TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025069680
公報種別
公開特許公報(A)
公開日
2025-05-01
出願番号
2023179559
出願日
2023-10-18
発明の名称
車両の制御装置
出願人
トヨタ自動車株式会社
代理人
弁理士法人アイテック国際特許事務所
主分類
B60L
15/20 20060101AFI20250423BHJP(車両一般)
要約
【課題】より適正に振動を抑制できる。
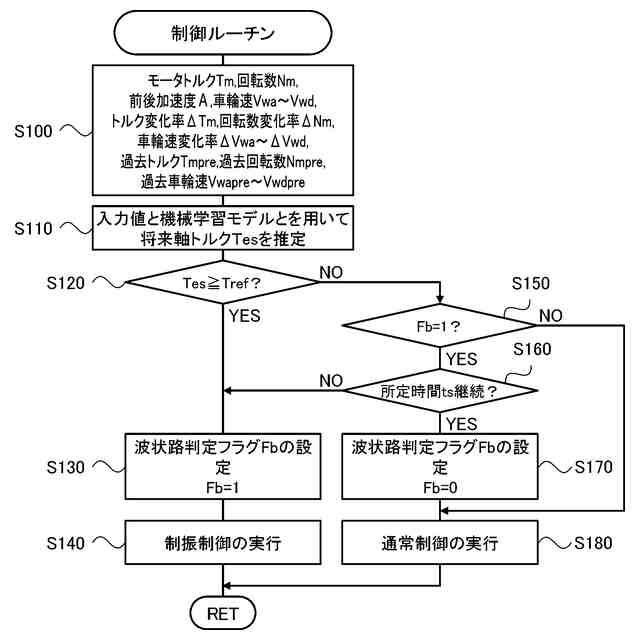
【解決手段】車軸に連結された駆動軸に動力を出力するモータを備える車両に用いられ、モータを制御する車両の制御装置であって、現在および現在から第1時間前までのモータのトルクとモータの回転数と車輪速とを説明変数とし現在から第2時間後の駆動軸の将来軸トルクまたは駆動軸のトルクを反映する将来反映値を目的変数とする機械学習モデルと、現在および現在から第1時間前までの過去のモータのトルクとモータの回転数と車輪速と、を用いて将来軸トルクまたは将来反映値を推定し、推定した将来軸トルクまたは将来反映値に基づいてモータの振動を抑制する制振制御を実行する。
【選択図】図2
特許請求の範囲
【請求項1】
車軸に連結された駆動軸に動力を出力するモータを備える車両に用いられ、前記モータを制御する車両の制御装置であって、
現在および現在から第1時間前までの前記モータのトルクと前記モータの回転数と車輪速とを説明変数とし現在から第2時間後の前記駆動軸のトルクとしての将来軸トルクまたは前記将来軸トルクを反映する将来反映値を目的変数とする機械学習モデルと、現在および現在から前記第1時間前までの前記モータのトルクと前記モータの回転数と前記車輪速と、を用いて前記将来軸トルクまたは前記将来反映値を推定し、推定した前記将来軸トルクまたは前記将来反映値に基づいて前記モータの振動を抑制する制振制御を実行する
車両の制御装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、車両の制御装置に関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
従来、この種の車両の制御装置としては、車軸に連結された駆動軸に動力を出力するモータを備える車両に用いられるものが提案されている(例えば、特許文献1参照)。この装置では、モータの回転速度の検出値と予め定めた駆動系のねじれ剛性やダイヤと路面との摩擦係数を考慮したモデルとを用いて補償トルクを演算し、モータのトルク指令から補償トルクを減算したトルクが出力されるようにモータを制御する。これにより、精度よく制振制御を行なっているとしている。
【先行技術文献】
【特許文献】
【0003】
特開2022-58067号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、振動を抑制する手法として、モータの回転数の変動の積算値が判定閾値以上のときに振動が発生していると判定し、振動を抑制する制振制御を実行するものが提案されている。振動をより小さくするために、振動の発生初期の振動が小さい段階で、迅速に振動の発生を判定して、制振制御を実行する必要がある。迅速に振動の発生を判定する手法として、判定閾値を下げる手法がある。しかし、判定閾値を下げると、制振制御が必要でない路面でも制振制御を行なってしまう機会が増え、ドライバビリティが低下することがある。したがって、より精度よく振動の発生を判定して制振制御を実行して、より適正に振動を抑制することが望まれている。
【0005】
本開示の車両の制御装置は、より適正に振動を抑制することを主目的とする。
【課題を解決するための手段】
【0006】
本開示の車両の制御装置は、上述の主目的を達成するために以下の手段を採った。
【0007】
本開示の車両の制御装置は、
車軸に連結された駆動軸に動力を出力するモータを備える車両に用いられ、前記モータを制御する車両の制御装置であって、
現在および現在から第1時間前までの前記モータのトルクと前記モータの回転数と車輪速とを説明変数とし現在から第2時間後の前記駆動軸のトルクとしての将来軸トルクまたは前記将来軸トルクを反映する将来反映値を目的変数とする機械学習モデルと、現在および現在から前記第1時間前までの前記モータのトルクと前記モータの回転数と前記車輪速と、を用いて前記将来軸トルクまたは前記将来反映値を推定し、推定した前記将来軸トルクまたは前記将来反映値に基づいて前記モータの振動を抑制する制振制御を実行する
ことを要旨とする。
【0008】
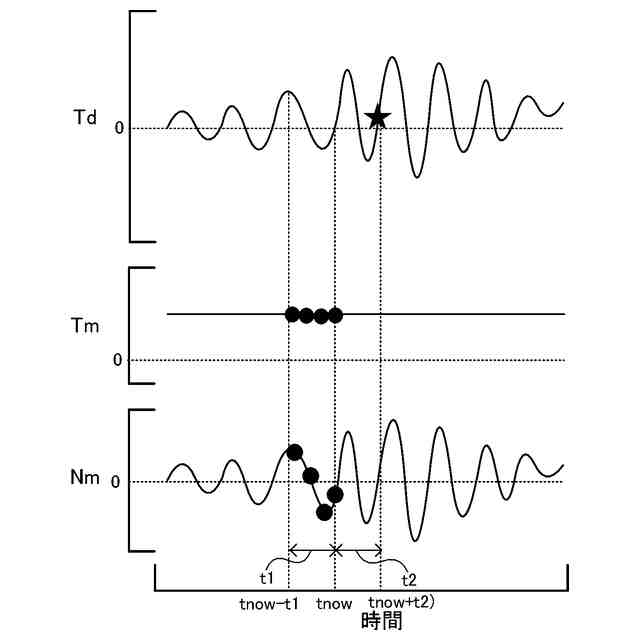
この本開示の車両の制御装置では、現在および現在から第1時間前までのモータのトルクとモータの回転数と車輪速とを説明変数とし現在から第2時間後の駆動軸のトルクとしての将来軸トルクまたは将来軸トルクを反映する将来反映値を目的変数とする機械学習モデルと、現在および現在から第1時間前までのモータのトルクとモータの回転数と車輪速と、を用いて将来軸トルクまたは将来反映値を推定し、推定した将来軸トルクまたは将来反映値に基づいてモータの振動を抑制する制振制御を実行する。機械学習モデルと、現在および現在から第1時間前までのモータのトルクとモータの回転数と車輪速と、を用いて将来軸トルクまたは将来反映値を推定するから、より精度よく将来軸トルクまたは将来反映値を推定できる。こうして精度よく推定した将来軸トルクまたは将来反映値に基づいてモータの振動を抑制する制振制御を実行するから、より精度のよい制振制御を実行できる。この結果、より適正に振動を抑制できる。ここで、「第1時間」としては、想定される駆動軸の振動の変動の半周期から1周期に相当する時間などを挙げることができる。「第2時間」としては、想定される駆動軸の振動の変動の1周期から1.5周期に相当する時間などを挙げることができる。
【図面の簡単な説明】
【0009】
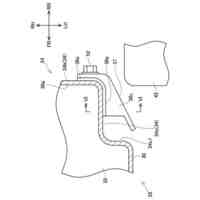
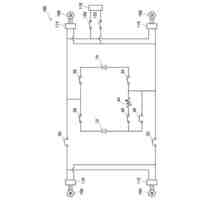
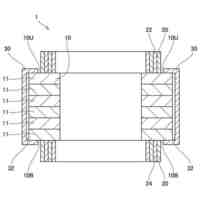
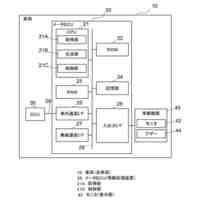
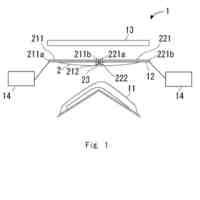
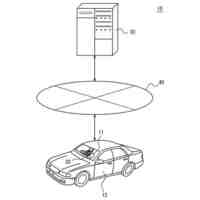
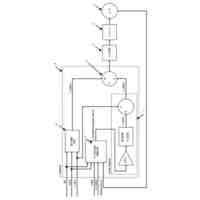
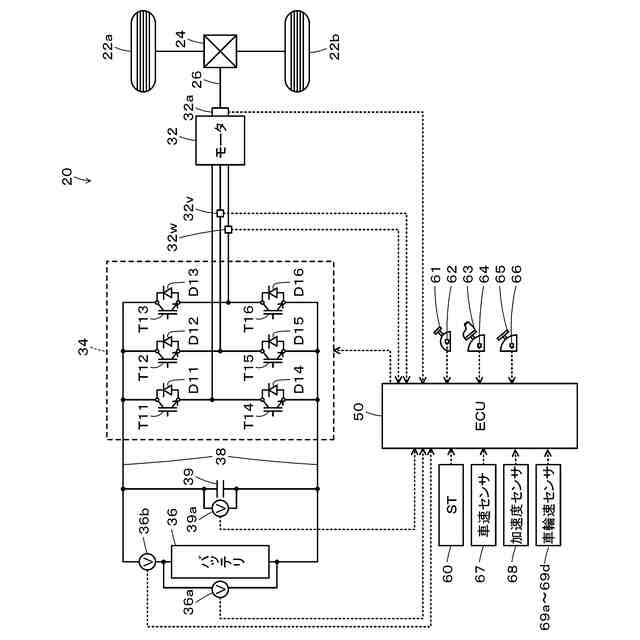
本開示の実施形態の電気自動車20の概略構成図である。
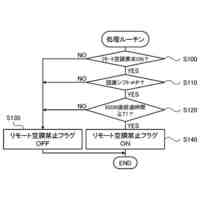
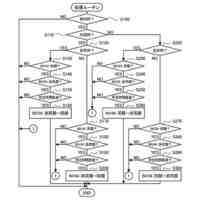
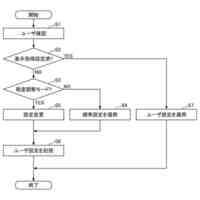
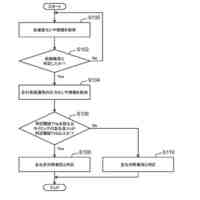
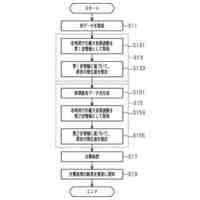
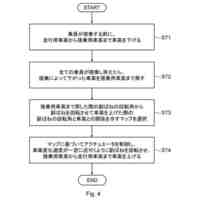
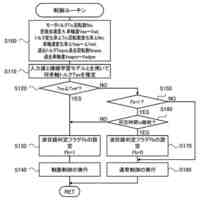
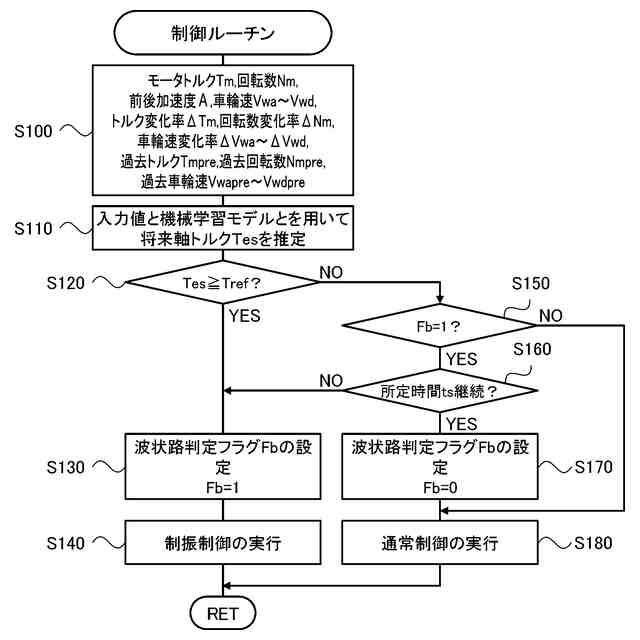
制御ルーチンの一例を示すフローチャートである。
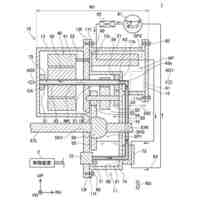
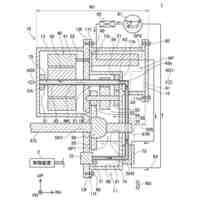
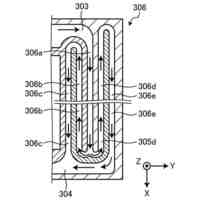
将来軸トルクTesを推定する様子を説明するための説明図である。
【発明を実施するための形態】
【0010】
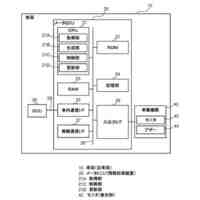
本開示の実施形態について図面を参照しながら説明する。図1は、本開示の実施形態の電気自動車20の概略構成図である。図示するように、実施形態の電気自動車20は、モータ32と、インバータ34と、バッテリ36と、電子制御ユニット(以下、「ECU」という)50とを備える。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
トヨタ自動車株式会社
車両
8日前
トヨタ自動車株式会社
方法
4日前
トヨタ自動車株式会社
車両
1日前
トヨタ自動車株式会社
方法
1日前
トヨタ自動車株式会社
組電池
4日前
トヨタ自動車株式会社
電動車
今日
トヨタ自動車株式会社
電動車
1日前
トヨタ自動車株式会社
配車装置
今日
トヨタ自動車株式会社
電源装置
今日
トヨタ自動車株式会社
駆動装置
今日
トヨタ自動車株式会社
駆動装置
今日
トヨタ自動車株式会社
検査装置
2日前
トヨタ自動車株式会社
ステータ
今日
トヨタ自動車株式会社
触媒装置
今日
トヨタ自動車株式会社
充電装置
今日
トヨタ自動車株式会社
表示装置
今日
トヨタ自動車株式会社
電動車両
2日前
トヨタ自動車株式会社
電池冷却器
2日前
トヨタ自動車株式会社
全固体電池
8日前
トヨタ自動車株式会社
シール構造
今日
トヨタ自動車株式会社
車両制御装置
今日
トヨタ自動車株式会社
モータケース
今日
トヨタ自動車株式会社
情報処理装置
今日
トヨタ自動車株式会社
衝突検出装置
今日
トヨタ自動車株式会社
音源推定方法
今日
トヨタ自動車株式会社
情報処理装置
今日
トヨタ自動車株式会社
電力変換装置
1日前
トヨタ自動車株式会社
真空成形装置
1日前
トヨタ自動車株式会社
音声制御装置
8日前
トヨタ自動車株式会社
異常診断装置
今日
トヨタ自動車株式会社
部品固定構造
今日
トヨタ自動車株式会社
車高調整方法
今日
トヨタ自動車株式会社
車両の制御装置
1日前
トヨタ自動車株式会社
モータ制御方法
1日前
トヨタ自動車株式会社
ハイブリッド車
今日
トヨタ自動車株式会社
車両の制御装置
今日
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ