TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025073217
公報種別
公開特許公報(A)
公開日
2025-05-13
出願番号
2023183792
出願日
2023-10-26
発明の名称
軌道計画システム
出願人
株式会社日立製作所
代理人
弁理士法人信友国際特許事務所
主分類
B25J
9/22 20060101AFI20250502BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】アームロボットのアームの動作時間が必要以上に長くなる軌道が生成されてしまうことを防ぐ。
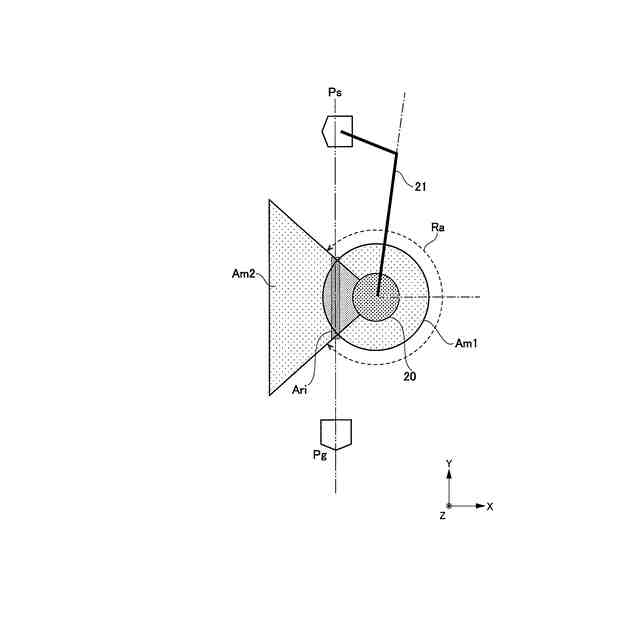
【解決手段】本発明の一態様に係る制御装置100は、軌道の計画に先立って、先端部が位置することができない、又は、所定の姿勢を取ることができない領域である非可動領域と、始点及び終点の間を結ぶ領域とが干渉するか否かを判定し、干渉すると判定した場合に、干渉が発生する干渉領域を算出する干渉領域算出部143と、設備構成情報と、始点及び終点の情報と、干渉領域の情報と、に基づいて、非可動領域を通らない軌道を計画する軌道計画部147と、を備える。
【選択図】図4
特許請求の範囲
【請求項1】
アームロボットの先端部を始点から終点まで移動させるための軌道を計画する軌道計画システムであって、
前記軌道の計画に先立って、前記先端部が位置することができない、又は、所定の姿勢を取ることができない領域である非可動領域と、前記始点及び前記終点の間を結ぶ領域とが干渉するか否かを判定し、干渉すると判定した場合に、干渉が発生する干渉領域を算出する干渉領域算出部と、
前記アームロボット及び前記アームロボットが稼働する設備の構成情報を示す設備構成情報と、前記始点及び前記終点の情報と、前記干渉領域の情報と、に基づいて、前記非可動領域を通らない前記軌道を計画する軌道計画部と、を備える
軌道計画システム。
続きを表示(約 840 文字)
【請求項2】
前記干渉領域算出部によって前記干渉領域が算出された場合、前記始点及び前記終点の間に少なくとも1つの中継点を生成する中継点生成部をさらに備え、
前記軌道計画部は、前記始点から前記中継点に向かう方向、及び、前記中継点から前記終点に向かう方向において前記軌道を構成する各経由点を探索する
請求項1に記載の軌道計画システム。
【請求項3】
前記干渉領域算出部は、前記非可動領域と、前記始点及び前記終点を結ぶ直線とが交わる直線状の領域を前記干渉領域として算出し、
前記中継点生成部は、前記干渉領域の略中心部と、前記アームロボットの胴体部分におけるいずれかの点とを結ぶ直線上に、前記中継点を生成する
請求項2に記載の軌道計画システム。
【請求項4】
前記中継点生成部は、前記直線上における前記干渉領域から離れる方向に前記中継点を生成する
請求項3に記載の軌道計画システム。
【請求項5】
前記中継点生成部は、前記直線上における前記干渉領域から離れる方向における、前記非可動領域から所定の閾値距離以上離れた位置に前記中継点を設定する
請求項4に記載の軌道計画システム。
【請求項6】
前記閾値距離は、前記軌道計画部が前記軌道を構成する各経由点を探索する場合における探索間隔距離である
請求項5に記載の軌道計画システム。
【請求項7】
前記軌道計画部は、前記始点、前記終点、前記非可動領域及び前記中継点が示される軌道情報表示画面を表示装置に表示させる
請求項1~6のいずれか一項に記載の軌道計画システム。
【請求項8】
前記軌道計画部は、軌道情報表示画面を介して前記中継点の位置及び/又は姿勢の調整が指示された場合、前記指示に基づいて前記中継点の位置及び/又は姿勢を変更する
請求項7に記載の軌道計画システム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、軌道計画システムに関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
従来、製造プラントにおいて用いられるアームロボットのアームの軌道を計画する軌道計画装置が知られている。例えば、特許文献1には、ロボットアームの先端部で保持する物体の安定化を図ることを可能にする軌道計画を生成する軌道計画生成装置が開示されている。また、例えば、特許文献2には、作業者の熟練度によらず、ロボットの現実的な干渉回避経路を自動的に生成できるロボットシミュレーション装置が開示されている。
【先行技術文献】
【特許文献】
【0003】
特開2021-79482号公報
特開2015-160277号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、ロボットによるワークの搬送作業においては、搬送物の形状毎、また、搬送開始位置や終了位置などのアームの位置が変化する毎に、複数のロボット位置姿勢情報をユーザ側で手動によってロボット制御装置に教示する必要がある。このとき、ユーザは、始終点のそれぞれのロボット位置姿勢情報に加えて、始終点の間の経路における複数のロボット位置姿勢情報も教示する。始終点の間の経路における複数のロボット位置姿勢情報は、ロボットのアームが加工機やワーク棚などの障害物と接触しない位置姿勢である必要がある。したがって、ロボット位置姿勢情報を教示するユーザにかかる負担が大きいため、始終点間の各地点におけるユーザによる教示を要することなく、自動でロボットの軌道を生成可能な技術の提案が求められていた。
【0005】
特許文献1には、未探索であり、かつ、コストが最小の探索点を軌道点P
current
として決定し、現在の先端部の軌道点P
current
からの移動先となる次の軌道点候補P
next
となる探索点を複数算出し、軌道点候補P
next
における関節角度をとったロボットアームが障害物と干渉するか否かを判定する手法が記載されている。また、特許文献1には、干渉する場合にはその軌道点候補P
next
を手先探索データから消去することが記載されている。
【0006】
特許文献2には、ロボットシミュレーション装置の動作経路生成部が、シミュレーションに基づき生成された動作経路をロボットに移動させた場合における、ロボットと周辺物との干渉の発生の有無を検出することが記載されている。また、特許文献2には、干渉の発生が検出された場合、干渉が発生する前後の教示点の情報に基づいて、干渉を発生させない新たな動作経路を生成することが記載されている。
【0007】
ところが、特許文献1及び特許文献2のいずれにおいても、ロボットと周囲物等との干渉の有無の判定が経路(軌道)の生成途中において実施される。そして、次の経由点の探索が、現在位置の周囲においてのみ行われるため、探索は局所的なものとなる。したがって、軌道を探索する方向と、周囲物等の位置との兼ね合い等によっては、アームロボットのアームの動作時間が必要以上に長くなる経路(軌道)が生成される可能性がある。
【0008】
本発明は、上記の状況を考慮してなされたものであり、アームロボットのアームの動作時間が必要以上に長くなる軌道が生成されてしまうことを防ぐことにある。
【課題を解決するための手段】
【0009】
本発明の一態様に係る軌道生成システムは、アームロボットの先端部を始点から終点まで移動させるための軌道を計画する軌道計画システムである。本発明の一態様に係る軌道生成システムは、軌道の計画に先立って、先端部が位置することができない、又は、所定の姿勢を取ることができない領域である非可動領域と、始点及び終点の間を結ぶ領域とが干渉するか否かを判定し、干渉すると判定した場合に、干渉が発生する干渉領域を算出する干渉領域算出部と、アームロボット及びアームロボットが稼働する設備の構成情報を示す設備構成情報と、始点及び終点の情報と、干渉領域の情報と、に基づいて、非可動領域を通らない軌道を計画する軌道計画部と、を備える。
【発明の効果】
【0010】
本発明の少なくとも一態様によれば、アームロボットのアームの動作時間が必要以上に長くなる軌道が生成されてしまうことを防ぐことができる。
上記した以外の課題、構成及び効果は、以下の実施形態の説明により明らかにされる。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
日東精工株式会社
電動ドライバ
6日前
トヨタ自動車株式会社
関節機構
11日前
株式会社ダイヘン
移動体
9日前
株式会社不二越
ロボット
1か月前
東京都公立大学法人
対象物把持装置
20日前
学校法人五島育英会
アーム機構
11日前
株式会社スター精機
吸着パッド
5日前
株式会社スター精機
吸着パッド
5日前
株式会社アイエイアイ
グリッパー
26日前
株式会社PILLAR
チューブ保持治具
16日前
株式会社イノウ
給油口キャップ用開閉具
1か月前
住友重機械工業株式会社
ロボット
1か月前
川崎重工業株式会社
制動システム
1か月前
庄内機械株式会社
釘打装置
24日前
株式会社スター精機
産業用ロボット
3日前
株式会社不二越
垂直多関節ロボット
1か月前
オークラ輸送機株式会社
ハンド装置
19日前
トヨタ自動車東日本株式会社
搬送治具
24日前
株式会社マキタ
電動作業機
12日前
株式会社マキタ
電動作業機
12日前
芝浦機械株式会社
双腕ロボット
1か月前
株式会社リコー
多関節ロボット
10日前
アイホン株式会社
ネジ締めカウントシステム
1か月前
株式会社安川電機
ロボット
3日前
株式会社安川電機
ロボット
3日前
株式会社ダイヘン
ロボット制御システム
9日前
株式会社安川電機
ロボット
3日前
トヨタ自動車株式会社
荷姿影響緩和方法
27日前
小倉クラッチ株式会社
ロボット用ツール交換装置
5日前
パナソニック株式会社
工具
1か月前
パナソニック株式会社
工具
1か月前
セイコーエプソン株式会社
ロボット
5日前
個人
回転移動式工具ホルダ
18日前
株式会社マキタ
電動工具
24日前
住友重機械工業株式会社
ロボット及びカバー
1か月前
オムロン株式会社
ロボット
2日前
続きを見る
他の特許を見る






 特許ウォッチ
特許ウォッチ