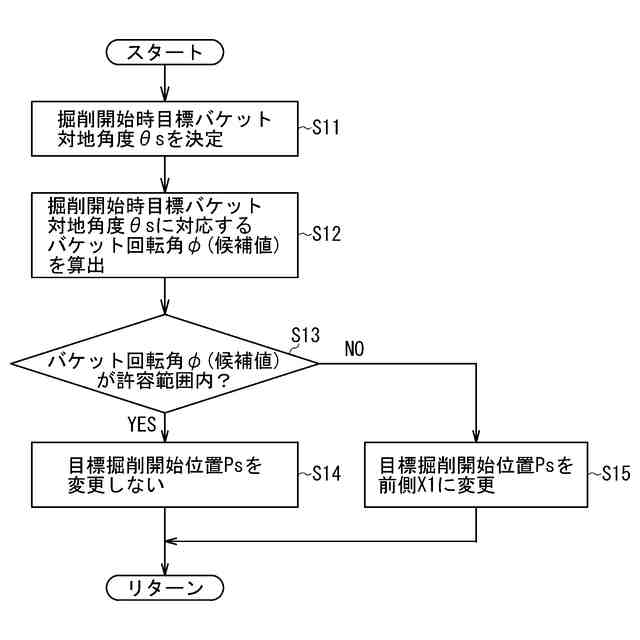
【請求項6】
請求項2に記載の作業機械目標動作設定システムであって、
前記アタッチメントは、前記バケットが回転可能に取り付けられるアームを備え、
前記コントローラには、前記アームに対する前記バケットの角度の許容範囲であるバケット回転角許容範囲が設定され、
前記コントローラは、
前記目標動作変更処理を行う場合に、変更後の前記掘削開始目標バケット対地角度を決定し、
決定した前記掘削開始目標バケット対地角度で前記バケットを配置するための、前記アームに対する前記バケットの角度が、前記バケット回転角許容範囲の範囲外である場合、前記掘削動作が開始される位置である目標掘削開始位置を変更する、
作業機械目標動作設定システム。
【請求項7】
請求項2に記載の作業機械目標動作設定システムであって、
前記コントローラは、前記目標動作変更処理において、前記傾斜検出装置に検出された前記機械本体の傾斜に応じて、前記目標動作の変更量を変える、
作業機械目標動作設定システム。
【請求項8】
請求項2に記載の作業機械目標動作設定システムであって、
前記コントローラは、変更後の前記目標動作で前記バケットに前記掘削動作を行わせたときに前記目標動作変更条件が満たされた場合、前記目標動作変更処理において、前記機械本体の傾斜が小さくなる側に前記目標動作をさらに変更する、
作業機械目標動作設定システム。
【請求項9】
請求項8に記載の作業機械目標動作設定システムであって、
前記コントローラは、前記目標動作変更処理において、前記目標動作の変更量を積算した積算変更量が、前記コントローラに設定された積算変更量制限値以下となるように、前記目標動作の変更を制限する、
作業機械目標動作設定システム。
【請求項10】
請求項1に記載の作業機械目標動作設定システムであって、
前記コントローラは、前記バケットが今回の前記掘削動作を行っている最中に、前記目標動作変更条件が満たされた場合、前記目標動作変更処理において次回以降の前記掘削動作の前記目標動作を変更する、
作業機械目標動作設定システム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、作業機械の目標動作を設定する作業機械目標動作設定システムに関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
例えば特許文献1に、土質と地形情報とに基づいてバケットの掘削計画(目標動作)を作成する技術が記載されている。
【先行技術文献】
【特許文献】
【0003】
特開2021-188362号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
作業機械が目標動作に従って作業を行ったときに、機械本体の接地面から機械本体の底面が浮いた浮き状態になる場合がある。この浮き状態を抑制できることが望まれている。
【0005】
そこで、本発明は、作業機械が目標動作に従って動作する際の機械本体の浮き状態を抑制することができる、作業機械目標動作設定システムを提供することを目的とする。
【課題を解決するための手段】
【0006】
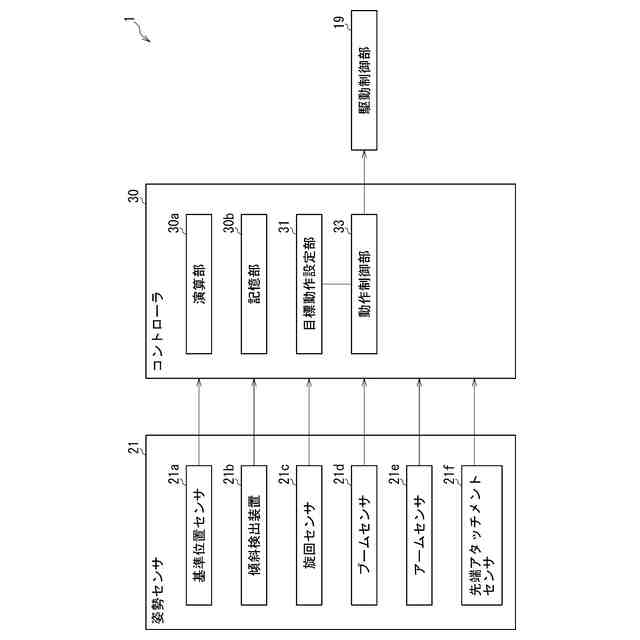
作業機械目標動作設定システムは、機械本体と、傾斜検出装置と、アタッチメントと、コントローラと、を備える。前記傾斜検出装置は、前記機械本体の傾斜を検出する。前記アタッチメントは、前記機械本体に取り付けられる。前記アタッチメントは、掘削作業を行うバケットを有する。前記コントローラは、前記バケットでの掘削動作の目標動作を設定する。前記コントローラは、前記傾斜検出装置に検出された前記機械本体の傾斜に基づいて、前記機械本体が接地面に対して浮いた浮き状態であるか否かを判定する。前記コントローラは、前記コントローラに設定された目標動作変更条件が満たされた場合、目標動作変更処理を行う。前記目標動作変更処理は、前記機械本体の傾斜が小さくなる側に前記目標動作を変更する処理である。前記目標動作変更条件は、前記機械本体が浮き状態であることを含む。
【発明の効果】
【0007】
上記の作業機械目標動作設定システムにより、作業機械が目標動作に従って動作する際の機械本体の浮き状態を抑制することができる。
【図面の簡単な説明】
【0008】
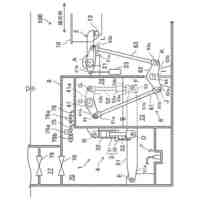
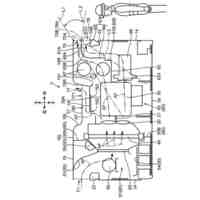
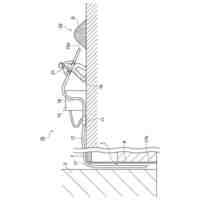
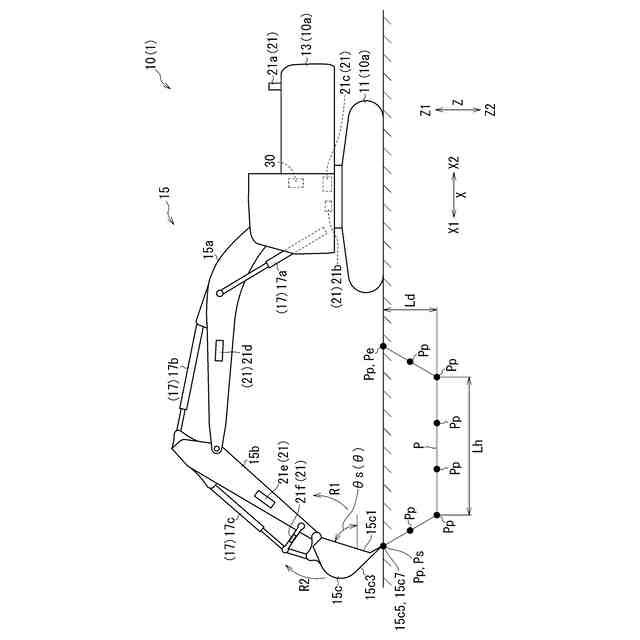
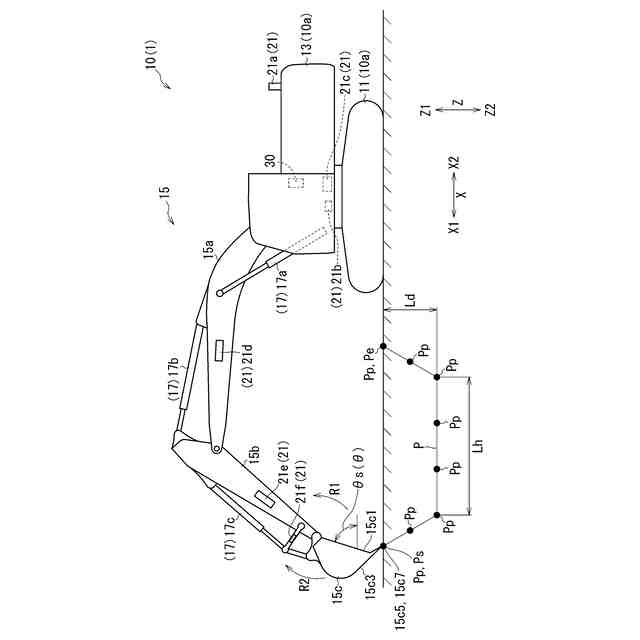
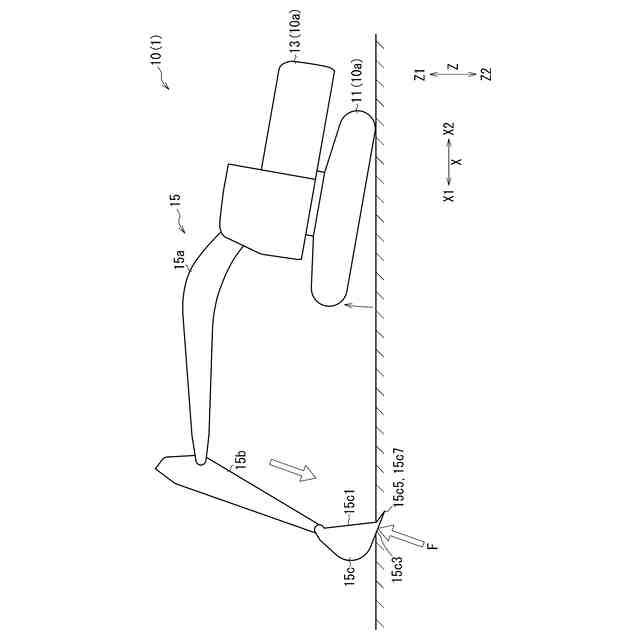
作業機械目標動作設定システム1の作業機械10を横から見た図である。
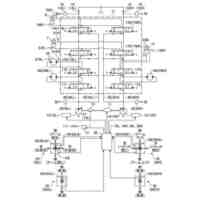
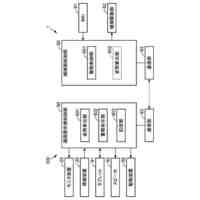
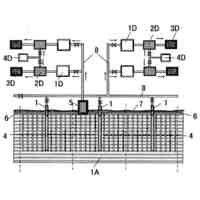
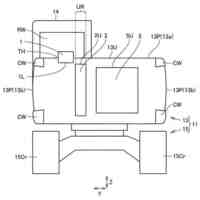
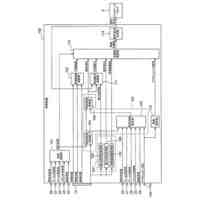
作業機械目標動作設定システム1のブロック図である。
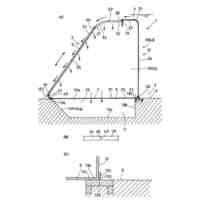
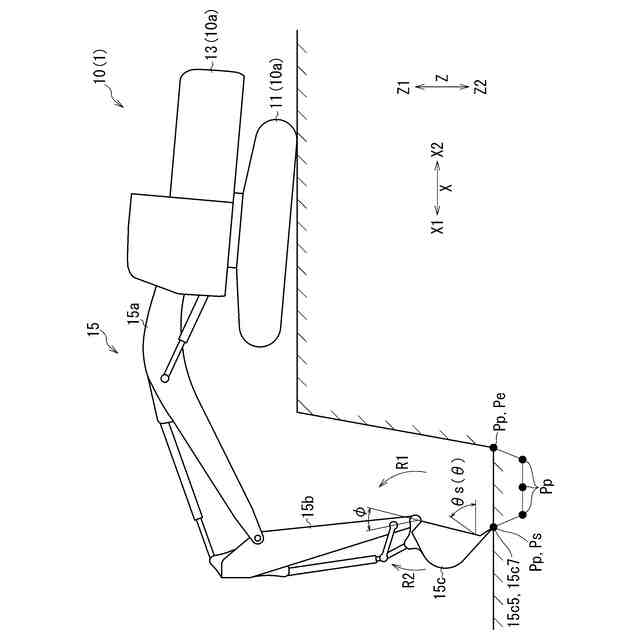
図1に示す機械本体10aが前浮き状態のときの作業機械10を横から見た図である。
図3に示す機械本体10aが前浮き状態になったことで変更された目標経路Pなどを横から見た図である。
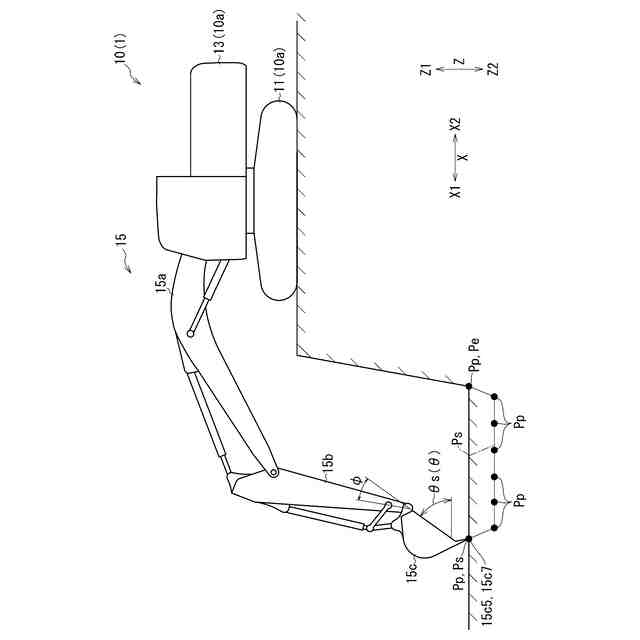
図1に示す機械本体10aが後浮き状態のときの作業機械10を横から見た図である。
図5に示す機械本体10aが後浮き状態になったことで変更された目標経路Pなどを横から見た図である。
図1に示す機械本体10aが前浮き状態であり、掘削開始目標バケット対地角度θsでバケット15cを配置できないときの作業機械10を横から見た図である。
図7に示す目標掘削開始位置Psが、図7に示す位置よりも前側X1に変更された目標経路Pなどを横から見た図である。
図7および図8に示す掘削開始目標バケット対地角度θsおよび目標掘削開始位置Psに関する処理のフローチャートである。
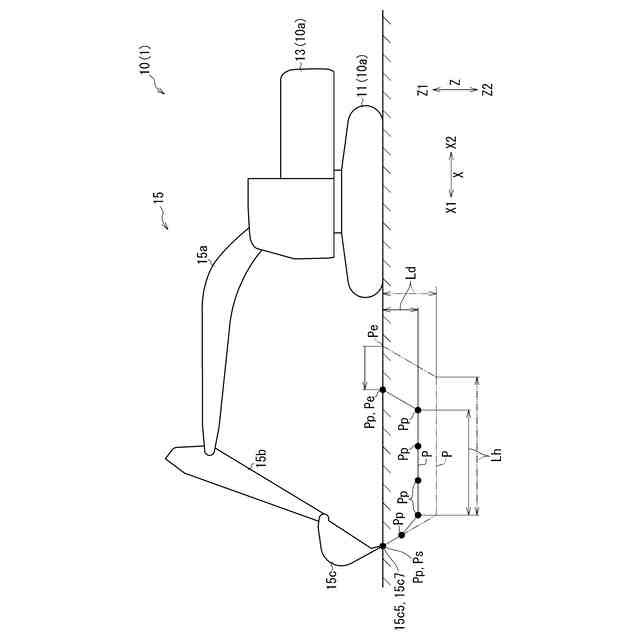
図1に示す機械本体10aが後浮き状態となったときに記憶されるバケット高さH15cなどを示す図である。
図1に示す機械本体10aの傾斜と、図2に示すコントローラ30による目標動作の変更量と、の関係を示すグラフである。
図1に示す作業機械10の作業時間と、図2に示すコントローラ30による目標動作の積算変更量と、の関係を示すグラフである。
図11に示す積算変更量制限値による積算変更量の制限の処理のフローチャートである。
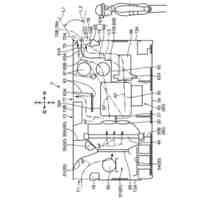
図1に示す機械本体10aが浮き状態になったときにアタッチメント15の動作方向の変更が行われた場合の作業機械10を横から見た図である。
図1に示すアタッチメント15の、動作させる要素の変更が行われた場合の、作業機械10を横から見た図である。
図1に示すバケット15cの動作が排出動作に変更された場合の作業機械10を横から見た図である。
図2に示すコントローラ30の処理のフローチャートである。
図17に示す「今回の掘削動作での前浮き状態の対処」の処理(S50)を示すフローチャートである。
図17に示す「今回の掘削動作での後浮き状態の対処」の処理(S70)を示すフローチャートである。
【発明を実施するための形態】
【0009】
図1~図19を参照して、作業機械目標動作設定システム1について説明する。
【0010】
作業機械目標動作設定システム1は、図1に示すように、作業機械10の目標動作を設定するシステムである。作業機械目標動作設定システム1は、作業機械10と、コントローラ30と、を備える。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
長尺平板パネル
28日前
個人
透過型堰堤
15日前
個人
構造物の検査方法
29日前
株式会社東部
多翼型鋼管杭
1か月前
鹿島建設株式会社
鉄筋かご
13日前
個人
津波防御三段壁浮上システム。
21日前
中部電力株式会社
沈砂池
13日前
カナデビア株式会社
起伏ゲート
29日前
株式会社竹中工務店
壁接合工法
1日前
住友建機株式会社
ショベル
今日
日本車輌製造株式会社
杭打機
1か月前
株式会社エコ・プランナー
取水装置
今日
コベルコ建機株式会社
作業機械
13日前
コベルコ建機株式会社
操作装置
1日前
コベルコ建機株式会社
作業機械
13日前
カナデビア株式会社
浮体構造体
21日前
コベルコ建機株式会社
作業機械
13日前
中部美化企業株式会社
水門装置
7日前
株式会社奥村組
建物の基礎構造
7日前
住友重機械工業株式会社
作業機械
今日
株式会社ダイトー
護岸コンクリートの補修構造
今日
鹿島建設株式会社
埋戻し方法
21日前
東陽商事株式会社
スイベルの共回り防止装置
15日前
個人
大規模真空沸騰圧密工法と大深度気水分離タンク
今日
プレス工業株式会社
建設機械のキャビン
13日前
カナデビア株式会社
係留装置及びその制御方法
29日前
構法開発株式会社
埋込継手構造
28日前
株式会社小松製作所
作業機械
2日前
株式会社竹内製作所
土砂侵入防止構造
7日前
株式会社SEELS
フェンダー用カバー部材
22日前
株式会社クボタ
フロントローダ及び作業車両
28日前
株式会社小松製作所
作業車両
2日前
コベルコ建機株式会社
作業機械
17日前
マックストン株式会社
シート敷設用アンカーブロック
14日前
キヤノン株式会社
移動体および撮像装置
2日前
日立建機株式会社
作業機械
1か月前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ