TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025075462
公報種別
公開特許公報(A)
公開日
2025-05-15
出願番号
2023186643
出願日
2023-10-31
発明の名称
自律走行型の掃除ロボット
出願人
三星電子株式会社
,
Samsung Electronics Co.,Ltd.
代理人
弁理士法人前田特許事務所
主分類
A47L
9/28 20060101AFI20250508BHJP(家具;家庭用品または家庭用設備;コーヒーひき;香辛料ひき;真空掃除機一般)
要約
【課題】液体に接触しなくても、床面の液体の有無を高い精度で検知して回避できるようにする。
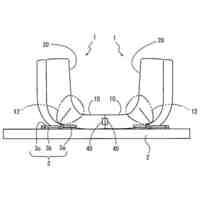
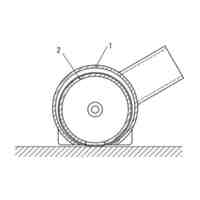
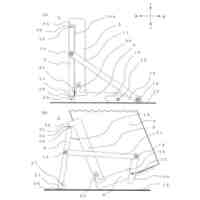
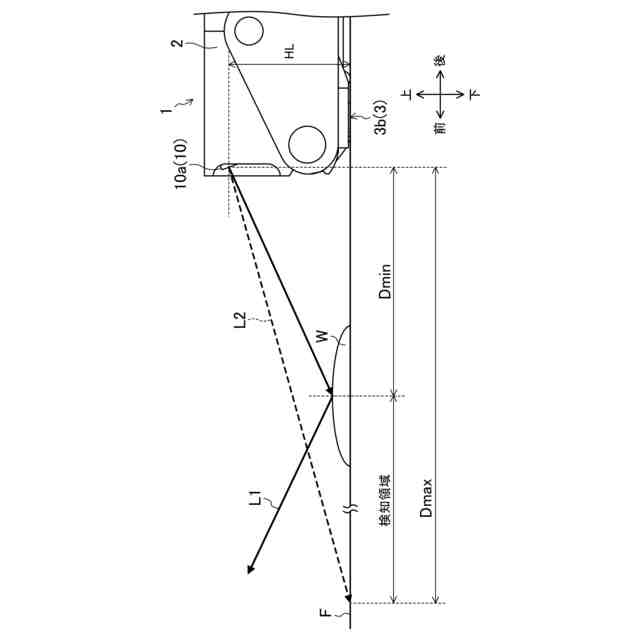
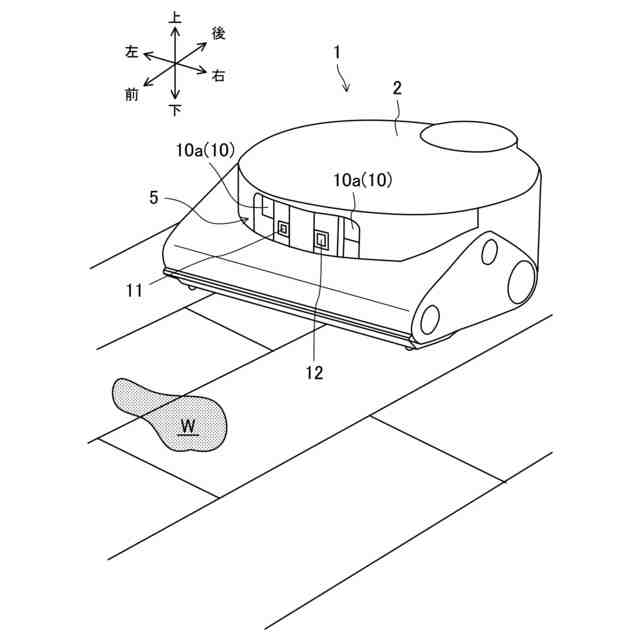
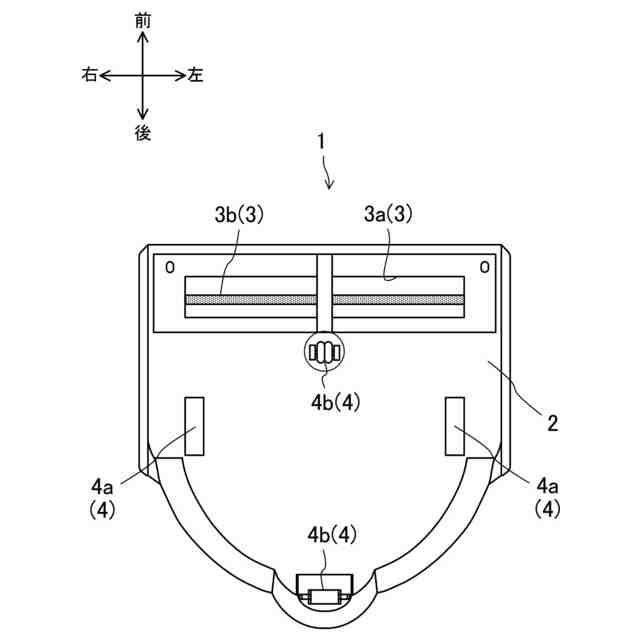
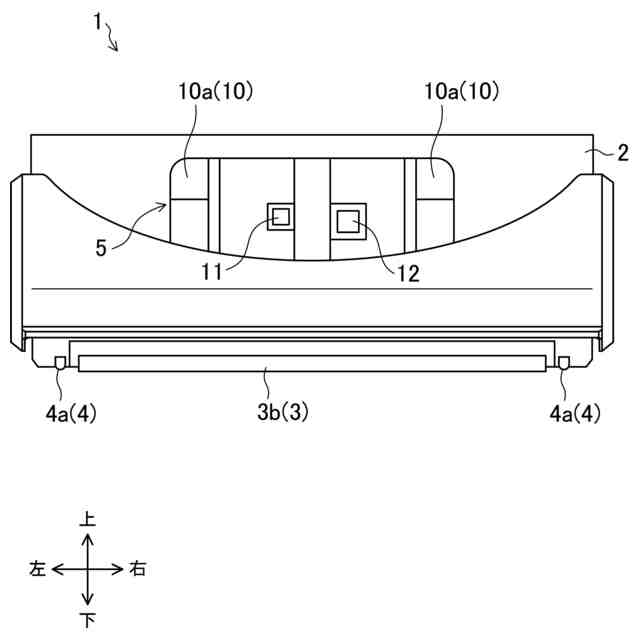
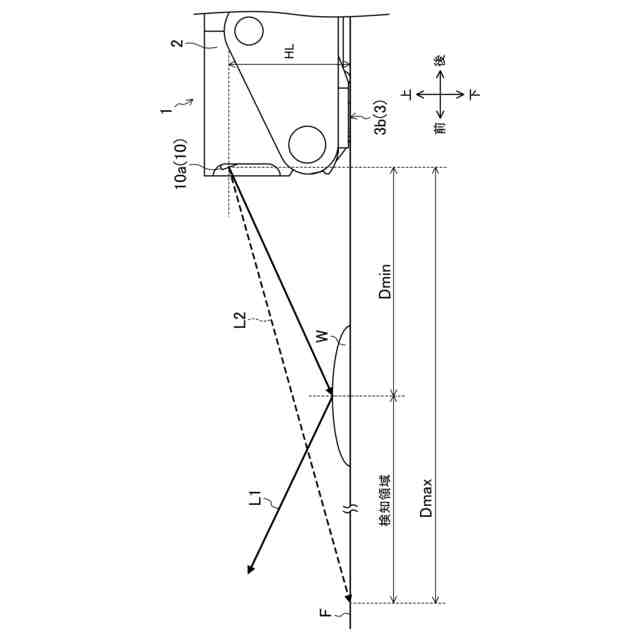
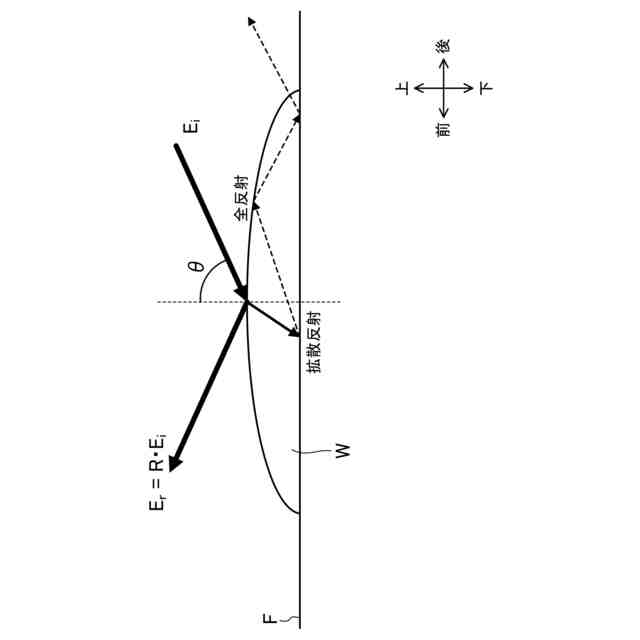
【解決手段】自律走行型の掃除ロボット1である。床面の上を走行するロボット本体2の進路前方の床面を撮像し、光源10aが照射する可視域外の光を含む特定波長光を検出する特定波長光撮像センサ12、特定波長光撮像センサ12が出力する特定波長光信号に基づいてロボット本体2の進路前方の床面に存在する液体Wの有無を判断し、それによって掃除ロボット1の運転を変更する制御部20などを備える。光源10aは、特定波長光撮像センサ12の検知領域における最短検知距離の床面の液体表面での反射量が少なくとも3%以上となる高さ位置に設けられている。
【選択図】図4
特許請求の範囲
【請求項1】
自律走行型の掃除ロボットであって、
床面の上を走行するロボット本体と、
前記ロボット本体の下面に設けられて前記床面を掃除する掃除部と、
前記ロボット本体の進路前方に向けて、可視域外の光を含む特定波長光を照射する光源を有する光照射部と、
前記ロボット本体の進路前方の前記床面を含む所定の検知領域を撮像し、前記光照射部が照射する特定波長光を検出する特定波長光撮像センサと、
前記特定波長光撮像センサが出力する特定波長光信号を受信し、前記ロボット本体の進路前方の前記床面に存在する液体の有無を前記特定波長光信号に基づいて判断し、それによって前記掃除ロボットの運転を変更する制御部とを備え、
前記光源は、前記特定波長光撮像センサの前記検知領域における最短検知距離の前記床面に所定の液体が存在する場合における当該液体表面での照射光の反射量が少なくとも3%以上となる高さ位置に設けられている、ことを特徴とする掃除ロボット。
続きを表示(約 1,000 文字)
【請求項2】
請求項1に記載の掃除ロボットにおいて、
可視光を検出して前記ロボット本体の進路前方の前記床面を含む領域を撮像するカメラからなる可視光撮像センサを更に備え、
前記制御部が、前記可視光撮像センサが出力する可視光信号を受信し、前記特定波長光信号と前記可視光信号とに基づいて前記液体の有無を判断する掃除ロボット。
【請求項3】
請求項1に記載の掃除ロボットにおいて、
前記制御部が、前記液体の有無を判断するために予め設定された学習済み機械学習モデルを有し、前記特定波長光信号を前記学習済み機械学習モデルに適用することによって前記液体の有無を判断する掃除ロボット。
【請求項4】
請求項2に記載の掃除ロボットにおいて、
前記制御部が、前記液体の有無を判断するために予め設定された学習済み機械学習モデルを有し、前記特定波長光信号および前記可視光信号を前記学習済み機械学習モデルに適用することによって前記液体の有無を判断する掃除ロボット。
【請求項5】
請求項4に記載の掃除ロボットにおいて、
前記制御部が、前記特定波長光信号を処理して得られる特定波長光画像と前記可視光信号を処理して得られる可視光画像とを合成して合成画像を作成し、当該合成画像を前記学習済み機械学習モデルに適用することによって前記液体の有無を判断する掃除ロボット。
【請求項6】
請求項4に記載の掃除ロボットにおいて、
前記制御部が、前記特定波長光信号を処理して得られる特定波長光画像を第1の前記学習済み機械学習モデルに適用することによって前記液体の有無を判断する第1判断処理と、前記可視光信号を処理して得られる可視光画像を第2の前記学習済み機械学習モデルに適用することによって前記液体の有無を判断する第2判断処理と、を実行し、
前記第1判断処理と前記第2判断処理の双方に基づいて前記液体の有無を総合的に判断する掃除ロボット。
【請求項7】
請求項2に記載の掃除ロボットにおいて、
前記制御部が、前記特定波長光信号を処理して得られる特定波長光画像と前記可視光信号を処理して得られる可視光画像との差分を用いて前記液体の有無を判断する掃除ロボット。
【請求項8】
請求項1から請求項7のいずれか1項に記載の掃除ロボットにおいて、
前記特定波長光は、赤外光である掃除ロボット。
発明の詳細な説明
【技術分野】
【0001】
開示する技術は、一般家庭向けの自律走行型の掃除ロボットに関し、特に濡れた場所を検知する技術に関する。
続きを表示(約 1,100 文字)
【背景技術】
【0002】
近年、障害物を回避しながら走行し、床面を自動的に掃除するロボット(自律走行型の掃除ロボット、以下単に「掃除ロボット」ともいう)が注目されている。掃除ロボットは、ブラシで塵埃を巻き上げ、吸引して掃除するタイプが一般的であるが、モップなどで汚れを拭き取って掃除するタイプやこれらを併用したタイプも実用化されている。
【0003】
コンピュータ技術の進歩により、掃除ロボットは、家具、家電製品、インテリアなどの室内に常備されている障害物については、比較的高い精度で検知でき、これらを回避して床面を走行できるようになってきている。
【0004】
しかし、ペットの尿や零れ落ちた飲料などにより、床面の一部が濡れている場合があり得る。
【0005】
濡れた場所を掃除ロボットが掃除すると、掃除ロボットが液体を吸い込んで故障するおそれがある。また、濡れた場所を通過して掃除ロボットが走行を続けると、その液体による汚れを拡散するおそれもある。従って、掃除ロボットは、走行経路に存在する濡れ場所を事前に検知して、回避する必要がある。
【0006】
濡れ場所を検知する従来技術は、例えば特許文献1に開示されている。具体的には、その実施の形態2に、電極間に所定の電圧を印加した一対の電極で液体の有無を検知する技術が開示されている。電極が液体に触れると電極間の抵抗値が変化する。その抵抗値を所定の閾値と比較し、液体の有無を検知する。
【0007】
なお、特許文献1の実施の形態1にカメラで撮影した画像から液体を検知することが記載されているが、その具体的な内容は開示されていない。
【0008】
特許文献2には、尿を含むペットの排泄物を検知する技術が開示されている。具体的には、赤外線カメラによって進路前方の熱画像を撮像し、その熱画像で所定以上の温度差がある領域が認められた場合、その領域に排泄物が有ると検知する。
【先行技術文献】
【特許文献】
【0009】
特開2022-025678号公報
特表2018-515191号公報
【発明の概要】
【発明が解決しようとする課題】
【0010】
特許文献1の技術は、液体に電極を接触させる必要がある。従って、掃除ロボットが濡れた場所に到達しなければ検知できない。そのため、掃除ロボットが液体を検知して停止や方向転換しても、掃除ロボットが濡れた場所を回避できないおそれがある。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
掃除機
3か月前
個人
自助箸
2か月前
個人
掃除道具
3か月前
個人
枕
10日前
個人
耳拭き棒
6か月前
個人
体洗い具
5か月前
個人
ハンガー
2か月前
個人
枕
3か月前
個人
屋外用箒
2か月前
個人
組立式棚板
2か月前
個人
省煙消臭器
3か月前
個人
片手代替具
6か月前
個人
開閉トング
1か月前
個人
掃除シート
4か月前
個人
エコ掃除機
7か月前
個人
洗面台
5か月前
個人
中身のない枕
2か月前
個人
シャワー装置
1か月前
個人
転倒防止装置
3日前
個人
ゴミ袋保持枠
2か月前
個人
受け皿
22日前
個人
汚水漏れ防止具
5か月前
個人
ホバー掃除機。
1か月前
個人
汚水汚れ防止具
5か月前
個人
コーナーシール
4か月前
個人
補助寝具
3か月前
個人
食事用具
7か月前
個人
組立家具
4か月前
個人
ライト付きトング
2日前
個人
立体型洗顔シート
2か月前
個人
体操用椅子
2か月前
個人
自在すきま掃除棒
2か月前
個人
三本で一善の箸具
4か月前
個人
スライド式まな板
2か月前
個人
米櫃
24日前
個人
飲料用カップ
2か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ