TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025073146
公報種別
公開特許公報(A)
公開日
2025-05-13
出願番号
2023183661
出願日
2023-10-26
発明の名称
リンク機構制御装置
出願人
株式会社国際電気通信基礎技術研究所
代理人
個人
,
個人
主分類
B25J
19/00 20060101AFI20250502BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】リンク機構が有するリンクに制御信号を送信する際に、その制御信号の電波の指向性を適切に制御できるようにする。
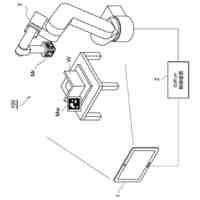
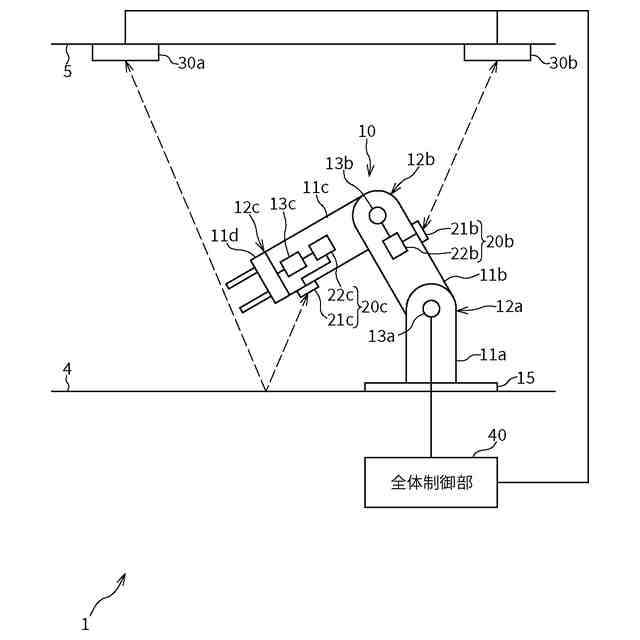
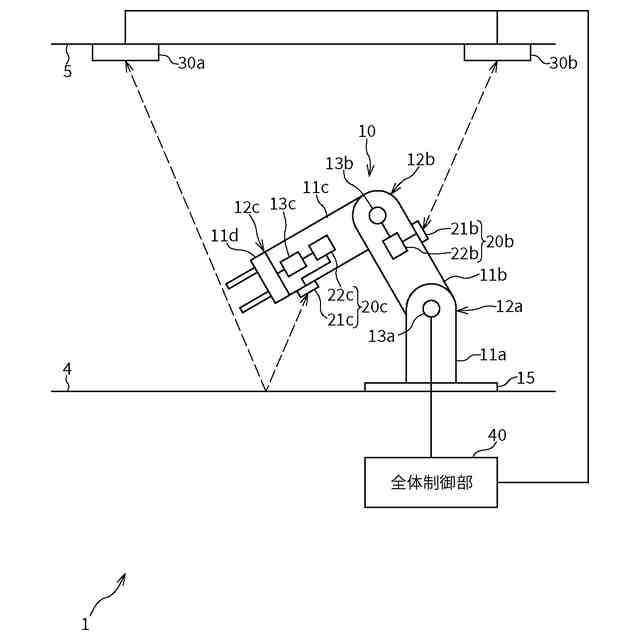
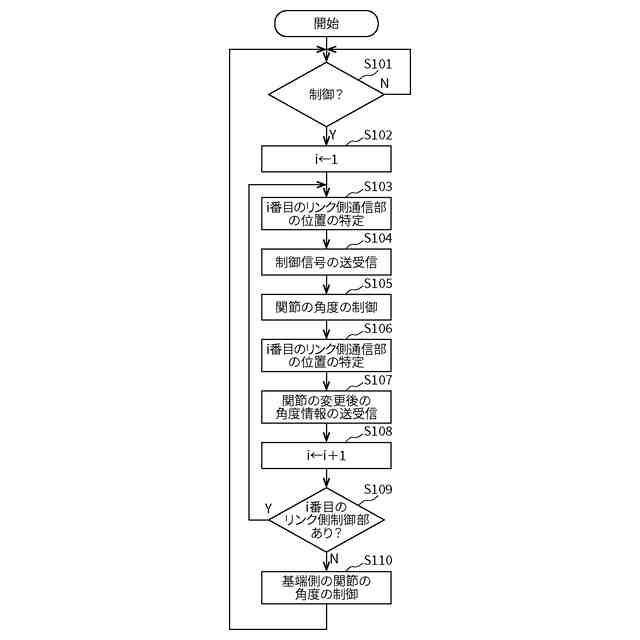
【解決手段】リンク機構制御装置1は、関節で連結された複数のリンク11を有するリンク機構10と、リンク11に設けられたリンク側通信部21、及び制御信号に応じて関節の角度を変更させると共に、関節の変更後の角度情報を送信する関節制御部22を有するリンク側制御部20と、基地側通信部30と、基地側通信部30を介して、リンク側制御部20に関節の角度の変更を指示する制御信号を送信すると共に、関節の変更後の角度情報を受信する全体制御部40とを備え、全体制御部40は、制御信号を送信する場合に、リンク側制御部20から受信した関節の変更後の角度情報を用いて特定したリンク側通信部21の位置に電波が送信されるように、基地側通信部30の指向性を制御する。
【選択図】図1
特許請求の範囲
【請求項1】
駆動手段によって駆動される関節によって連結された複数のリンクを有するリンク機構と、
前記複数のリンクのうち1以上のリンクにそれぞれ設けられた、電波を送受信するためのリンク側通信部、及び当該リンク側通信部を介して受信した制御信号に応じて関節の角度を変更させると共に、当該リンク側通信部を介して関節の変更後の角度情報を送信する関節制御部を有する1以上のリンク側制御部と、
前記1以上のリンク側通信部と電波を送受信するための1以上の基地側通信部と、
前記1以上の基地側通信部を介して、前記1以上のリンク側制御部のそれぞれに関節の角度の変更を指示する制御信号を送信すると共に、前記リンク機構の関節の変更後の角度情報を受信する全体制御部と、を備え、
前記全体制御部は、制御信号を送信する場合に、前記リンク側制御部から受信した関節の変更後の角度情報を用いて特定した前記リンク側通信部の位置に電波が送信されるように、前記基地側通信部の指向性を制御する、リンク機構制御装置。
続きを表示(約 570 文字)
【請求項2】
前記関節制御部は、前記全体制御部から受信した制御信号に応じて変更させた関節の角度が、当該制御信号によって指示された角度と異なる場合にのみ、当該関節の変更後の角度情報を、前記リンク側通信部を介して前記全体制御部に送信する、請求項1記載のリンク機構制御装置。
【請求項3】
前記全体制御部は、前記基地側通信部と、制御信号の送信先である前記リンク側通信部とが見通しで通信できない場合に、当該基地側通信部から放射された電波の反射波が当該リンク側通信部で受信されるように前記基地側通信部の指向性を制御する、請求項1記載のリンク機構制御装置。
【請求項4】
前記全体制御部は、ある前記関節制御部に制御信号を送信する場合に、当該関節制御部が角度を変更させる関節以外の関節の現在の角度情報を含む制御信号を送信し、
前記リンク側制御部の関節制御部は、前記全体制御部から送信された制御信号に基づいて角度を変更させた関節の変更後の角度情報を送信する場合に、当該制御信号に含まれる各関節の現在の角度情報を用いて特定した当該リンク側制御部のリンク側通信部の位置から前記基地側通信部の位置に電波が送信されるように、当該リンク側通信部の指向性を制御する、請求項1から請求項3のいずれか記載のリンク機構制御装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、リンク機構を制御するリンク機構制御装置に関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
従来、ロボットアームなどの複数のリンクが関節によって連結されたリンク機構において、制御用の配線を低減させるため、制御信号を無線で送受信することによって、リンク機構の関節を駆動させることが行われている(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
特開2021-151675号公報
特開2022-055683号公報
特開2016-046657号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
リンク機構が有するリンクに制御信号を無線で送信する際に、ミリ波などの波長の短い電波を用いる場合には、利得を確保するため、指向性ビームを形成することが考えられる。しかしながら、外力や他の要因によって、制御信号によって指示されたように関節の角度が変更されなかった場合には、制御信号を送信する側の認識しているリンク側の通信部の位置と、リンク側の通信部の実際の位置とに差が生じることになり、それ以降の制御信号の適切な送受信を実現できないことになる。ここで、制御信号によって指示されたように関節の角度が変更されない要因は特に限定されないが、例えば、次のような要因を挙げることができる。
【0005】
(1)許容トルクを上回るトルクが必要になった場合。一例として、想定以上に重い搬送対象物をリンク機構によって搬送する場合に、許容トルクを上回るトルクが必要となった関節において、目的とする角度に変更できないことがある。この場合には、制御信号によって指示された角度と、関節の変更後の実際の角度とに差が生じることになる。
【0006】
(2)動作に必要である電力が十分に供給されなかった場合。一例として、ある関節を駆動するモータに十分な電力が供給されず、その結果として、その関節を目的とする角度に変更できないことがある。この場合にも、制御信号によって指示された角度と、関節の変更後の実際の角度とに差が生じることになる。
【0007】
(3)関節を駆動するモータの制御フローが不安定なモードに入った場合。一例として、ある関節を駆動するモータが振動するなどのように、不安定なモードになった場合には、その関節を目的とする角度に変更できないことがある。この場合にも、制御信号によって指示された角度と、関節の変更後の実際の角度とに差が生じることになる。
【0008】
(4)安全装置等によって緊急停止した場合。一例として、リンク機構と周辺設備等との物理的な干渉が検出され、それに応じて安全装置等によってリンク機構が緊急停止された場合にも、関節を目的とする角度に変更できないことになる。この場合にも、制御信号によって指示された角度と、関節の変更後の実際の角度とに差が生じることになる。
【0009】
なお、上記特許文献2,3に記載されているように、無線技術を用いて移動無線装置や端末局の位置を推定することが行われている。したがって、それらと同様にして、リンク側の通信部の位置を推定することも考えられるが、上記特許文献2に記載された方法をミリ波などの波長の短い電波での通信に適用する場合には、ビームを走査する必要があり、それに応じて時間が余分にかかるという問題がある。また、上記特許文献3に記載された方法をリンク機構が有するリンクに設けられた通信部の位置を推定するために用いる場合には、フィンガープリントが、リンク機構の形状やリンク機構の先端のハンド部が保持している物体などに依存するため、フィンガープリントを用いて適切に位置を特定できない可能性があるという問題がある。
【0010】
本発明は、上記状況に鑑みてなされたものであり、リンク機構が有するリンク側の通信部に電波を送信する際に、仮に制御信号によって指示されたように関節の角度が変更されていなかったとしても、目的とするリンク側の通信部に電波が適切に送信されるように電波の指向性を制御することができるリンク機構制御装置を提供することを目的とする。
【課題を解決するための手段】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
OMC株式会社
ロボット
29日前
株式会社クレスコ
補助吸着具
22日前
株式会社不二越
ロボット
14日前
株式会社エビス
腰ベルト用連結具
29日前
工機ホールディングス株式会社
作業機
1か月前
株式会社イノウ
給油口キャップ用開閉具
15日前
株式会社アイエイアイ
グリッパー
3日前
庄内機械株式会社
釘打装置
1日前
川崎重工業株式会社
制動システム
14日前
住友重機械工業株式会社
ロボット
8日前
株式会社不二越
垂直多関節ロボット
15日前
芝浦機械株式会社
双腕ロボット
7日前
トヨタ自動車東日本株式会社
搬送治具
1日前
アイホン株式会社
ネジ締めカウントシステム
16日前
トヨタ自動車株式会社
荷姿影響緩和方法
4日前
パナソニック株式会社
工具
15日前
株式会社デンソーウェーブ
ロボット制御システム
1か月前
パナソニック株式会社
工具
15日前
株式会社マキタ
電動工具
1日前
アピュアン株式会社
エアー式衝撃工具
1か月前
住友重機械工業株式会社
ロボット及びカバー
8日前
株式会社ダイヘン
端末装置
1日前
智頭電機株式会社
箱体把持装置、および、箱体把持方法
8日前
住友重機械工業株式会社
アクチュエータ支持部材
7日前
株式会社マキタ
打ち込み工具
1日前
株式会社マキタ
打ち込み工具
16日前
株式会社マキタ
打ち込み工具
1日前
株式会社マキタ
インパクト工具
1か月前
株式会社マキタ
インパクト工具
1か月前
株式会社不二越
ロボットの教示システム及び教示方法
1か月前
SB C&S株式会社
治具セット
29日前
中国電力株式会社
電動ドライバー
1か月前
株式会社ダイヘン
ハンド装置及びハンド装置の制御方法
1か月前
オムロン株式会社
モバイルロボット
1か月前
オムロン株式会社
モバイルロボット
1か月前
株式会社日立製作所
軌道計画システム
3日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ